Изобретение относится к транспортному машиностроению, а именно к механизмам поворота гусеничных машин.
Цель изобретения - снижение габаритов механизма поворота за счет снижения потребной установочной мощности гидромагаин гидрообъемной передачи.
На чертеже показана кинематическая схема Механизма поворота.
Механизм поворота гусеничной машины содержит два суммирующих планетарных ряда, Первые одноименные звенья 1 и 2 которых связаны с ведущими колесами гусеничной, машины, вторые одноименные звенья 3 и 4 через коробку 5 Передач связаны с валом 6 двигателя, а третьи одноименные звенья 7 и 8 снабжены тормозами 9 и 10 м связаны с полуосями И и 12 простого симметричного дифференциала 13, у которого передаточное отношение ежду полуосями и 12 равно минус единице. .Ведуп1ее звено 14 симметричого дифференциала 13 связано с третьим звеном 15 трехзвенного планетарного механизма. При этом передаточные отношения от полуосей 11 и 12 к звеньям 7 и 8 выбираются равными по абсолютной величине. Простой симметричный дифференциал 13 выполнен цилиндрическим. Солнечная шестерня 16 трехзвенного планетарного механизма через гидрообъемную переачу 17, а эпициклическая шестерня 18 упомянутого механизма непосредственно связаны с валом 6 двигателя. Простой симметричный цилиндрический дифференциал 13 и трехзвенный планетарный механизм вьшолнены с общим звеном (водилом) 19.
Механизм поворота гусеничной машины работает следующим образом.
При прямолинейном движении включена передача в коробке 5 передач, звено 16 трехзвенного планетарного Механизма, связанное с гидрообъемной Передачей 17, имеет максимальную угловую скорость одного знака, полуоси 11 и 12 простого симметричного цилиндрического дифференциала 13 кинематически остановлены, следовательно, звенья 7 и 8 суммирующих планетарных рядов Леподвижны, угловые скорости звеньев 1 и 2 одинаковы, что позволяет путем одновременного включения тормозов 9 и 10
0
5
0
5
0
5
0
5
0
5
обеспечить устойчивое прямолинейное движение гусеничной машины.
При повороте вправо тормоз 10 выключен, после чего начинается управление гидрообъемной передачей 17. Вращение от гидрообъемной передачи 17 передается через трехзвенный планетарный механизм ведущему звену 14 простого симметричного цилиндрического дифференциала 13, что приводит к врапению полуоси 12, которая связана со звеном 8 суммирующего планетарного ряда, что приводит к рассогласованию угловых скоростей звеньев 1 и 2 и связанных с ними ведущих колес машины. Вследствие изменения угловой скорости гидрообъемной передачи I7 скорость звена 19 изменяется до величины, обеспечивающей необходимую угловую скорость гусеничной машины.
При повороте влево выключен тормоз 9. Вращение от гидрообъемной передачи 17 через трехзвенный планетарный механизм передается ведущему звену 14 простого симметричного цилиндрического дифференциала 13, что приводит к вращению полуоси 1, которая связана со звеном 7 суммирующего планетарного ряда, к рассогласованию угловых скоростей звеньев 1 и 2 и связанных с ними ведуатх колес машины. Вследствие изменения угловой скорости гидрообъемной передачи 17 скорость звена 19 изменяется до величины, обеспечивающей необходимую угловую скорость гусеничной машины.
