Изобретение относится к медицинской технике, а именно к транспортным средствам для реабилитации инвалидов.
Известно транспортное средство, приводимое за счет мускульных усилий пассажира, содержащее раму, ножной тормоз, шарнирно установленный ручной приводной полый рычаг, установленный на полом рычаге с возможностью перемещения и фиксации ползун, кинематически связанный с тягой движителя, механизм поворота, связанный с тягой поворота.
При использовании подобных органов управления транспортным средством в устройствах для л юдей с утрачен ной п одвижно- стью нижних конечностей возникнут трудности управления: тормозом - невозможно быстро затормозить без снятия хотя бы одной руки с рычага управления на рычаг
тормоза, а это увеличивает время включения тормоза из-за дополнительных движений, рассеивает внимание, и при экстренном торможении транспортное средство будет двигаться некоторое время без управления; механизмом поворота - особенно, если управляет транспортным средством человек с одной работоспособной рукой; реверсированием движением транспортного средства, что в известном транспортном средстве отсутствует.
Цель изобретения - упрощение управления и расширение функциональных возможностей.
Поставленная цель достигается тем, что все оперативные органы управления: тормоз, реверс, руль установки угла поворота рулевых колес, регулятор усилия тяги движителя - установлены на пустотелом рычаю
го, предназначенном для передачи усилия руки на ведущее колесо, и связаны с исполнительными механизмами и элементами следующим оброзом: торгчсл и реверс - гибкими тросикорыми тгами, проходящими внутри внутренней трубы полого рычага, на редуктор движителя; руль носорога колес в виде пустотелой рукоятки, надетой на внутреннюю рубу, -трубчатым рычагом, заканчивающимся конической шесперней, находящейся в зацеплении с другой конической шеаерней, связанной через винтовой механизм преобразования направления движения и цилиндрическую рейку с шестерней, взаимодействующей с рычагом по ворога колес, и лалее системой гяг и рычагов, на рулевые колеса; регулятор усилия гя vi движыеля, расположенный поверх полого рычага и имеющий Аиксагор установленного положения, - ибкой тягой, из редуктор движителя.
Такое техническое решение позволяет управлять коляской бе лишних движений, с малыми затратами времени, увеличивает функциональные возможности коляски. Кроме того, такая гансгрукция органа ручного упражнения инвалидной колгской дает возможность сосредоточить все управление па одном IM полых рычаюв, а число полых ручаюн сократить, прч необходимости до одною, запарлллепив управление, - это важно для людей, лишенных возможности самоетягепьно передвигаться и имеющих одну руху.
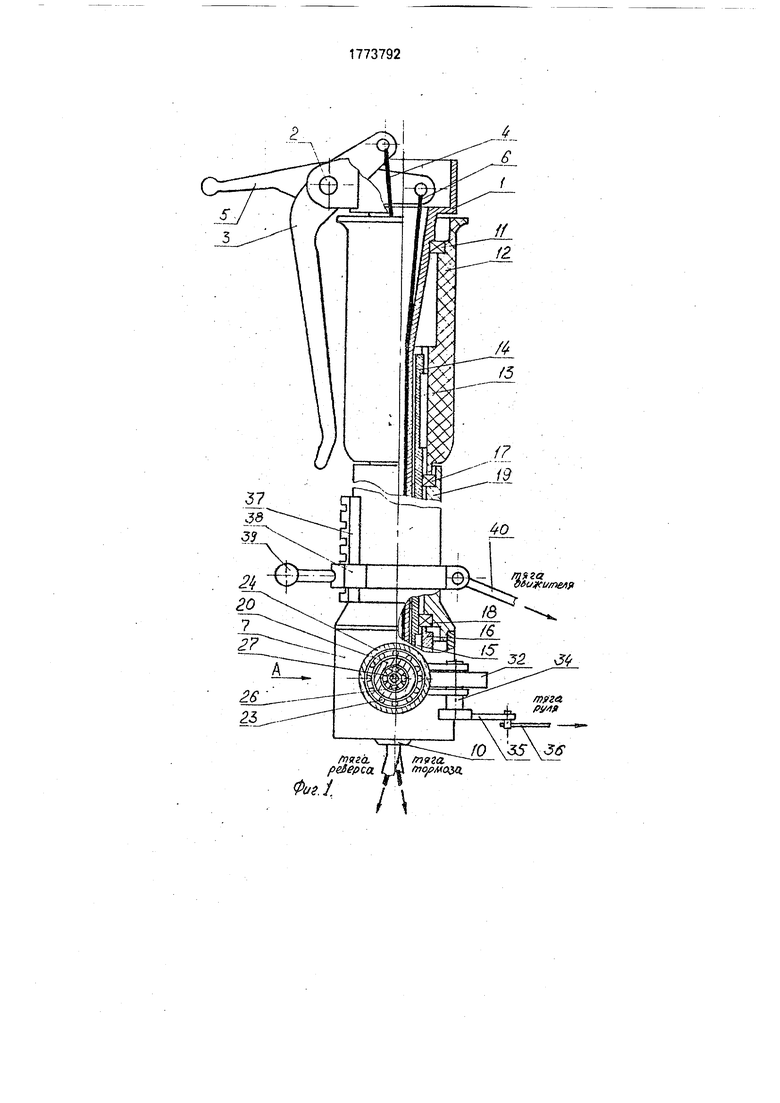
1 In фиг. 1 изображен праднй орган руч- HOio управления, вид со стороны сидения; на фиг, 2 - вид А на фиг. 1; nd фиг 3 вид Б на фиг. 2.
