расформируется информация о параметрах прикладываемого вектора силы. Однако, вследствие различных моментов инерции поперечных сечений перемычки относительно его главных центральных осей, чув- ствительность датчика к крутящему моменту будет меньше чувствительности датчика к любой из остальных пяти измеряемым силовым компонентам. Кроме того, сдвиговые т ёнзорезисторы включены в мостовую схему, что обуславливает использование компенсационных (дополнительных) тензорезисторов, в то время как для датчика достаточно использования 6 тензорезисторов.
Целью изобретения является повышение чувствительности и экономичности датчика.
Поставленная цель достигается тем, что в датчике, состоящем из двух расположен- ных друг над другом колец, соединенных между собой расположенными по периметру на одинаковом расстянии друг от друга как минимум тремя перемычками, на внутренней и на внешней поверхностях которых размещены тензорезисторы, поперечное сечение каждой перемычки представляет собой поворотно-симметричное кольцо, у которого главный порядок его поворотной симметрии равен бесконечности, а на внут- ренней и на внешней поверхностях каждой перемычки размещено, как минимум, по одному тензорезистору растяжения-сжатия, причем вертикальная ось перемычки образует с главной осью каждого из двух накле-
енных на нее тензорезисторов угол
1 а arctg(V2 +V2 +,
где« - коэффифициент Пуассона материа- ла упруго элемента датчика.
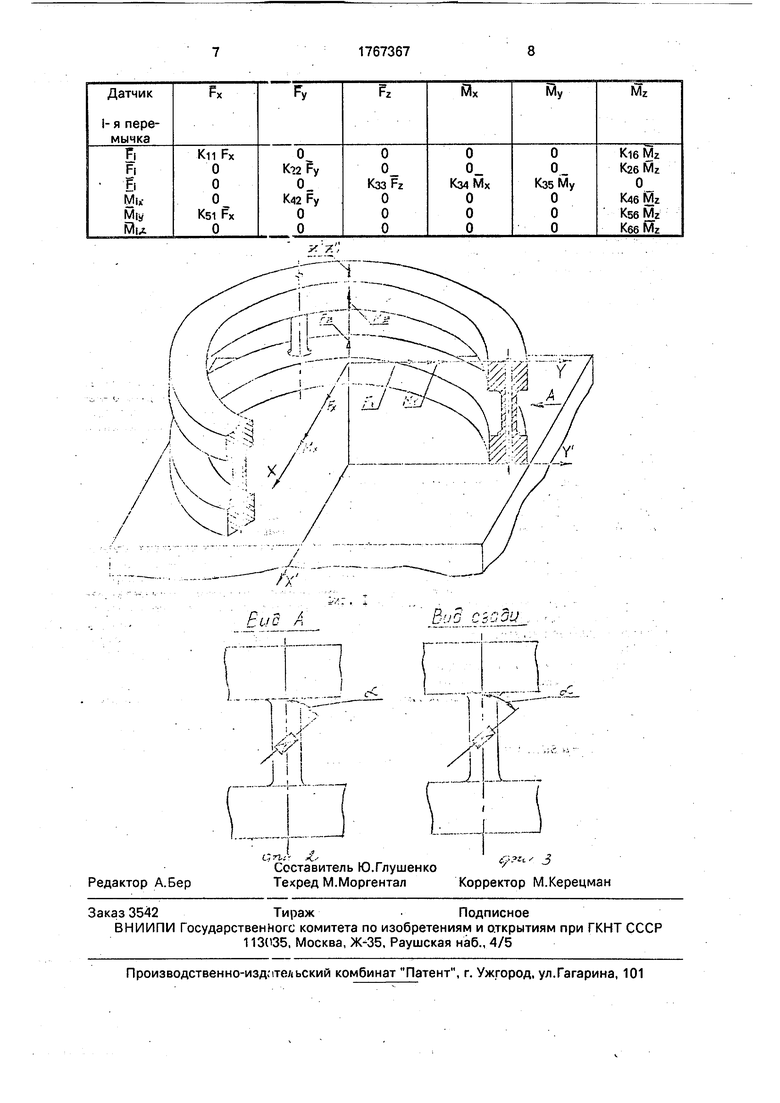
На фиг.1 схематично изображен предлагаемый датчик, общий вид; на фиг,2 и 3 - перемычка с размещенными на ней тензо- резисторами.
Датчик работает следующим образом.
Действие на датчик произвольно на; правленного в пространстве вектора силы F в общем случае эквивалентно действию шести силовых компонент: трех сил Fx, Fy, F2 и трех моментов сил Мх, My, Mz. результирующая действия на еремычки векторов Fx, Fy и Mz есть вектор Fp, линия действия которого лежит в горизонтальной плоскости, а направление линии действия в общем случае произвольно и определяется параметрами векторов Fx, Fy и fjlz. Чувствительность датчика к любой произвольно направленной горизонтальной силовой компоненте будет одинакова в том случае, если момент сопротивления поперечного сечения перемычек относительно любой произвольно направленной горизонтальной оси будет одинаков. Этим свойством обладают поворотно-симметричные фигуры, у которых главный порядок поворотной симметрии равен бесконечности. К таким фигурам относится и кольцо. Следовательно, чувствительность датчика, выполненного с кольцевой формой поперечного сечения перемычек, будет одинакова к любой произвольно направленной силовой компоненте. Кроме того, после наклейки тензорезисторов, вследствие их различной жесткости и погрешностей изготовления перемычек, чувствительности перемычек будут различны. Следовательно, уровни выходных сигналов измерительных каналов будут различны, что приведет к усложнению вторичной аппаратуры и снижению точности измерения. Для того чтобы устранить эти недостатки, необходимо выровнять и жесткости перемычек. С этой целью в предлагаемой конструкции у перемычек, обладающих большей жесткостью, возможно с помощью разверток уменьшить площадь поперечного сечения и тем самым выравнять жесткости всех перемычек.
