Toporo движение кривоши11у 9 передается через Храпсвую муфту обгона. Ведущая собачка 17 ее установлена «а рычаге 18, жестко связалном с шестерней 7. Храповик 19 (.ведомая деталь муфты) установлен неподвижно на валу 8, т. е. через вал также жестко связан с кривошипом 9. На валу 8 установлен диск 20, жестко связанный с храпо ви«о.м и снабженный пазами 21 и 22, а на валу 5 - рычаг 23 с цилиндрическим р1а|бочим участком 24, взаимодействующим с назааги.
Привод работает следующим образом.
При включении электромагнита 1 его якорь 2 поворачивается и через тягу 3, рычаг 4, вал 5, колесо б, шестерию 7 приводит в движение но часовой стрелке (направление движения звеньев на чертежах ноказано стрелка:ми) рычаг 18 с собачкой 17, а через нее - храповик 19, вал 8 и, следовательно, кривощип 9.
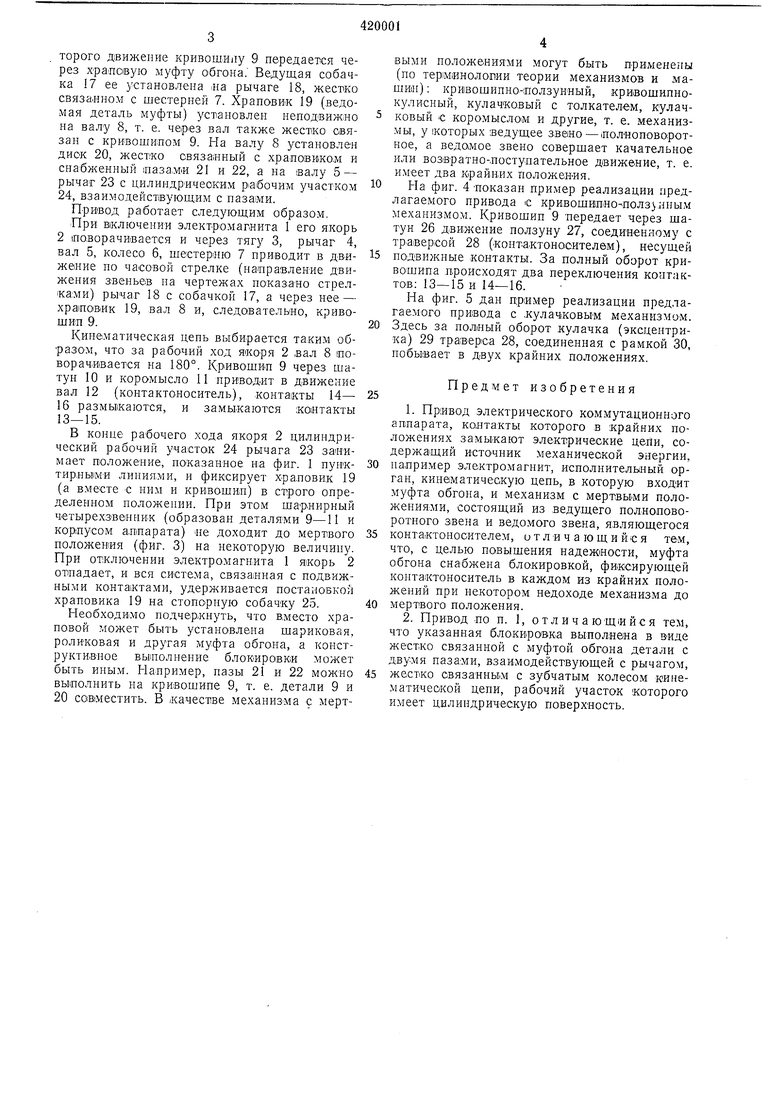
Кинематическая цепь выбирается таким образОМ, что за рабоч.нй ход якоря 2 вал 8 поворачивается на 180°. Кривощип 9 через шатун 10 и коромысло И приводит в движение вал 12 (контактоноситель), контакты 14- 16 размыкаются, и замыкаются контакты 13-15.
В конне рабочего хода якоря 2 цилиндрический рабочий участок 24 рычага 23 заиимает положение, показанное на фиг. I пунктирными линиями, и фиксирует храловик 19 (а вместе с ним и кривошип) в определенном положении. При этом шарнирный четырехзвенник (образован деталями 9-11 и корпусом аппарата) -не доходит до мертвого положения (фиг. 3) на некоторую величину. При отключении электромагнита 1 якорь 2 отпадает, и вся система, связанная с подвижными контактами, удерживается постановкой храповика 19 на стопорную собачку 25.
