Фиг.1
Изобретение относится к области ранспортного машиностроения, а именно к механизмам поворота гусеничных машин.
Известны механизмы поворота гусеничных машин, содержащие два бортовых рехзвенных дифференциальных механизма, первые звенья которых связаны с ведущими колесами машины, вторые - с коробкой передач, и третьи - друг с другом через паразитную шестерню и с двигателем через гидростатический регулируемый вариатор и дополнительную передачу. Эти ме- ханизма имеют низкий КПД и большие габариты из-за передачи на определенных режимах поворота всей мощности двигателя через гидростатический вариатор.
Наиболее близким по технической сущности к заявляемому механизму поворота является механизм поворота, дополнительная передача которого выполнена в виде планетарного ряда, первое звено которого- соединено с двигателем, второе - с гидростатическим вариантом, а третье - с бортовыми дифференциальными механизмами через две попеременно включаемые муфты, одна из которых снабжена паразитной шестерней.
Недостатком известного механизма поворота является низкий КПД при прямолинейном движении машины, т.к. вал гидромотора .имеет максимальную угловую скорость и в замкнутом контуре дополнительной передачи циркулирует значительная мощность, которая перегружает элементы механизма поворота и уменьшает КПД всей трансмиссии в целом.
Целью изобретения явдляется повышение КПД и сокращение габаритов механизма,
Указанная цель достигается тем, что дополнительная передача выполнена в виде планетарного ряда, первое звено которого соединено с гидростатическим вариатором, второе - с бортовыми дифференциальными механизмами, третье - с двигателем через две попеременно включаемые муфты, одна из которых снабжена паразитной шестерней, а болкировочная муфта, соединяя два звена планетарного ряда, блокирует его, соединяя тем самым вал гидромотора с бортовыми дифференциальными механизмами.
Сопоставительный анализ с прототипом показывает, что заявляемый механизм поворота отличается наличием новой муфты и новыми связями между элементами механизма поворота. Таким образом, заявляемое устройство соответствует критерию изобретения- новизна. При изучении других известных технических решений в данной области техники признаки, отличающие заявляемое изобретение от прототипа, не были выявлены и потому они обеспечивают заявляемому техническому решению соответствие критерию существенные отличия. На фиг. 1 показана кинематическая схема предлагаемого механизма поворота; на фиг. 2 - зависимость радиуса поворота от угловой скорости вала гидромотора.
0 Механизм поворота содержит гидрообъемный вариатор, включающий регулируемый .гидронасос 1 и нерегулируемый гидромотор 2, два бортовых трехзвенных дифференциальных механизма, которые од5 ними одноименными звеньями 3 и 4 связаны с выходным валом 5 коробки передач 6, вторыми одноименными звеньями 7 и 8 связаны через бортовые передачи 9 и 10 с ведущими колесами 11 и 12, третьи звенья 13
0 и 14 связаны между собой зубчатыми передачами 15 и 16, обеспечивающими их вращения в противоположные стороны с равными по величине угловыми скоростями, и с двигателями гидростатическим вариато5 ром через дополнительную передачу в виде планетарного ряда с двумя степенями свободы, который одним звеном 17 связан с валом гидромотора 2 с помощью зубчатой передачи 19, вторым звеном 18 - с третьими .
0 звеньями 13 и 14 бортовых дифференциальных механизмов, третьим звеном 20 - с валом двигателя 21 с помощью двух муфт 22 и 23 и зубчатых передач 24 и 25, обеспечивающих реверс звена 20, а блокировочная
5 муфта 26, соединяя два звена 13 и 17, блокирует планетарный ряд, обеспечивая соединение вала гидромотора 2 с звеньями 13 и 14 бортовых дифференциальных механизмов.
0Механизм поворота работает следующим образом.
При включенной муфте 26 и отключенных муфтах 22 и 23 дополнительная передача работает в режиме полнопоточной
& гидрообъемной передачи, осуществляя прямолинейное движение и поворот гусеничной машины с большими- радиусами поворота.. Минимальный радиус поворота при этом определяется установочной мощностью гид0 ромашин и может быть в 1,5..,3 раза больше минимального необходимого радиуса поворота R2 (см. фиг. 2). При повороте гусеничной машины с малым радиусом поворота включается муфта 22 или 23, в зависимости
5 от направления поворота, и отключается муфта 26. При этом дополнительная передача становится двухпоточной и угловая скорость вапз гидромотора 2 меняется от сУмакс до -однако, а радиус поворота от RI до R2 (см.
фиг. 2). Чтобы переключение осуществить без разрыва потока мощности, зубчатые передачи 19, 24, 25 выбираются такими, чтобы при максимальной угловой скорости вала гидромотора 2 угловые скорости звеньев 18 и 20 по величине были равны.
Предложенный механизм поворота дает существенный выигрыш в установочной мощности гидромашин, Установочная мощность гидромашин равна
N 1
No ч
I KI +2 где К - параметр планетарного ряда;
No - установочная мощность гидромашин в механизме поворота аналога.
Тогда как в механизме поворота установочная мощность гидромашин равна
N 2 No (для всех К).
Также КПД заявляемого механизма поворота выше из-за того, что при прямолинейном движении вал гидромотора
остановлен и в дополнительной передаче при этом нет циркуляции мощности.
