Изобретение относится к электротехнике, а именно к электрическим измерениям, и предназначено для контроля разности частот двух низкочастотных синусоидальных сигналов,
Известен способ контроля разности частот двух синусоидальных сигналов (авт. св. СССР № 1345286, кл. Н 02 J 3/06, опублик. 1987), при котором фиксируют по три мгновенных значения каждого из двух контроли- руемых напряжений через эталонные промежутки времени и по этим значениям определяют модуль разности частот.
Указанный способ обладает ограниченными функциональными возможностями вследствие его неработоспособности в спу- чае, когда в момент фиксации второго мгновенного значения один из контролируемых сигналов проходит через ноль.
Наиболее близким к предлагаемому по сущности и достигаемому результату является способ контроля разности частот двух синусоидальных сигналов (авт. св. СССР № 1707560, кл. G 01 R 23/00, Н 02 Н 3/06, 26.07.88), при котором одновременно изме- ряют мгновенные значения этих сигналов, формируют эталонные промежутки времени и фиксируют следующие через них мгно- венные значения первого и второго контролируемых сигналов, дополнительно сдвигают каждый из сигналов на угол п /2, измеряют мгновенные значения сдвинутых сигналов одновременно с измерением мгновенных значений контролируемых сигналов, фиксируют по два значения каждого из упомянутых сигналов, следующих через эталонный промежуток времени, и по зафиксированным значениям контролируемых и сдвинутых сигналов определяют модуль разности частот.
Основной недостаток данного способа заключается в потере точности вычисления модуля разности частот при отклонении частот контролируемых напряжений от расчетных значений, т.к. в этом случае создаваемые фазосдвигающими элементами фазовые сдвиги отличаются от заданных л /2. Кроме того, указанный способ не позволяет определить энак разности частот, что ограничивает его функциональные воз- можности.
Цель изобретения - повышение точности и расширение функциональных возможностей способа.
На фиг.1 и 2 поясняется сущность способа; на фиг.З представлена структурная схема аналого-цифрового устройства для реализации способа.
Способ контроля разности частот двух синусоидальных сигналов основан на сдвиге каждого исходного сигнала в произвольную сторону без изменения амплитуды на установленный угол, определяемый допустимой погрешностью и быстродействием измерения, формировании первых и вторых дополнительных сигналов соответственно как суммы и разности первых исходного и сдвинутого сигналов, третьего и четвертого дополнительных сигналов как суммы и разности вторых исходного и сдвинутого сигна- лов и фиксации в начале и в конце эталонного промежутка времени мгновенных значений каждого из четырех дополнительных сигналов.
Разность частот определяют согласно математическому выражению
, Af Slgn(lJ-X);4rccos(x-y + y (i-x2)(1-y2},
где jfJWiU
,ХЧ)
у
ЧХгЧКХгО
Uц, U21, Dai, U41 -мгновенныезначения соответственно первого, второго, третьего, четвертого дополнительных сигналов в начале эталонного интервала времени;
Ui2, U22, Us2, U42 мгновенные значения соответственно первого, второго, третьего, четвертого дополнительных сигналов в конце эталонного интервала времени;
At - эталонный интервал времени.
Сущность способа определения разности частот двух синусоидальных сигналов состоит в следующем.
Предположим, что первый исходный синусоидальный сигнал Uexi сдвигают на уста- новленный для заданного значения частоты угол а (фиг. 1 а):
UC1 UBxi e
j«OO
(2)
Операцию сдвига выполняют таким образом, ЧТОбы аМПЛИТуДЫ ИСХОДНОГО 11вх1.макс
и сдвинутого иС1,макс сигналов на всех частотах были равны 11вх1,макс иС1,макс. Установленное значение угла а выбирают по двум критериям: допустимой погрешности и быстродействию измерения. Минимальная погрешность измерения обеспечивается при угле а, близком к л /2, для заданной частоты, являющейся средним значением диапазона измерения за счет выравнивания амплитуд дополнительных сигналов.