Орган ручного управления инвалидной коляской содержит внутреннюю трубу 1, на верхнем расширенном конце которой имеется ось 2, на которой установлены тормозной рычаг 3 с укрепленной на нем гибкой тросиковой тягой Л и рычаг 5 с гибкой тро- сиковой гягой б для управления устройством реверсирования. Нижний конец внутренней трубы 1 имеет резьбовую нарезку, с помошью которой укреплен в резьбовом отверстии корпуса 7, где зафиксирован от проворачивания специальной шайбой 8 с наружным и внутренним выступами, входящими в пазы в корпусе 7 и во внутренней трубе 1, и гайкой 9, поверх которой установлена шайба Юс двумя углублениями веере- дине для упора наружной части гибких тросиковых тяг 4 и 6. На внутреннюю трубу 1 напрессован подшипник 11, на который опирается рукоятка 12 руля поворота колес, соединенная шпонкой 13с трубчатым рыча- том 14, на конце которого на шпонке 15
установлена коническая шестерня 16. Трубчатый рычаг 14 на подшипниках 17 и 18 установлен внутри полого рычага 19, укрепленного на корпусе 7, а для предотвращения проворачивания рычага 19 в корпусе 7 сделано квадратное углубление и на торце рычага 19 имеется квадратный по периметру выступ, входящий в углубление корпуса 7; в корпус 7 запрессована труба 20, имею0 щая с широкого конца заглушку 21 и два поперечных соосных отверстия, а другой конец с двумя продольными прорезями установлен на подшипниках 22 и 23 в полой главной оси 24, имеющей прорезь и связан5 ной с рамой коляски. В трубе 20 на подшипниках 25 и 26 установлен резьбовой вал 27, у которого с одного конца - зубчатая коническая нарезка для связи с конической шес- т ернеи 16, а в середине - резьба, по которой
0 перемещается гайка 28, связанная установочными винтами 29 и 30 через прорези в трубе 20 с цилиндрической рейкой 31, свободно перемещающейся по трубе 20 и входящей в зацепление с шестерней 32,
5 связанной шпонкой 33 с поворотной осью 34, на которой установлен рычаг 35 с тягой 36 руля поворота колес. На полом рычаге 19 укреплена планка 37 с прорезями для фиксации положения ползунка 38 с рычажком
0 39, предназначенным для перемещения ползунка 38 по полому рычагу 19 и фиксации в нужном положении, К ползунку 38 прикреплена тяга 40, передающая усилие руки с рычага 19 на редуктор движителя.
5 При использовании органа ручного управления применяют следующие действия и движения руки, В исходном положении рукоятка 12 руля зажата в ладони человека, сидящего в коляске. Движитель включают в
0 работу колебательными движениями всего органа как рычага, вперед-назад. При этом усилие руки передается тягой 40 на редуктор движителя. Если необходимо затормозить, руки не снимают с рукоятки 12
5 руля, но разомкнутыми пальцами захватывают рычаг 3 тормоза и притягивают его к рукоятке 12. После торможения можно произвести реверсирование - отпускают рычаг 3 тормоза и подобным описанному способом
0 воэдейстоуют на рычаг 5 реверса. При этом и обоих случаях соответствующий гибкий тросик 4 или б передает усилие на соответствующие механизмы. Углом установки рулевых колес управляют поворотом рукоятки
5 12 вокруг своей оси вправо или влево, причем механизм привода рычага 35 поворота колес выполнен таким образом, что число оборотов рукоятки 12 в пределах угла поворота колес 150° зависит от соотношения параметров конических шестерен 16 и 27
исходя из удобства управления. Так, например, при сохранении усилия кисти руки человека на рукоятке 12 в пределах 0,1...0,3 кгс во всем диапазоне углов установки рулевых колес, т,е. 150°, передаточное отношение конических шестерней 16 и 27 должно быть 0,45, При этом необходимо совершить 2,5 оборота рукояткой 12. Чтобы уменьшить или увеличить крутящий момент при сохранении постоянной силы воздействия руки на полый рычаг в пределах 5 кгс при движении по ровной поверхности или по наклонной плоскости, регулируют тягу движителя, перемещая скользящую в полуобхвате кисть руки вниз по полому рычагу 19 до захвата рычажка 39 пальцами, а механизм фиксации ползунка 38 может быть выполнен одним из известных способов, но так, чтобы при нажатии на рычажок 39 происходила его расфиксация, затем продвигают ползунок 38 вверх или вниз по рычагу 19, меняя тем самым плечо рычага приложения тяги 40 - таким образом, не снимая руки с органа управления, а лишь совершая манипуляции на нем и с ним, осуществляют полное управление коляской.
