1
(21)4399647/15
(22)29.02.88
(46) 28.02.91 . Бюл. Х° 8
(71)Днепровское бассейновое управление водных путей
(72)Р.Б. Лобанов, Д.А.Будник, А.Н.Пересунько и В.А. Черный (53) 627.833(088.8)
(56) Авторское свидетельство СССР № 1208130, кл. Е 02 В 7/36, 1984.
(54) ГИДРОПРИВОД ГИДРОТЕХНИЧЕСКОГО ЗАТВОРА
(57) Изобретение относится к гидроавтоматике и может быть использовано в гидравлических подъемных механизмах судоходных шлюзов, имеющих два независимых гидроподъемника. Целью изобретения является увеличение функциональных возможностей шлюза за счет повыиения точности и надежности ра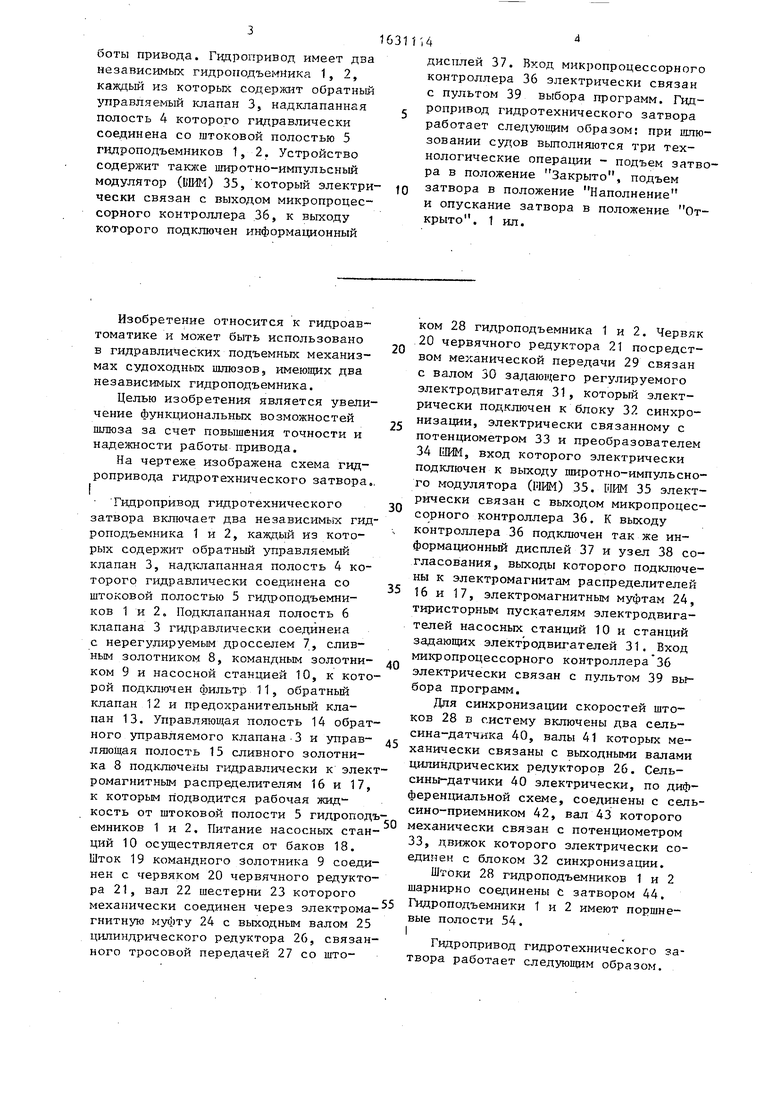
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1236208A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1749361A1 |
| Устройство управления гидроприводом затвора шлюза | 1985 |
|
SU1282081A1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1234515A1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Устройство управления гидроприводом затвора шлюза | 1990 |
|
SU1745815A1 |
#SS
ел
о
00
J1
боты привода. Гидропривод имеет два независимых гидроподъемника 1, 2, каждый из которых содержит обратный управляемый клапан 3, надклапанная полость 4 которого гидравлически соединена со штоковой полостью 5 гидроподъемников 1, 2. Устройство содержит также широтно-импульсный модулятор (01ИМ) 35, который электри- чески связан с выходом микропроцессорного контроллера 36, к выходу которого подключен информационный
Изобретение относится к гидроавтоматике и может быть использовано в гидравлических подъемных механизмах судоходных шлюзов, имеющих два независимых гидроподъемника.