Максимальное быстродействие измерения достигается при угле 7, близком к 0. Поэтому оптимальный угол 7 находится в диапазоне от 0 до л /2, а его установленное значение выбирается в зависимости оттого, какой из критериев является определяющим.
Первый дополнительный сигнал Ui и второй дополнительный сигнал Оаформиру- ют из первого исходного Овх1 и сдвинутого по отношению к нему без изменения амплитуды на установленный угол «сигнала Ос1 по соотношениям
U1 Uc1 + Овх1 ;
(3)
U2 Ud - UBx1.
Поскольку амплитуды сигналов Uaxi и Ud равны на всех частотах, дополнительные сигналы Ui и U2 всегда являются диагоналями ромба, образованного векторами йвх1 и Ud, в связи с чем угол между векторами Ui и U2 составляет л:/2 и не зависит от фазового сдвига а между 0Вх1 и Ос1, з следовательно, и от частоты исходного сигнала. Сдвигая второй исходный сигнал 0Вх2 на установленный угол /9 и рассуждая аналогично, получают из второго сдвинутого сиг
j/3(flfc) нала Uc2 . UBx2 eтретий 11з и
четвертый IJ4 дополнительные сигналы (фиг. 16):
г-
U3 Ос2 + Овх2 } 04 Ос2 - 0Рх2.
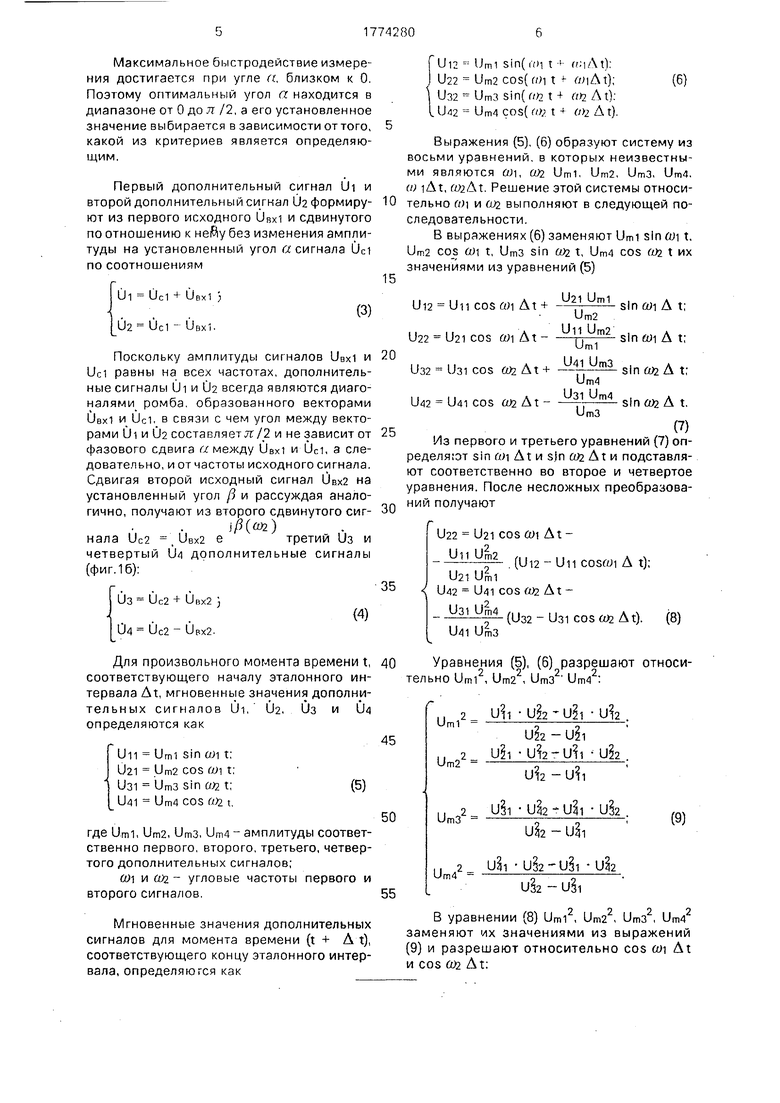
U12 - Umi Sin( «М t l fMAtV
U22 Um2 COS( Wl t f Ml At);
U32 Um3 S m( dfi t + ( A t):
. Um4 COS( (11} t 4 ( A t).
