2. Устройство для управления тиристорным электроприводом постоянного тока, содержащее последовательно соединенные задатчик скорости, регулятор скорости, регулятор тока и систему импульсно-фазового управления тиристорным преобразователем, выход которого подключен-к якорю, электродвигателя, датчики напряжения и тока якорной цепи, выходами соединенные с сумматором, причем выход датчика тока соединен также с вторым входом регулятора тока, о т л и ч а ю щ е е с. я тем, что, с целью .повышения точности .управления, оно дополнительно снабжено дифференциатором, нуль-индикаторами тока и производной тока, элементами И и ИЛИ первым вторым и третьим формирователями длительности импульса, ключом и запоминающим блоком, выход которог соединен с вторым входом регулятора
скорости и третьим входом регулятора тока, а вход - с выходом сумматора через ключ, управлямций вход:скоторого соединен с выходом элемента ИЛИ, первый вход которого соединен с выходом элемента И, а второй - с выходом третьего формирователя длительности импульса, соединенного входом через нуль-индикатор производной тока с выходом дифференциатора, по входу подключенного к выходу датчика тока и входу нуль -индикатора тока, соединенного по выходу с первым входом элемента И и входом первого формирователя длительности импульса, инверсный выход которого цодключен ко второму входу элемента И, третий вход которого соединен с инверсным выходом второго формирователя длительности импульса, связанного по входу с выходом системы импульсно-фазового управления.

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный тиристорный электроприводпОСТОяННОгО TOKA | 1979 |
|
SU824393A1 |
| Способ управления тиристорным электроприводом | 1982 |
|
SU1115187A1 |
| Электропривод постоянного тока | 1979 |
|
SU1005257A1 |
| Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока | 1985 |
|
SU1307525A1 |
| Реверсивный тиристорный электропривод постоянного тока | 1980 |
|
SU951614A1 |
| Способ управления тиристорным электроприводом | 1987 |
|
SU1457139A1 |
| Электропривод шахтной подъемной машины | 1973 |
|
SU650192A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| Электропривод постоянного тока | 1979 |
|
SU921015A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2011 |
|
RU2456741C1 |
1. Способ управления тиристорным электроприводом, постоянного тока, при котором измеряют напряжение и ток якорной цепи электродвигателя, по измеренным значениям определяют его ЭДС, задают скорость электродвигателя, по ее заданному значению с помощью полученных значений напряжения, тока и ЭДС электродвигателя определяют момент подключения и по достижении его подключают к электродвигателю сетевое напряжение очередного интервала дискретности тиристорного преобразователя, отличающийся тем, что, с целью повышения точности управления, измеряют мгновенные значения указанных напряжения и тока якорной цепи электродвигателя, определяют их разность в относительных единицах, дополнительно измеряют величину производной тока по времени и контролируют момент вхождения ее в заданную нулевую зону производной тока, с этого момента в течение первого интервала времени длительностью, определяемой заданной допустимой точностью измерения тока, запоминают полученное значение разности напряжения и тока, jg кроме того, после измерения мгновен(Л ного значения тока дополнительно контролируют вхождение тока якорной цепи в заданную нулевую зону токаи при нахождении тока в его нулевой зоне запоминают значение напряжения якорной цепи непрерывно, запрещая запоминание во втором интервале времени длительностью, определяемой наибольшим возможным временем проО) хождения изменяющегося тока якорной цепи через его нулевую зону, начинаND 1C ющемся одновре.1еяно с вхождением тока в нулевую зону, и запрещая запоминание в третьем интервале времени длительностью, определяемой наибольшим возможным временем нахождения тока, якорной цепи в нулевой зоне тока после начала его. коммутации, начинаю-е щемся одновременно с началом очередной коммутации тока, запомненные значения разности напряжения и тока или значение напряжения якорной цепи используют в дальнейшем вплоть до выполнения следукнцей операции запоминания момента подачи на электродвигатель сетевого напряжения в-очередном интервале дискретности тиристорного преобразователя.