Целью изобретения является увеличение функциональных возможностей шлюза за счет повышения точности и надежности работы привода.
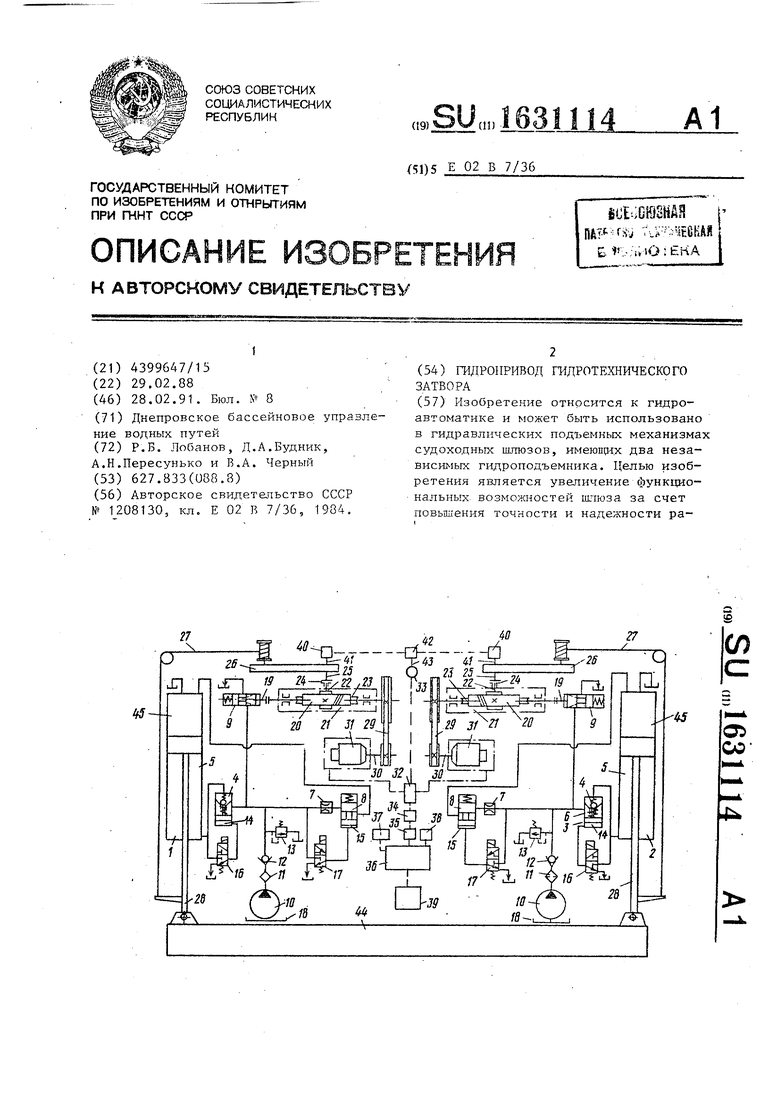
На чертеже изображена схема гидропривода гидротехнического затвора.