Выражения (5), (6) образуют систему из восьми уравнений, в которых неизвестными ЯВЛЯЮТСЯ ОЛ, Ш2 Umi, Um2, Um3, Um4.
a) iAt, адАт. Решение этой системы относительно ш и 0)2 выполняют в следующей последовательности.
В выражениях (6) заменяют Umi sin (t) t,
Um2 COS ftJl t, Um3 Sin 0)2 t, COS 0)2 t ИХ
значениями из уравнений (5) Uк Un cos toi At + -U, Um1 sin 0)1 A t;
Um2
U22 U2i cos At - -UV.Um2 sin wi A t;
Um1
U32 U31 COS 0)2 At + , Sin (JD2 A t;
Um4
20 2530
U42 U41 COS UJ2 At
U3-iy slnftuAt.
Um3
(7)
Из первого и третьего уравнений (7) определяют sin ал At и sjn 0)2 At и подставляют соответственно во второе и четвертое уравнения. После несложных преобразований получают
U22 U21 COS O)1 At
UllUm2
(Ui2 - Un cosroi A t);
U42 U41 cos ад At (4)
U31 Um4 U41
(U32 - U31 COS At). (8)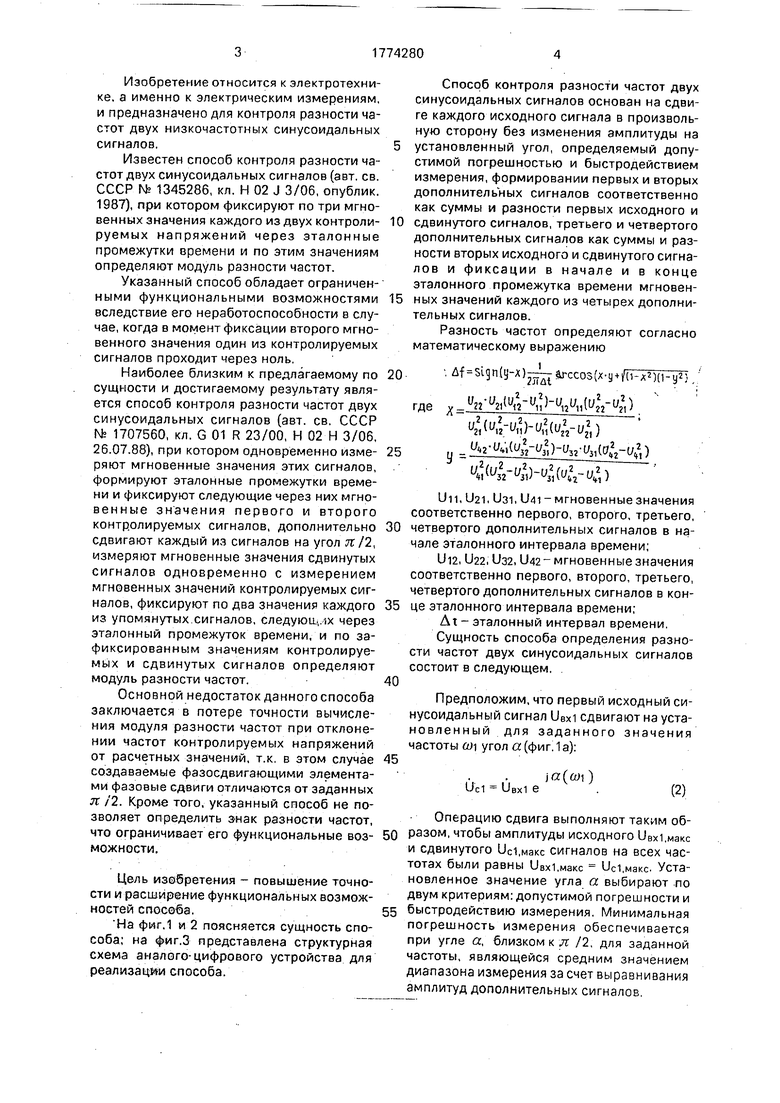


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАЗНОСТИ ФАЗ ДВУХ СИНУСОИДАЛЬНЫХ СИГНАЛОВ | 1991 |
|
RU2029962C1 |
| Способ определения частоты синусоидального напряжения | 1989 |
|
SU1688183A1 |
| Способ контроля разности частот двух напряжений | 1988 |
|
SU1707560A1 |
| Радиоимпульсный фазометр | 1989 |
|
SU1677655A1 |
| ФАЗОМЕТР С ГЕТЕРОДИННЫМ ПРЕОБРАЗОВАНИЕМ ЧАСТОТЫ | 2013 |
|
RU2551837C2 |
| УСТРОЙСТВО КОРРЕКЦИИ ФОРМЫ КРИВОЙ НАПРЯЖЕНИЯ | 2014 |
|
RU2580944C1 |
| Цифровой измеритель несимметричности сигналов | 1990 |
|
SU1725179A1 |
| ФАЗОМЕТР С ГЕТЕРОДИННЫМ ПРЕОБРАЗОВАНИЕМ ЧАСТОТЫ | 2012 |
|
RU2497136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СДВИГА ФАЗ ДВУХ СИГНАЛОВ С ИЗВЕСТНЫМ ОТНОШЕНИЕМ ИХ АМПЛИТУД | 1993 |
|
RU2040001C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СДВИГА ФАЗ ДВУХ СИНУСОИДАЛЬНЫХ СИГНАЛОВ | 1993 |
|
RU2039360C1 |
