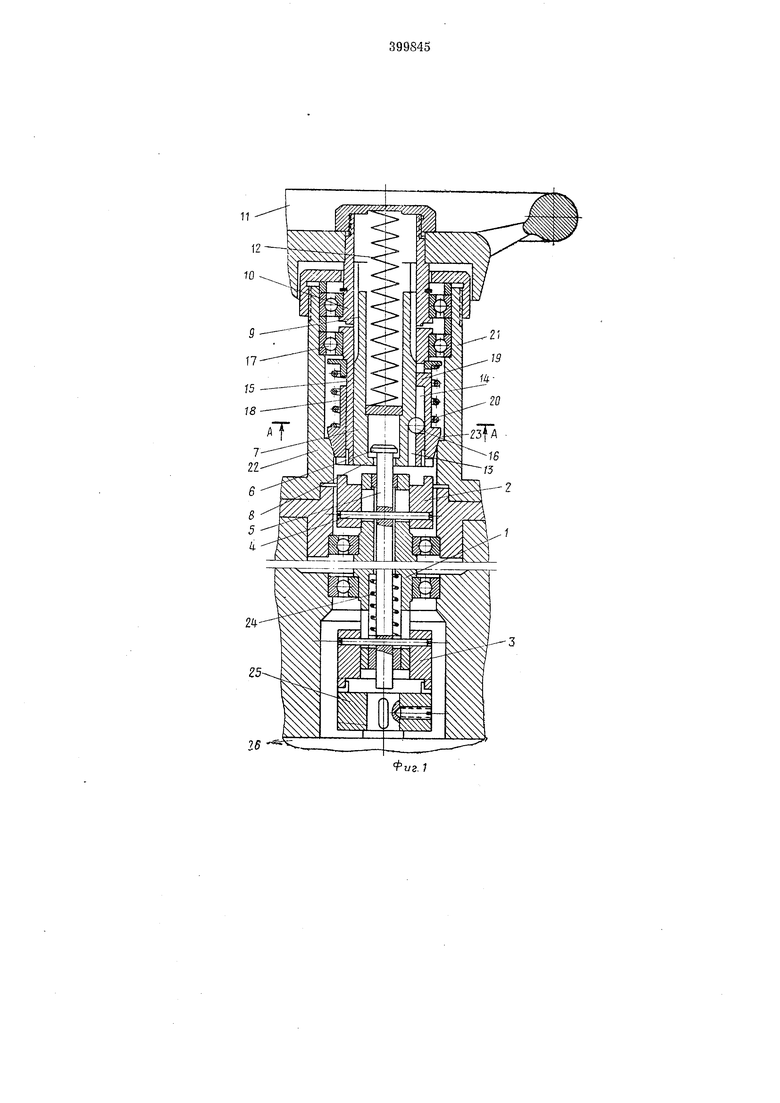
Контакт корпуса 21 с полумуфтой 18 этро«схОлЧит по коничеокой noBepxnioicTH 22 iKopnyса и койячеокой поверхиосги 23 Полумуфты. Пружина 24, рас1положе1нная внутри вала 1 В|0здей ствует на Полумуфты 2 и 3 так, чтобы полумуфта 3 сцеплялась с полумуфтой 25, установлен ной на валу электродвигателя 25.
На фшг. 1 изображено положение меха«изма, 0Гда включен основной привюд от электродвигателя 26. При этом полумуфты 3 и 25 сцеплены, т. с. находятся в рабочем (положении, а полумуфты 2 и 18 - расцеплены, т. е. находятся в холостом полол е-нии. При вращении маховика И в любую сторону вместе с ним поворачивается ступица 10 и шпицдель 7, заставляя шарш 16 взаимодействовать с одной из сторон (в зависимооти от направления вращения) тазов 13 и 14.