Гидропривод гидротехнического
затвора включает два независимых гидроподъемника 1 и 2, каждый из которых содержит обратный управляемый клапан 3, надклапанная полость 4 которого гидравлически соединена со штоковой полостью 5 гидроподъемников 1 и 2. Подклапанная полость 6 клапана 3 гидравлически соединена с нерегулируемым дросселем 7, сливным золотником 8, командным золотником 9 и насосной станцией 10, к которой подключен фильтр 11, обратный клапан 12 и предохранительный клапан 13. Управляющая полость 14 обратного управляемого клапана 3 и управляющая полость 15 сливного золотника 8 подключены гидравлически к элект1 ромагнитным распределителям 16 и 17, к которым подводится рабочая жидкость ОТ ШТОКОВОЙ ПОЛОСТИ 5 ГИДРОПОДЪ
емников 1 и 2. Питание насосных станций 10 осуществляется от баков 18. Шток 19 командного золотника 9 соединен с червяком 20 червячного редуктора 21, вал 22 шестерни 23 которого механически соединен через электромагнитную муфту 24 с выходным валом 25 цилиндрического редуктора 26, связанного тросовой передачей 27 со штодисплей 37. Вход микропроцессорного контроллера 36 электрически связан с пультом 39 выбора программ. Гидропривод гидротехнического затвора работает следующим образом: при шлюзовании судов выполняются три технологические операции - подъем затвора в положение Закрыто, подъем затвора в положение Наполнение и опускание затвора в положение Открыто. 1 ил.
0
5
0
5
0
5
0
5
ком 28 гидроподъемника 1 и 2. Червяк 20 червячного редуктора 21 посредством механической передачи 29 связан с валом 50 задающего регулируемого электродвигателя 31, который электрически подключен к блоку 32 синхронизации, электрически связанному с потенциометром 33 и преобразователем 34 ШИМ, вход которого электрически подключен к выходу широтно-импульсно- го модулятора (ШИМ) 35. ШИМ 35 электрически связан с выходом микропроцессорного контроллера 36. К выходу контроллера 36 подключен так же информационный дисплей 37 и узел 38 согласования, выходы которого подключены к электромагнитам распределителей 16 и 17, электромагнитным муфтам 24, тиристорным пускателям электродвигателей насосных станций 10 и станций задающих электродвигателей 31. Вход микропроцессорного контроллера 36 электрически связан с пультом 39 выбора программ.
Для синхронизации скоростей штоков 28 в систему включены два сельсина-датчика 40, валы 41 которых механически связаны с выходными валами цилиндрических редукторов 26. Сельсины-датчики 40 электрически, по дифференциальной схеме, соединены с сель- сино-приемником 42, вал 43 которого механически связан с потенциометром 33, движок которого электрически соединен с блоком 32 синхронизации.
Штоки 28 гидроподъемников 1 и 2 шарнирно соединены с затвором 44. Гидроподъемники 1 и 2 имеют поршневые полости 54. I
Гидропривод гидротехнического затвора работает следующим образом.
D16
При шлюзовании судов выполняются три технологические операции - подъем затвора в положение Закрыто, подъем затвора в положение Наполнение и опускание затвора в положение Открыто .