Изобретение относится к измерительной технике и может быть применимо для контроля разности частот двух низкочастотных синусоидальных сигналов. Способ контроля разности частот двух синусоидальных сигналов, основанный на одновременном измерении в начале и в конце эталонного интервала времени мгновенных значений двух пар синусоидальных сигналов, сдвинутых по фазе в каждой паре на угол л /2, отличается тем, что, с целью повышения точности и расширения функциональных возможностей способа, из первого и второго исходных сигналов путем сдвига последних в произвольную сторону без изменения амплитуд на установленные упы получают первый и второй сдвинутые сигналы, формируют первый и второй дополнительные сигналы как сумму и разность первых исходного и сдвинутого сигналов и третий и четвертый дополнительные сигналы, как сумму и разность вторых исходного и сдвинутого сигналов, фиксируют по два мгновенных значения каждого из четырех дополнительных сигналов, разность частот определяют согласно формуле (y-x)4rccos(x-y+/(T-x )), )-V Xi-tJn) («,V-UJi) УМ и-Ц -Ця-ии№ -Цм У чХзЧКХгФ где Un, Dai, Dai, IMi, Ui2, Uaa, U32, U42 - мгновенные значения первого, второго, третьего, четвертого дополнительных сигналов в начале и конце эталонного интервала времени A t. Устройство для реализации способа содержит преобразователи 1, 2 напряжения, фазовращатели 3, 4, сумматоры 5, 7, вычитатели 6, 8, четыре аналого-цифровых преобразователя 9, управляемый генератор 10 импульсов, элемент 11 задержки, блок 12 памяти, цифровой индикатор 13.3 ил. /г Ё VI 2 Ю 00 о
Для произвольного момента времени t, соответствующего началу эталонного интервала At, мгновенные значения дополни- тельных сигналов Ui, U2, Оз и U4 определяются как
Un Urni sin аи t; Uzi Um2 cos m t:
U31 Um3 Sin 0)2 t; U41 Um4 COS 0)2 t,
где Umi, Um2, Um3, Um4 - амплитуды соответ- ственно первого, второго, третьего, четвертого дополнительных сигналов;
W1 и од - угловые частоты первого и второго сигналов.