Формула изобретения
Механизм поворота гусеничной машины, содержащий два суммирующих планетарных ряда, первые одноименные звенья которых связаны с ведущими колесами машины, вторые одноименные звенья связаны через коробку передач с валом двигателя, простой симметричный цилиндрический дифференциал, полуоси которого связаны с третьими одноименными звеньями планетарных рядов, гидростатическую передачу, насос Которой связан с валом двигателя, о тли ч ающийс я тем, что, с целью уменьшения габаритов механизма поворота за счет снижения установочной мощности гидромашин, он снабжен трехзвенным пла 15270716
нетарн м механизмом, первое звено линдрического дифференциала, третье которого связано с гидромотором с валом двигателя, при этом полуоси гидростатической передачи, второе симметричного дифференциала снабже- эвено - с водилом симметричного ци- ны тормозами.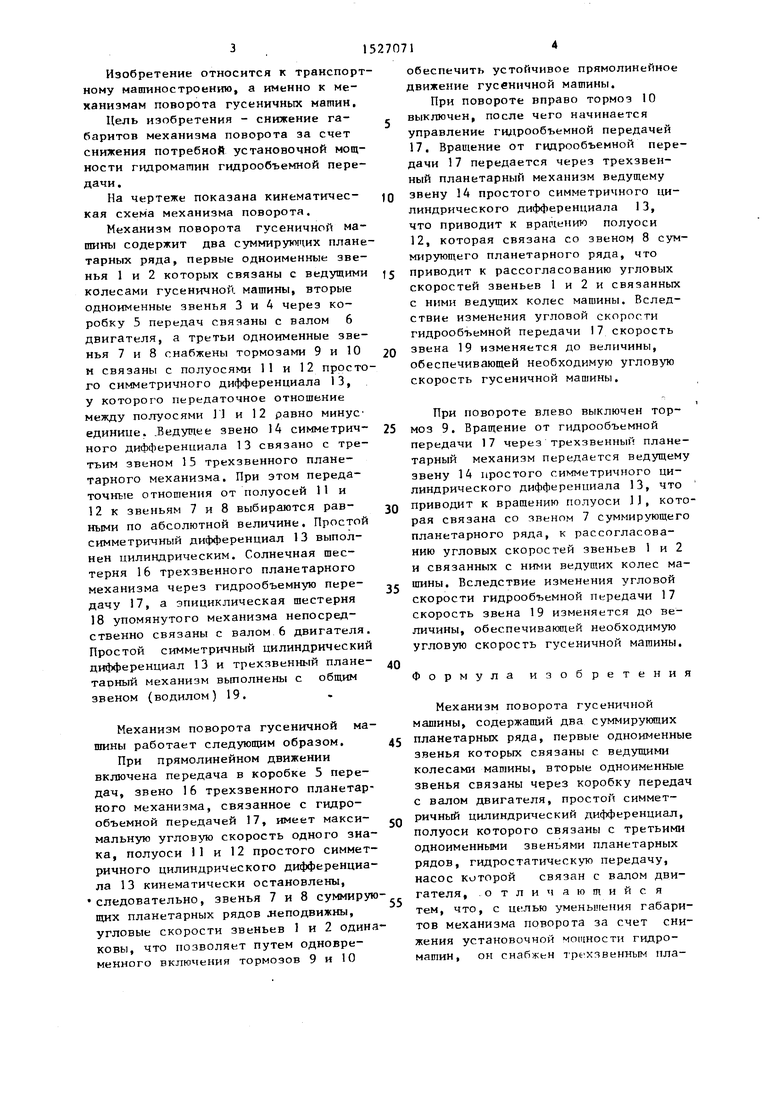
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поворота гусеничной машины | 1989 |
|
SU1682232A1 |
| Механизм поворота гусеничной машины | 1987 |
|
SU1532410A1 |
| Трансмиссия гусеничной машины | 1984 |
|
SU1162628A1 |
| Гидромеханическая трансмиссия транспортного средства | 1975 |
|
SU598781A1 |
| Гидромеханическая трансмиссия транспортного средства | 1975 |
|
SU610689A1 |
| Механизм поворота гусеничной машины | 1988 |
|
SU1544626A1 |
| Трансмиссия гусеничной машины | 1988 |
|
SU1602791A1 |
| Трансмиссия гусеничной машины | 1990 |
|
SU1770198A2 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
Изобретение относится к транспортному машиностроению и может быть использовано в трансмиссиях гусеничных машин для обеспечения поворота. Целью изобретения является уменьшение габаритов механизма поворота за счет уменьшения потребной установочной мощности гидромашин гидрообъемной передачи. Механизм поворота гусеничной машины содержит два суммирующих планетарных ряда, звенья 1 и 2 которых связаны с ведущими колесами машины, звенья 3 и 4 через коробку 5 передач связаны с валом 6 двигателя, а звенья 7 и 8 снабжены тормозами 9 и 10 и связаны с полуосями 11 и 12 простого симметричного цилиндрического дифференциала 13. Звено 14 дифференциала 13 связано со звеном 15 трехзвенного планетарного механизма. Солнечная шестерня 16 трехзвенного планетарного механизма через гидрообъемную передачу 17, а эпициклическая шестерня 18 планетарного механизма непосредственно связаны с валом 6 двигателя. Простой симметричный цилиндрический дифференциал 13 и трехзвенный планетарный механизм выполнены с общим водилом 19. 1 ил.
| Антоноп А.С | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ч.Ц | |||
| Кчистр кп.ия и расчет | |||
| - М.: Вгнчипдат, 1974, рис | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