Формула изобретения
Механизм поворота гусеничной машины, содержащий два бортовых трехзвенных дифференциальных механизма, первые звенья которых связаны с ведущими колесами машины, вторые - с коробкой передач, а
0 третьи - друг с другом через паразитную шестерню и с двигателем через гидростатический вариатор и дополнительную передачу, выполненную в виде планетарного ряда, отличающийся тем, что, с целью
5 повышения КПД механизма поворота и уменьшения его габаритов, первое звено планетарного ряда соединено с гидростатическим вариатором, второй - с бортовыми дифференциальными механизмами, третье
0 - с двигателем через две попеременно включаемые муфты, а блокировочная муфта установлена между валом гидромотора и звеньями бортовых дифференциальных механизмов.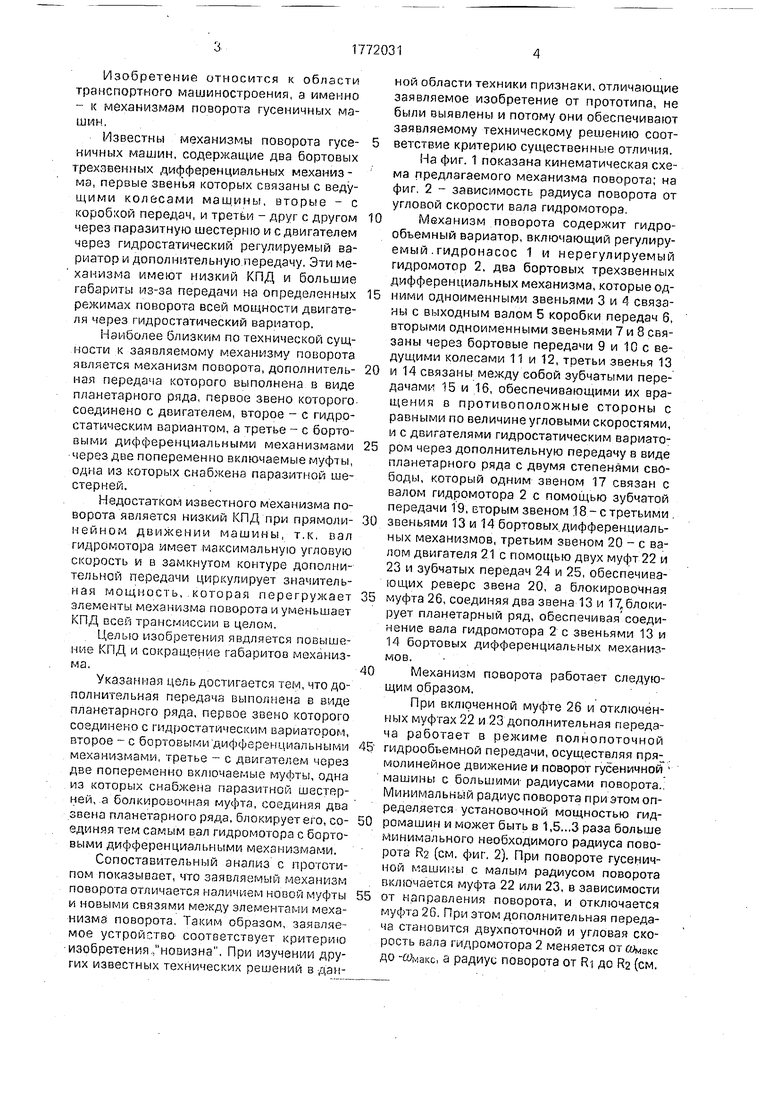

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поворота гусеничной машины | 1973 |
|
SU491508A1 |
| Механизм поворота гусеничной машины | 1987 |
|
SU1527071A1 |
| ВЫСОКОМОМЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2007 |
|
RU2347966C1 |
| Трансмиссия гусеничной машины | 1988 |
|
SU1602791A1 |
| Трансмиссия гусеничной машины | 1988 |
|
SU1527072A1 |
| Трансмиссия гусеничной машины | 1984 |
|
SU1162628A1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1991 |
|
RU2031808C1 |
| БЕССТУПЕНЧАТЫЙ МЕХАНИЗМ ПОВОРОТА ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2298505C2 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1991 |
|
RU2037443C1 |
Изобретение предназначено для управления движением гусеничной машины. Механизм поворота содержит гидрообъемный вариатор, включающий гидронасос 1 и гидромотор 2, два бортовых трехзвенных диф- ференц.иальных механизма, которые одними одноименными звеньями 3 и 4 связаны с выходным валом 5 коробки 6 передач, вторыми одноименными звеньями 7 и 8 связаны через бортовые передачи 9 и 10 с ведущими колесами 11 и .12, третьи звенья 13 и 14 связаны между собой зубчатыми передачами 15 и 16, обеспечивающими их вращение в противоположные стороны с равными по величине угловыми скоростями, и с двигателем и гидростатическим вариатором через дополнительную передачу в виде планетарного ряда с двумя степенями свободы, который одним звеном 17 связан с валом гидромотора 2 с помощью зубчатой передачи 19, вторым звеном 18 - с третьими звеньями 13 и i4 бортовых дифференциальных механизмов, третьим звеном 20 - с оа1- лом двигателя с помощью двух муфт 22 и 23 и зубчатых передав 24 и 25; обеспечивающих реверс звена 20, а блокировочная муфта 26, соединяя два звена 13 и 17, блокирует планетарный ряд.обеспечивая соединение вала гидромотора 2 с звеньями 13 и 14. 2 ил.
У
| Механизм поворота гусеничной машины | 1973 |
|
SU491508A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