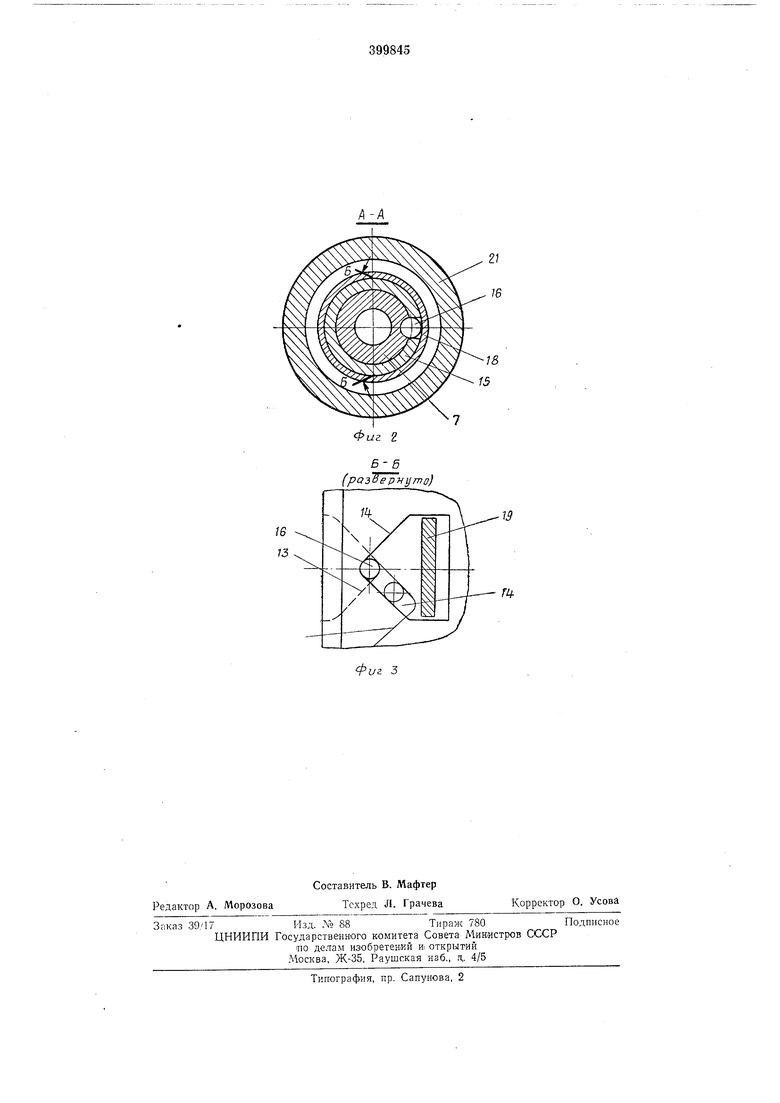
Поскольку полумуфта 18 прнжата своей функциональной поверхностью 23 к фрикщиоиной поверхности 22 21, она (полумуфта 18) при помощи выступа 19 препятствует провороту промежуточной втулки 15 и шпиндель 7, поворачиваясь, вынужден (;фиг. 3) под воздействием 16, взаимодействующего с пазами 13 и 14, перамещается вдоль оси, сжимая пружину 12 и увлекая за собой (нри помощи выступа 8, головки 6 тяги 5 и ШТИ1ФТОВ 4) ведомые пОЛумуфты ,2 и 3. При этом, полумуфта 3 выходит из зацепления с полумуфтой 25 электродвигателя 26, а затем полумуфта 2 сцепляется с полумуфтой 18. Если кулачки полумуфт 2 и 18 при их сближении не попали в сцепление, а сошлись внешними торцами, то полумуфта 2, продолжая перемещаться вдоль оси, воздей|ствует на полумуфту 18, так, что пружина 20 сожмется и фрикционная поверхность 24 полумуфты 18 отойдет от поверхности 22 корпуса 21.
Полумуфта 18 окажется расторможенгюй и начнет проворачиваться вл1есте с промежуточной втулкой 15 и вали1ком 7 до тех пор, Пока кулачки полумуфты 2 и 18 не войдут в сцепление.
После сцепления полумуфт 2 и 18 осевое движение шпинделя 7, и следовательно, полумуфты 2 будет продолжаться до тех лор, nOiKa полумуфта 2, вощедшая в сцепление с нолумуфтой 18, не .отожмет последнюю от корпуса 22, освободив ее от торлюжен-ия
фри;ициоянымн поверхлостями 22 и 23.
Дальнейшее вращение маховика 11 будет передаваться через стушаду 10 шпиндель 7, шарик 16, прОМежуточную втулку 15, планку 19, полумуфты 18 и 2 на вал 1 и далее иополиительнюму устройству.
После освобождения махови1ка 11 от крутящего момента пружины 12, 20 и 24 возвращают механизм .переключения в первоначальное положение.
Предмет изобретения
Механизм переключения приводов, содержащий корпус, две ведущие полумуфты, одна из которых подпружинена, и расположенные между ними две аксиально подвижные ведомые полумуфты, связанные друг с другом посредством тяги, установленной в отверстии
привОдного вала, отличающийся тем, что, с целью расширения диапазона использования и повышения надежности в работе, он снабл ен расположенными В1нутри корпуса промежуточной втул;кой и подпружиненным а ксиалыно подвижным Щ1нинделем, связанным с одним из приводов и имеЮЩи.м профильный паз, взаимодействующий посредством шарика с ответным пазом промежуточной втулии, огра.ниченной от осевого перемещения и сочлепенной с ведущей подпружиненной полумуфтой с помощью закрепленной во втулке планки.
25
Фиг Z
Б- Б (разВер-нутпо)

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поперечной резки труб | 1981 |
|
SU988469A1 |
| Станок для обработки оптических деталей | 1986 |
|
SU1340998A1 |
| ТОКАРНАЯ СИЛОВАЯ ГОЛОВКАт~—^~"I | 1972 |
|
SU346033A1 |
| Станок для обработки оптических деталей | 1983 |
|
SU1151430A2 |
| ПРИВОД ТРУБОПРОВОДНОЙ ЗАПОРНОЙ АРМАТУРЫ | 1998 |
|
RU2132990C1 |
| Рельсосверлильный станок | 1989 |
|
SU1712517A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| МОТОРНОЕ СУДНО В.С.ГРИГОРЧУКА | 1998 |
|
RU2132797C1 |
| Зажимное устройство и станок, оборудованный таким устройством | 2020 |
|
RU2759352C1 |
| СИСТЕМА ЗАРЯЖАНИЯ АВТОМАТИЧЕСКОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2003 |
|
RU2231728C1 |