Силовую нагрузку, действующую на каждую перемычку, можно представить следующим образом (жесткость всех перемычек одинакова):см.табл.
где Kn K22 Кзз - ;
К42
I
- Кб1 - п , Кбб о-
2п24 -n -r2(1 +/0
Р Х1
8Ш((1-1))
к16 --гг-т;-;|К26| ;
С08(р(1-1))
П Г0
I K34l
1
г0-сов((1-1))
К35
1
Го.8111((1-1))
IK46lW (if(i-i));
| |-2 ТмГ81п 1Г |-1 :
n - количество перемычек;
r0 - радиус колец;
IP - полярный момент инерции перемычки относительно ее вертикальной оси;
lz - осевой момент инерции перемычки относительно оси L;
I - высота перемычки.
Для определения шести неизвестных силовых компонент необходимо и достаточно располагать шестью независимыми уравнениями вида
UBNXJ f) (Fx, Fy, Fz, MX, My, Mz), где UBbixj - изменение выходного напряжения j-ro тензорезистора под воздействием
Fx, Fy, FZ, MX, My, Mz.
Как видно из таблицы, для того чтобы получить необходимое количество уравнений требуемого вида, достаточно на каждой перемычке измерить относительные деформации, вызванные вертикальной и горизонтальными силовыми компонентами. С этой целью на каждой из трех перемычек необходимо разместить, как минимум, два не связанных друг с другом рабочих тензорезистора растяжения-сжатия.
Тензорезистор будет чувствителен только к вертикальным силовым компонентам в том случае, если его главная ось параллельна вертикальной оси перемычки. Тензорезистор будет чувствителен только к горизонтальным силовым компонентам в том случае, если его главная ось образует с вертикальной осью перемычки угол, равны1 45°. Угол, при котором чувствительность тензорезистора к вертикальным и горизонтальным силовым компонентам будет одинакова, определяется из условия
Јг - Јв ;
где fc r , ЕВ относительные деформации тензорезистора при воздействии соответственно горизонтальных и вертикальных силовых компонент.
Откуда
Ј ( cos а-/г sin а)
f ((f-a)-sin(f-a),
где о - напряжение в материале перемычки;
Е - модуль упругости материала перемычки
(см. Проектирование датчиков для измерения механических величин/Под ред. Е.П.Осадчего. - М.: Машиностроение, 1979. С. 75-76; Сопротивление материалов/Под ред. Г.В.Писаренко. - К.: Вйща школа, 1986, с.215-217).
После несложных преобразований пол- учим
« arctg(v2+1V2+.
Технология изготовления предлагаемого датчика практически не отличается от общеизвестной технологии изготовления тензорезисторных датчиков силы (см., например, Проектирование датчиков для измерения механических величин/Под ред.
Е.П.Осадчего. - М.: Машиностроение, 1979, с. 150-178), а выбор материала упругого элемента, тензорезисторов и связующего производится на основании требований технического задания.
Формула изобретения
Многокомпонентный датчик силы, содержащий два соосно расположенных жестких кольца, соединенных между собой размещенными равномерно по периметру
по крайней мере тремя перемычками, на внутренней и внешней поверхностях которых размещены тензорезистры, отличающийся тем, что, с целью упрощения датчика за счет уменьшения количества рабочих тензорезисторов и увеличения чувствительности, поперечное сечение каждой перемычки выполнено в виде поворотно- симметричного кольца, на внутренней и внешней поверхностях каждой перемычки
размещено по крайней мере по одному тен- зорезистору растяжения сжатия, при этом угол а. между продольной осью перемычки и главной осью каждого из двух размещенных на ней тензорезисторов выбран из соотношения
a arctg(W2+1V2+
где //- коэффициент пуассона материала 50 упругого элемента
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки многокомпонентных датчиков сил и моментов и устройство его реализующее | 2017 |
|
RU2637721C1 |
| Многокомпонентный датчик силы | 1989 |
|
SU1677537A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| ТЕНЗОМЕТРИЧЕСКИЕ ВЕСЫ | 2015 |
|
RU2599906C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ МНОГОСВЯЗНОЙ ТЕНЗОРЕЗИСТОРНОЙ СИСТЕМЫ | 1995 |
|
RU2087856C1 |
| Шестикомпонентные аэродинамические весы | 1961 |
|
SU152117A1 |
| ТЕНЗОМЕТРИЧЕСКИЕ ВЕСЫ | 2005 |
|
RU2287783C1 |
| Многокомпонентные тензометрические весы | 2019 |
|
RU2717746C1 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК СИЛОВЫХ ВОЗДЕЙСТВИЙ | 2003 |
|
RU2251670C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
ЈLI -A
r
. C;1:OU