Подъем затвора в положение Закрыто осуществляется по одному из запрограммированных, наиболее оптималь- ному для конкретных условий, графику. На пульте 39 выбора программ нажимается клавиша выбранной программы, в результате чего подается сигнал на микропроцессорный контроллер 36, в котором записана программа этой технологической операции, В контроллере 36 формируются цифровые сигналы в соответствии с включенной программой, которые с выхода контроллера поступают на вход МИМ 35, где преобразовываются в широтно-импульсные сигналы и поступают на вход преобразователя 34 ЫИМ. С выхода преобразователя 34 непрерывный сигнал управления поступает в блок 32 синхронизации, где суммируется с сигналом перекоса, поступающего от потенциометра 33 и результирующие сигналы управления поступают на задающие регулируемые электродвигатели 31 гидроподъемников 1 и 2. Одновременно с выхода контроллера 36 сигналы поступают на информационный дисплей 37 и узел 38 согласования, включающий тиристорные пус- катели электродвигателей насосных станций 10, электромагнитные муфты 24 и тиристорные пускатели станций задающих электродвигателей 31. Насосные станции 10 начинают подавать ра- бочую жидкость, которая проходит через фильтр 11, обратный клапан 12 и через открытый под действием пружины командный золотник 9 поступает на слив. Под воздействием сигк т.а уп- равления, поступающего от блока 32 синхронизации, задающие регулируемые электродвигатели 31 начинают вращаться с частотой, пропорциональной запрограммированному закону движения затвора, и посредством механической передачи 29 передают вращательное движение червяку 20 червячного редуктора 21 каждого гидроподъемника 1 и 2 Червяки 20, ввинчиваясь в зубья не- подвижных шестерен 23, сдвигаются в продольном направлении и прикрывают командные золотники 9. Слив рабочей жидкости через командные золотни
5
0
5
1
0 5 0 5 0
0
14
ки 9 уменьшается,, а рабочая жидкость из напорной гидролинии поступает через обратные управляющие клапаны 3, которые под напором жидкости открываются, в штоковне полости 5 гидроподъемников 1 и 2, приводя в движение затвор 44. Валы 22 шестерен 23 червячных редукторов 21 начинают вращаться посредством цилиндрических редукторов 26, связанных со штоком 28 гидроподъемников 1 и 2 тросовыми передачами 27.
Сигнал управления, выдаваемый микропроцессорным контроллером 36, непрерывно изменяется в функции времени, пропорционально запрограммированному закону перемещения затвора 44. Соответственно изменяется и частота вращения задающих электродвигателей 31 и скорость перемещения червяков 20.
Если скорость затвора 44 соответствует частоте врашения задающих электродвигателей 32, командные золотники 9 находятся в определенном положении, при этом в редукторах 21 происходит обкатывание зубьев шестерен 23 и червяков 20. При изменении скорости затвора по отношению к заданной червяки 20 редукторов 21 перемещаются вдоль продольных осей, изменяя положение командных золотников. Если скорость затвора станет меньше заданной, частота вращения шестерен 23 так же уменьшается и червяки 20 перемещаются на прикрытие золотников 9. Скорость затвора 44 увеличивается. Если скорость затвора увеличивается по отношению к заданной, соответственно увеличивается частота вращения шестерен 23, которые перемещают червяки 20 на открытие золотников 9. Скорость затвора 44 понижается. При достижении затвором конечного положения Закрыто снимается питание с микропроцессорного контроллера 36 и все элементы схемы обесточиваются. Обратные управляемые клапаны 3 закрываются под действием давления в штоковых полостях 5 гидроподъемников 1 и 2, командные золотники 9 открываются под действием пружин в их торцовых частях, так как при обесточенных электромагнитных муфтах 24 шестерни 23 редукторов 21 свободно вращаются на подшипниках. Затвор 44 удерживается в заданном положении на масляных подушках в штоковых полостях 5 гидроподъемников 1 и 2.