Необходимо подчеркнуть, что в,место храповой может быть установлена шариковая, роликовая и другая муфта обгона, а конструктивное выаюлнение блокировки может быть иным. Например, пазы 21 и 22 можно выполнить на кри.вошипе 9, т. е. детали 9 и 20 совместить. В качестве механизма с мертвыми положениями могут быть применены (по терминолОПии теории механизмов и машин) : кривошинно-ползунный, кривощипнокулисный, кулачковый с толкателем, кулачковый с коромыслом и другие, т. е. механизмы, у (которых ведущее звено-полноповоротное, а ведомое звено соверщает качательное или возвратно-поступательное движение, т. е. имеет два крайних положения.
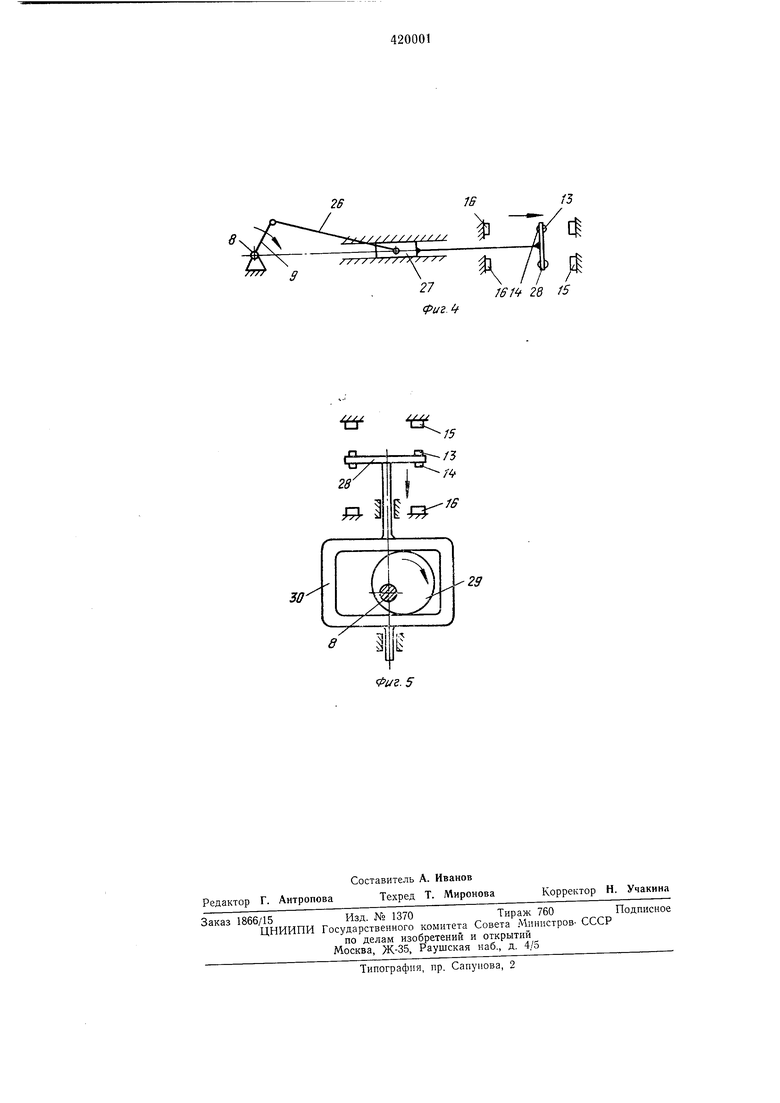
На фиг. 4 показан пример реализации предлагаемого привода € кривошипно полз нным механизмом. Кривошип 9 передает через щатун 26 движение ползуну 27, соединенному с тр.аверсой 28 (контактоносителем), несущей
подвижные контакты. За полный оборот кривошипа происходят два переключения контактов: 13-15 и 14-16.
На фиг. 5 дан пример реализации предлагаемого привода с кулачковым механизмом.
Здесь за полный оборот кулачка (эксцентрика) 29 траверса 28, соединенная с рамкой 30, побывает в двух крайних положениях.