Мгновенные значения дополнительных сигналов для момента времени (t + A t), соответствующего концу эталонного интервала, определяются как
Уравнения (5), (6) разрешают относительно Umi2, Um22, Urn32 Um42:
40
45
. . 2 U21 U§2 U22 Um1 - -
50
- U3i
ii 2 u3i u22-u2i
U22 - U21
2 uSi - uli u§2
Um3
- U3i
(9)
55
,, 2 uii -u§2-u§i
Um4 -
- uSi
В уравнении (8) Umi2, Um22, Um32, Um42 заменяют их значениями из выражений (9) и разрешают относительно cos At и cos ад At:
fx cos w At:
,
)
y-cosftJuAt ,
ЧХХН ХгО Учитывая, что ш- 2 тс 1 и од 2 я f2, модуль разнос ти 4acTOT|Af| |fi -f2J определяется согласно выражению
1М--2 Т|(
(arccosx arccosy).
Используя далее известную формулу преобразования разности двух обратных тригонометрических функций
arccosx - arccosy ± arccos(x у +
+ ,|(1-x2J(),
где берется при х у, а знак - - при х у, получают окончательную формулу (1) для вычислен -ля разности частот Д f двух синусоидальн jx сигналов.
К непосредственно используемым параметрам при вычислении разности частот по формуле (1) относятся мгновенные значения четырех дополнительных сигналов, измеренные однс временно в начале и в конце эталонного интервала времени.
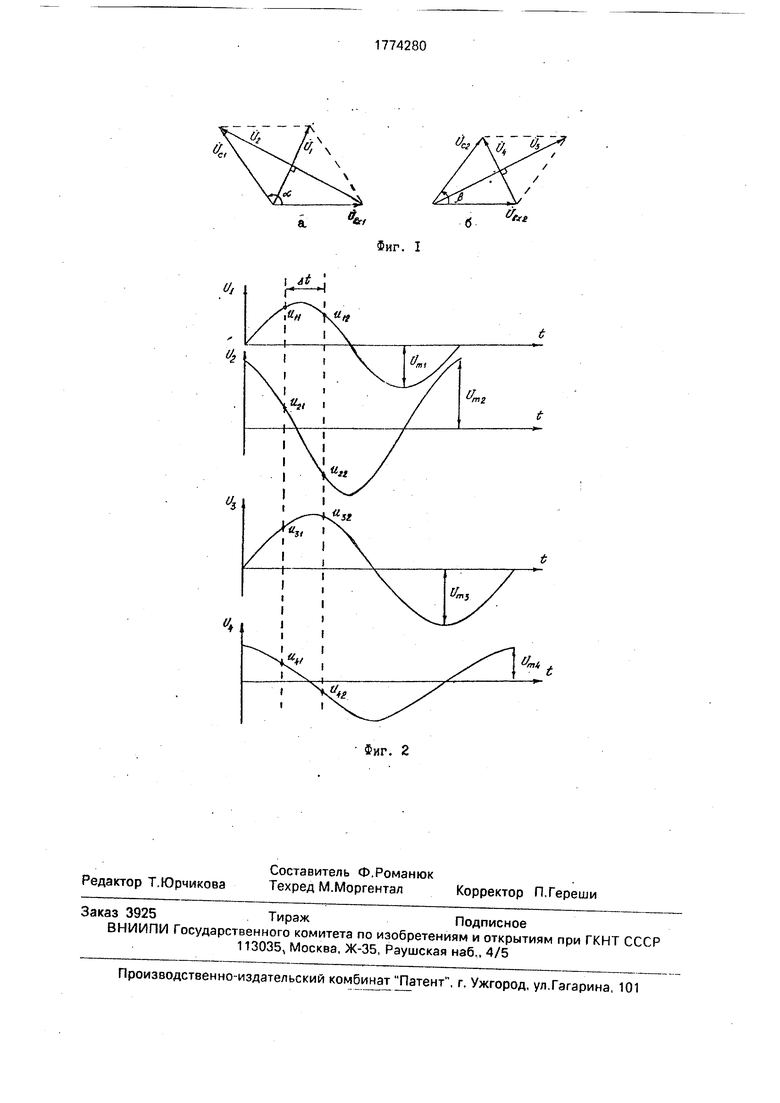
Гибридное аналого-цифровое устройство для реализации предложенного способа (фиг.З) содержит преобразователи 1, 2 напряжения, на в оды которых подаются соответственно входные напряжения UBxi и UBx2, фазовращатели 3, 4, сумматоры 5, 7, вычитатели 6, 8, четыре аналого-цифровых преобразоватеая 9, управляемый генератор 10 импульсов, элемент 11 задержки, блок 12 памяти, состоящий из восьми регистров G1 - G8 памяти, и бюк 13 цифровой индикации, включающий восемь элементов, каждый из которых представляет собой последовательно соединэнные дешифратор и цифровой индикатор
Выходы преобразователей 1 и 2 напряжения подключены соответственно к входам фазовращателей 3 и 4, причем выход фазовращателя 3 соединен с первыми входами сумматс р j 5 и вычитателя 6, на вторые входы которьх подается входное напряжение UBxi, а фазовращателя 4 соединен с первыми входами сумматора 7 и вычитателя 8, на вторые входы которых подается входное напряжение UBx2. Выходы сумматора 5, вычитателя 6, сумматора 7 и вычитателя 8 чзляются входами соответственно первоа , второго, тре)ьего и