Подъем затвора 44 в положение Наполнение,
На пульте 39 выбора программ нажимается одна из клавишей Наполнение в зависимости от выбранного графика движения затвора, оптимального для данного судна или группы судов. Количество графиков и законы перемещения затвора два разных шлю- зов выбираются исходя из конкретных условий и конструктивных особенностей шлюзов, В остальном принцип работы системы управления такой же, как и при технологической операции Закрыть, за тем исключением, что реализуются другие законы перемещения затвора 44, обеспечивающие максимально допустимую скорость затвора в данной технологической опера-
ции. I
Опускание затвора в положение Открыть
Эта операция осуществляется по одному оптимальному, скоростному гра- фику - программе. На пульте 39 выбора программ нажимается клавиша Открыть, в результате подается сигнал на микропроцессорный контроллер 36, в котором записана программа этой технологической операции. В контроллере 36 формируются цифровые сигналы в соответствии с включенной программой, которые с выхода контроллера 36 поступают на вход ШИМ 35, где преоб- разовьгоаются в широть о-импульсные сигналы и поступают в преобразователь 34, где преобразуются в аналоговые и, суммируясь с сигналами от потенциометра 33 в блоке 32 синхро- иизации, поступают на задающие электродвигатели 31 гидроподъемников 1 и 2 Одновременно с выхода контроллера 36 сигналы поступают- на информационный дисплей 37 и на узел 38 согласо- вания, который включает электромагниты распределителей 16 и 17, электромагнитные муфты 24. При подаче питания на электромагниты распределителе 16 и 17 рабочая жидкость, находяща- яся в штоковых полостях 5 гидроподъемников 1 и 2 под давлением от веса затвора 44, поступает в управляющие полости 14 и 15 клапанов 3 и сливного золотника 8. При этом клапан 3 и сливной золотник 8 открываются и рабочая жидкость, находящаяся в штоковых полостях 5 гидроподъемников 1 и 2s поступает через надклапан-
с Q 5
5
ную 4 в подклапанную 6 полость клапана 3, а затем в напорную гидролинию и разветвляется на два потока, один из которых, проходя через дроссель 7 и открытый сливной золотник 8, поступает в поршневую полость 45 каждого гидроподъемника 1 и 2, а другой проходит через командный золотник 9 на слив. Затвор 44 под действием собственного веса опускается. Дроссели 7 служат для предварительной установки заданной скорости затвора 44„ Точное поддержание заданной скорости осуществляется автоматически командными золотниками 9., на которые воздействуют продольно перемещающиеся червяки 20 червячных редукторов 21 о Точная скорость затвору 44 задается частотой вращения червяка Э, приводимого во вращение задающими элс-ктродвигателями 31, причем электродвигатели 31 в этой операции реверсируются, так как при опускании затвора 44 направление вращения шестерен 23 червячных редукторов 21 меняется на противоположное по отношению к подъему затвора 44. Так как при отпускании затвора 44 увеличивающийся объем жидкости в поршневых полостях 45 гидроподъемников 1 и 2 больше, чем объем жидкости, вытесняемой из штоковых полостей 5 за счет объема, занимаемого штоками 28, для полного заполнения поршневых полостей 45 к ним подключены гидролинии, по которым производится подсос рабочей жидкое,™ из баков 18.
Если скорость затвора 44 станет меньше заданной, соответственно уменьшится частота вращения валов 22 и шестерен 23 червячных редукторов 21 и червяки 20, выворачиваясь из зубьев шестер л 23, приоткроют командные золотники 9, увеличив слив рабочей жидкости из штоковых полостей 5 гидроподъемников 1 и 2, повысив тем самым скорость опускания затвора 44. Если скорость затвора станет больше заданной, золотники 9 переместятся в сторону прикрытия окон и скорость опускания затвора 44 уменьшится. Если скорость затвора соответствует заданной, в червячных редукторах 21 происходит обкатывание зубьев шестерен 23 и червяков 20, командные золотники неподвижны. i
При достижении затвором 44 конечного положения Открыто снимается
питание с микропроцессорного контроллера 36, все элементы схемы обесточиваются. Управляющие полости 14 и 15 клапанов 3 и золотников 8 сообщаются со сливом, кпапрн 3 и золотник 8 закрываются, командный золотник 9 открывается. Затвор 44 удерживается в заданном положении на масляных подушках в штоковых полостях 5 гидро- подъемников 1 и 2.
