Предмет изобретения
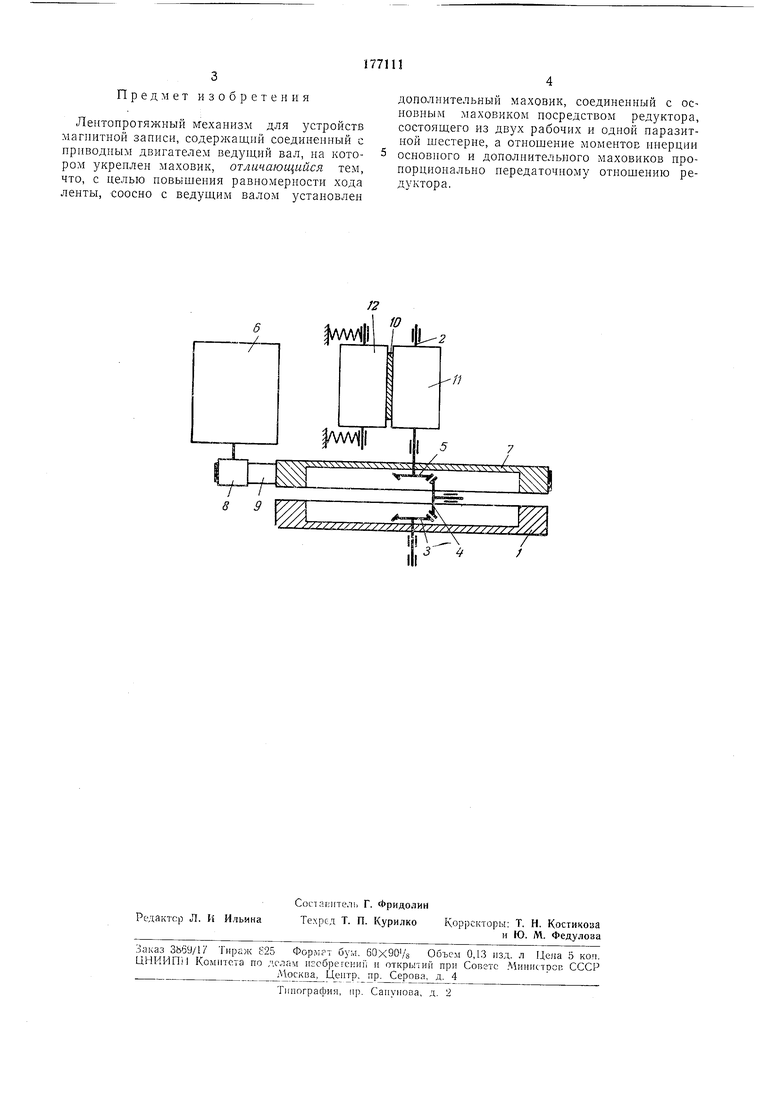
Лентопротяжный механизм для устройств магнитной записи, содержащий соединенный с прнводным двигателем ведущий вал, на котором укреплен маховик, отличающийся тем, что, с целью новынления равномерности хода ленты, соосно с ведущим валом установлен
дополнительный маховик, соединенный с основным маховиком посредством редуктора, состоящего из двух рабочих и одной паразитной шестерне, а отношение моментов инерции основного и дополнителыюго маховиков пропорционально нередаточному откощению редуктора.
|ЛЛМ|| t-2
|ЛЛМ|1
П
Z
77У/,УЛ
/У///////
fFY