четвертого аналого-цифровых преобразователей 9, управляющие входы которых соединены с выходом управляемого генератора 10 импульсов, а выходы присоединены соответственно к информационным входам первого G1, третьего G3, пятого G5, седьмого G7 регистров памяти блока 12 памяти. Управляющие входы упомянутых регистров через элемент 11 задержки подключены к выходу
управляемого генератора 10 импульсов, а их выходы - к информационным входам второго G2, четвертого G4, шестого G6, восьмого G8 регистров памяти блока 12 памяти. Управляющие входы этих регистров присоединены к выходу управляемого генератора 10 импульсов, выходы первого G1, второго G2, третьего G3, четвертого G4, пятого G5, шестого G6, седьмого G7, восьмого G8 регистров памяти блока 12 памяти подключены к
соответствукщим входам блока 13 цифровой индикации.
Устройство работает следующим образом.
Переменные напряжения UBxi и UBx2,
частоты которых fi и f2, поступают соответственно на входы преобразователей 1 и 2 напряжения, выполняющих также функцию гальванического разделителя цепей контролируемых напряжений и цепей устройства, и преобразуются в пропорциональные напряжения с заданными амплитудными значениями. Выходное напряжение преобразователя 1 подается на вход фазовращателя 3 и вторые входы сумматора 5 -и вычитателя 6. На выходе фазовращателя 3 получается напряжение Ud такой же амплитуды, как и входное, но сдвинутое по отношению к нему на установленный угол,
которое поступает на первые входы сумматора 5 и вычитателя 6. Аналогично выходное напряжение преобразователя 2 подается на вход фазовращателя 4 и вторые входы сумматора 7 и вычитателя 8. На выходе фазовращателя 4 получается напряжение UC2, поступающее на первые входы сумматора 7 и вычитателя 8 Выходные напряжения сумматора 5 Ui, вычитателя 6 U2. сумматора 7 U3, вычитателя 8 U4 поступают на аналоговые входы соответственно первого, второго, третьего, четвертого аналого-цифровых преобразователей 9. После запуска управляемый генератор 10 импульсов с интервалом At вырабатывает два последовательных импульса, которые подаются на управляющие входы аналого-цифровых преобразователей 9, управляющие входы второго G2, четвертого G4, шестого G6, восьмого G8 регистров памяти блока 12 памяти,
аггакже на вход элемента 11 задержки.