Предмет изобретения
1.Привод электрического коммутационного аппарата, контакты которого в крайних положениях замыкают электрические цейи, содержащий источник механической энергии,
например электромагнит, исполнительный орган, кинематическую цепь, в которую входит муфта обгона, и механизм с мертвы-ми положениями, состоящий из ведущего полноповоротного звена и ведомого звена, являющегося
контактоносителем, отличающийся тем, что, с целью повышения надежности, муфта обгона снабжена блокировкой, фиксирующей контактоноситель в каждом из крайних положений при некотором недоходе механизма до
мертвого положения.
2.Привод по п. 1, отличающийся тем, что указанная блокировка выполнена в виде жестко связанной с муфтой обгона детали с двумя пазами, взаимодействующей с рычагом,
жестко связанным с зубчатым колесом кинематической цепи, рабочий участок которого имеет цилиндрическую поверхность.
8
25
Фиг.1 /-/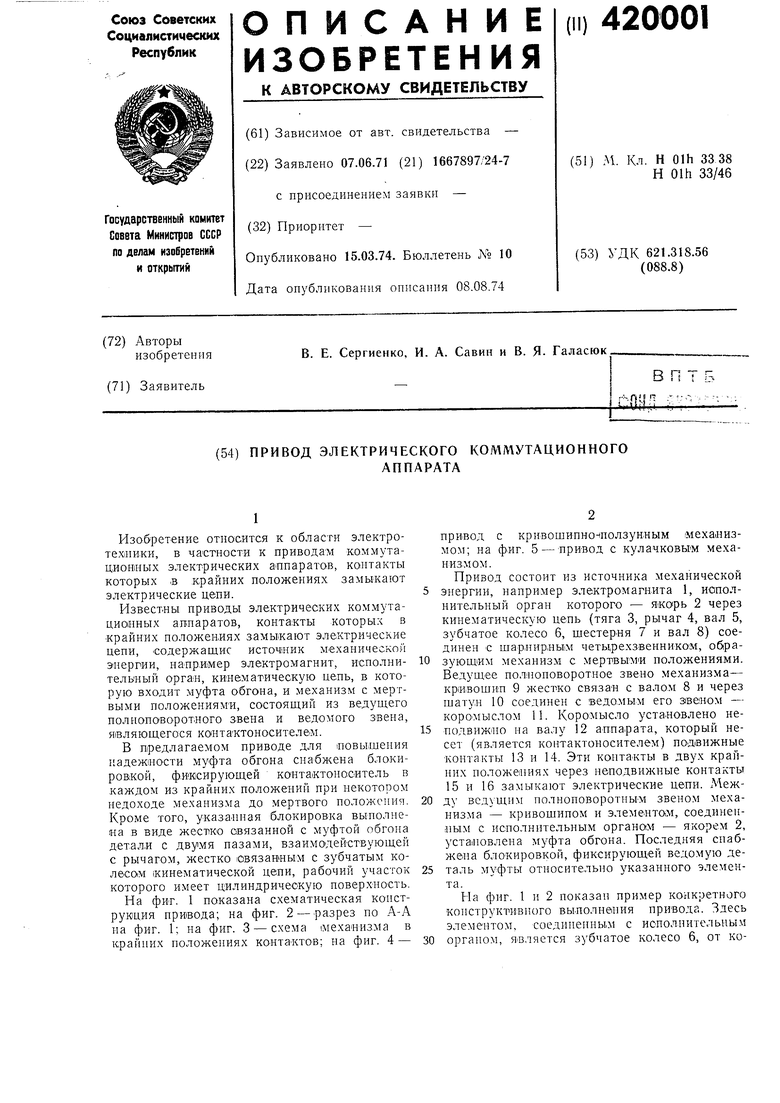
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ЭЛЕКТРИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 1973 |
|
SU389559A1 |
| Привод электротехнического аппарата | 1975 |
|
SU652622A1 |
| ПРИВОД ВЫКЛЮЧАТЕЛЯ | 1970 |
|
SU273314A1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091249C1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091251C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ОБГОННОЙ МУФТОЙ | 1966 |
|
SU184033A1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091250C1 |
| СПОСОБ РАБОТЫ РУЧНОГО ИМПУЛЬСНОГО РЕГУЛИРУЕМОГО ПРИВОДА И РУЧНОЙ ИМПУЛЬСНЫЙ РЕГУЛИРУЕМЫЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2011 |
|
RU2484350C2 |
| Способ управления электрическим аппаратом | 1974 |
|
SU526962A1 |
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
Ш
/2
//
1Б
/5
/H
/jL
/M
27 Фиг.
26 /5
15