Для поддержания затвора 44 в горизонтальном положении во всех технологических операциях применена система синхронизации, состоящая из двух сельсинов-датчиков 40 и сельсина-приемника 42, которые образуют систему измерения перекоса затвора 44. Сельсины-датчики 40, связанные с выходными валами 41 цилиндрических редукторов 26, контролируют положение штоков 28 гидроподъемников 1 и 2. Сельсины-датчики 40 соединены m дифйе- ренциальной схеме с сельсином-приемником 42. В результате этого угол пово- рота ротора сельсина-приемника 42 оказывается пропорциональным рассогласованию угловых положений роторов сельсинов-датчиков 40, соответственно - разности координат положений штоков 28 гидроподъемников 1 и 2, что и определяет перекос затвора 44. Измеренная таким образом величина перекоса затвора 44 преобразуется в сигнал управления с помощью потенциометра 33, движок которого связан с валом 43 сельсина-приемника 42. При отсутствии перекоса затвора 44, вал 43 сельсина-приемника 42 и дви
жок потенциометра 33 находятся в нейтральном положении, в результате чего на выходе потенциометра 33 сигнал отсутствует. При появлении перекоса затвора 44 вал 43 сельсина-г иемни- ка 42 поворачивается из нейтрального положения на соответствующий угол, смещая при этом движок потенциометра 33. На выходе потенциометра 33 возникает сигнал, пропорциональный разности положений штоков 28 гидроцилиндров 1 и 2, Этот сигнал подается на вход блока 32 синхронизации, где суммируется с сигналом управления, поступающим от микропроцессорного контроллера 36 после преобразования его в преобразователе 34 МИМ. Причем суммирование происходит следующим образом: при подъеме затвора 44 вверх сигнал от потенциометра 33 прибавля
д
5
0
0
0
5
0
ется к сигналу управления, поступают му на задающий электродвигатель 31 отстающего гидроподъемника (например 1) и вычитается из сигнала управ ления поступающего на задающий элект родвигатель 31 опережающего гидроподъемника (например 2); при опускании затвора 44 сигнал, поступающий от потенциометра 33, прибавляется к сигналу управления отсг ающсго гидроподъемника (например 1) и вычитается из сигнала управления опережающего гидроподъемника (например 2). В первом и во втором случаях скорость отстающего гидроподъемника 1 увеличивается, а опережающего гидроподъемника 2 уменьшается. В результате происходит выравнивание положений штоков 28 и устраняется перекос затво ра 44. Формула изобретения
Гидропривод гидротехнического затвора, включающий два гидроподъемника, каждый из которых связан одним выходом с обратным управляемым клапаном, другим выходом - со сливным золотником, а также дроссель, задающий регулируемый электродвигатель, пульт выбора программ, устройство согласования с сельсинами и потенциометром, связанным с блоком синхронизации, два электромагнитных распределителя, соединяющих напорную гид- ролинию с управляющими полостями обратного клапана и сливного золотника, червячный и цилиндрический редукторы, командный золотник, подключенный в гидролинию между обратным управляемым клапаном и дросселем, сообщающий напорную гидролинию со сливной и механически связанный с червяком червячного редуктора, вал шестерни которого механически соединен с цилиндрическим редуктором, механически связанным со штоком гидроподъемника, причем червяк механически связан с задающим электродвигателем, электрически подключенным к программному блоку, который электрически подключен к пульту выбора программ, о т- личающиися тем, что, с целью увеличения функциональных возможностей шлюза за счет повышения точности и надежности работы привода, в него введены микропроцессорный контроллер, вход которого подключен к пульту выбора программ, широтно-им- пульсный модулятор, вход которого
11163111412
подключен к выходу микропроцессорногоэлектромагнитным муфтам, тиристорным контроллера, преобразователь широт-пускателям электродвигателей насос- но-импульсного сигнала в аналоговый,ных станций и к станциям задающих вход которого подключен к выходу ши- сэлектродвигателей, блок синхрониза- ротно-импульсного модулятора, а вы-ции, входы которого подключены к выход - к входу блока синхронизации,Х°ДУ преобразователя широтно-импульс- информационный дисплей, вход которогоного модулятора и к потенциометру, подключен к выходу микропроцессорногоподвижный элемент которого механичес- контроллера, узел согласования, вход toки соеДинен с сельсином-приемником, которого подключен к выходу микропро-а выходы - с задающим регулируемым цессорного контроллера, а выходы -электродвителем i обоих гидроподъем- к электромагнитам распределителей,ников.