При поступлении очередного импульса единовременно запускаются все четыре аналого-цифровых преобразователя, а также производится запись содержимого первого G1, третьего G3, пятого G5, седьмогоG7 регистров соответственно во второй G2, четвертый G4, шестой G6, восьмой G8 регистры блока 12 памяти. После появления импульса на выходе элемента 11 задержки, к моменту которого заканчивается процесс аналого-цифрового преобразования, цифровые коды мгновенных значений напряжений Ui, Ua, 1)з, U4 с выходов первого, второго, третьего и четвертого аналого-цифровых преобразователей записываются соответственно в первый G1, третий G3, пятый G5 и седьмой G7 регистры памяти.
После поступления с интервалом At двух импульсов от управляемого генератора 10 импульсов в регистрах блока 12 памяти оказываются записанными во втором G2, четвертом G4, шестом G6, восьмом G8 соответственно Lin, U21, 1)з1, U/и результаты первого измерения мгновенных значений напряжений Ui, Ua, Us, Щ, а в первом G1, третьем G3, пятом G5, седьмом G7 регистрах - соответственно Ui2, U22, Us2, U42 результаты второго измерения мгновенных значений этих напряжений.
Эти результаты с выходов всех регистров блока 12 памяти поступают на соответствующие входы блока 13 цифровой индикации. По результатам цифровой индикации мгновенных значений Un, U21. U31, 1)41, Ui2, U22, U32, U42 напряжений с использованием выражения (1) определяют разность частот контролируемых напряжений.
Использование изобретения позволяет по сравнению с прототипом повысить точность определения частот двух синусоидальных сигналов и расширить функциональные возможности способа. Изобретение может быть использовано для построения быстродействующих измерительных органов разности частот устройств релейной защиты и автоматики энергосистем и реализовано с помощью известных решающих элементов, выполненных на базе микроэлектронной техники.
Формула изобретения Способ контроля разности частот двух синусоидальных сигналов, основанный на одновременном измерении в начале и в копце эталонного интервала времени мгновенных значений двух пар синусоидальных сигналов, сдвинутых по фазе в каждой паре на угол тг/2, отличающийся тем, что, с целью повышения точности и расширения
функциональных возможностей способа, из первого и второго исходных сигналов путем сдвига последних в произвольную сторону без изменения амплитуд на установленные углы, определяемые допустимой погрешностью и быстродействием измерения, получают соответственно первый и второй сдвинутые сигналы, формируют первый и второй дополнительные сигналы соответственно как сумму и разность первых исходного и сдвинутого сигналов, а также третий и четвертый дополнительные сигналы соответственно как сумму и разность вторых исходного и сдвинутого сигналов, фиксируют взятые через эталонный интервал времени
по два мгновенных значения каждого из четырех дополнительных сигналов, а разность частот Л f on ределя ют согласно математическому выражению:
30
Af Sign(y-X)-- jbrccos(x-y + TH-x)(l-y),
2ЛД1
где „ yty,
U2XrU,W,(U2VO
ty r i -wV-иД)
- -iZ/,,2
2 г,,г
Wru3i)-Wr
Un, U21. Usi, 1)41 -мгновенныезначения соответственно первого, второго, третьего, четвертого дополнительных сигналов в начале эталонного интервала времени;
Ui2, U22, Ыз2, U42 мгновенные значения соответственно первого, второго, третьего, четвертого дополнительных сигналов в конце эталонного интервала времени;
At - эталонный интервал времени.
At ;
d
С
Фиг. I
Фиг. 2
| Способ контроля разности частот двух напряжений | 1988 |
|
SU1707560A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