Формула изобретения 1. Орган ручного управления инвалидной коляской, содержащий полый рычаг, шарнирно прикрепленный одним концом к главной оси, связанной с рамой, установленный на полом рычаге с возможностью перемещения и фиксации ползун, кинематически связанный с тягой движителя, механизмы торможения и поворота, связанные соответственно с тягой тормоза и с тягой поворота, отличающийся тем, что, с целью упрощения управления и расширения функциональных возможностей, он снабжен механизмом реверса с тягой, корпусом, трубой с продольными пазами, неподвижно связанной с корпусом и установленной с возможностью поворота внутри выполненной полой главной оси, имеющей прорезь, двуплечими рычагами с
осью, внутренней трубой, установленной в полом рычаге, первый конец которой неподвижно соединен с корпусом, а на втором конце закреплена упомянутая ось, на которой шарнирно установлены двуплечие рычаги, первые плечи которых свободны, а вторые плечи кинематически связаны посредством размещенных во внутренней трубе тяг с механизмами торможения и реверса, при этом полый рычаг жестко связан с корпусом.
2. Орган ручного управления поп. 1, о т- личающийся тем, что он дополнительно снабжен поворотной осью с рычагом, кинематически связанным с тягой поворота, охватывающим внутреннюю трубу трубчатым рычагом, установленным с возможностью вращения внутри полого рычага, рукояткой, установленной с возможностью вращения снаружи на втором конце внутренней трубы
и неподвижно скрепленной с первым концом трубчатого рычага, при этом механизм поворота включает в себя установочные винты, реечно-шестереночную передачу и две кинематически соединенные между собой конические шестерни, первая из которых закреплена на втором конце трубчатого рычага, а вторая, выполненная в виде резьбового вала, установлена с возможностью вращения в трубе, причем шестерня реечношестеренчатой передачи закреплена на поворотной оси и выполнена с возможностью взаимодействия через прорезь главной оси с выполненной цилиндрической рейкой, связанной посредством установочных винтов через продольные пазы трубы с гайкой, подвижно установленной на второй конической шестерне.
2
Фаг.1.
Вид Б Фиг 2.
гпка
ИМЯ
Фиг. 3.
Составитель А.Лебедев Редактор Г.Федото Техред М.МоргенталКорректор J/K Шмакова
Яякяз 3900ТиражПодписное .
ВНИИПИ Государственного комитета по изобретениям и открытийм при ГКНТ СССР 113035, Москва, Ж-35, Раушская изб., 4/5
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНВАЛИДНАЯ КОЛЯСКА | 2000 |
|
RU2212874C2 |
| СПОРТИВНО-ТУРИСТИЧЕСКАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2008 |
|
RU2369372C1 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА (ВАРИАНТЫ) | 2009 |
|
RU2387434C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| ШАГАЮЩАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2009 |
|
RU2404900C1 |
| ИНВАЛИДНАЯ КОЛЯСКА | 2011 |
|
RU2475222C2 |
| Движитель Н.Т. Краснова с узлом поворота коленвала, транспортное средство с этим движителем и способ его движения (варианты) | 2017 |
|
RU2657710C1 |
| МИКРОАВТОМОБИЛЬ | 1998 |
|
RU2185990C2 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2015 |
|
RU2578800C1 |

Использование: органы управления транспортными средствами для инвалидов, о медицинской технике. Сущность изобретения:, орган ручного управления инвалидной коляской выполнен в виде шарнирно соединенного с рамой пустотелого рычага, в верхней части которого установлены рычаги управления тормозной системой и механизмом реверсирования, а также рукоятка руля поворота, связанная трубчатым рычагом с механизмом привода рычага поворота колес, расположенного в нижней части органа ручного управления. Тяги размещены во внутренней трубе, а привод рычага поворота колес выполнен в виде двух зубчатых конических колес, одно из которых закреплено на нижнем конце трубчатого рычага, а другое связано винтовым устройством с цилиндрической рейкой, взаимодействующей через цилиндрическое зубчатое колесо с рычагом поворота колес. Снаружи на пустотелом рычаге установлен механизм фиксации и регулирования тяги движителя. Орган ручного управления инвалидной коляской позволяет, при необходимости, все операции управления совершать одной рукой, не отпуская органа. 1 з.п. ф-лы, 3 ил. (Л
| СПОСОБ ВОЗВЕДЕНИЯ ИСКУССТВЕННОГО ЦЕЛИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2018693C1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