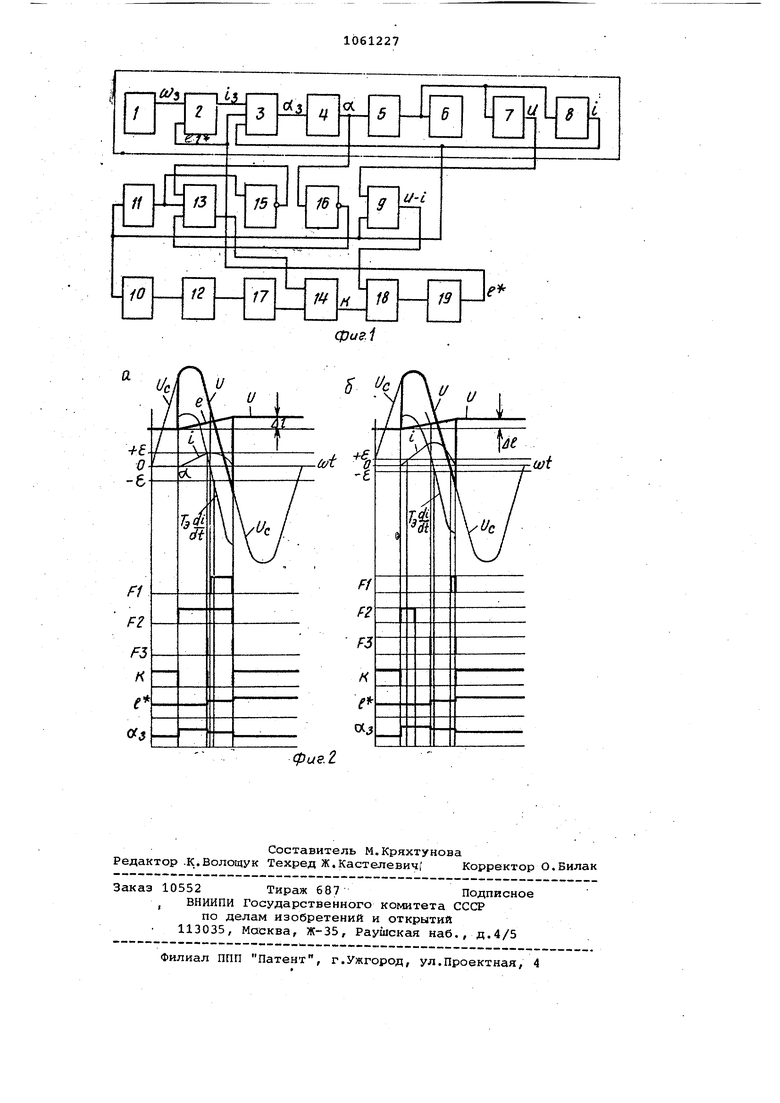
Изобретение относитЪя к электроте нике и может быть использовано для регулирования скорости и тока двигателя тиристорного электропривода постоянного тока. Известны способы управления. электроприводами, согласн.о которыгл задают скорость электродвигателя,, определяют величину его ЭДС и исполь зуют ее в качестве сигнала обратной связи для регулирования скорости и реализующие их устройства, содержащие задатчик скорости, измеритель .ЭДС и регулятор скорости электродвнгателя Г1 - 4 . Недостатком этих способов и уст-, ройств является то, что они приближенно учитывают физические процессы в силовой цепи или оперируют со сред ними, а не с мгновенными значениями координат электропривода при определении ЭДС и тем caMiJM снижают, статическую и динамическую точность управления. Наиболее близким к изобретению яв ляется способ управления тиристорным электроприводом постоянного тока, согласно, которому измеряют напряжение и ток якорной цепи электродвигателя, ПС измеренным значениям определяют ЭДС электродвигателя, задают его скорость, по ее заданномузначению с прмощьюполученных значений :напряжения, тока и ЭДС электродвигатйля определяют момент подключения и :по достижении его подключают к электродвигателю сетевое напряжение очередного интервала дискретности тиристорного преобразователя tsj. Наиболее близким к изобретению является устройство для управления тиристорныгл электроприводом постоянного тока, содержащее последовательно соединенные задатчик скорости, регулятор скорости, регулятор тока и систему импульсно-фазового управления с тиристорным преобразователем, выход которого подключен к якорю электро-,., двигателя, датчики напряжения и тока якорной цепи электродвигателя, выхо дами соединенные с сумматором, выход датчика тока соединен также с вторым входом регулятора тока Сз. Недостатком известных технических решений является то, что определение ЭДС производят с постоянной времени, равной электромагнитной постоянной времен.и якорной цепи, тем самым снижая статическую и дингилическую точность управления электроприводом. Цель изобретения - повышение точности управления тиристорным электроприводом. Поставленная цель достигается тем, что согласно способу управления тиристорным электроприводом постоянтного тока, при котором измеряют напряжение и ток якорной цепи электродвигателя, по измеренным значениям определяют ЭДС электродвигателя, заают скорость электродвигателя, по ее заданному значению с помощью попученных значений напряжения, тока и ЭДС электродвигателя, определяют момент, подключения и по достижении его родключают к электродвигателю сетево напряжение очередного интервала дискретности .тиристорного преобразователя, дополнительно измеряют мгновенные значения указанных напряжения и тока якорной цепи электродвигателя, определяют их разность в относительных единицах, дополнительно измеряют величину производной тока по времени.и контролируют момент вхождения ее в заданную нулевую зону производной тока, с -этого момента в течение первого интервала времени длительностью, определяемой заданной допустимой точностью измере ния тока, запоминают полученное значение разности напряжения и тока, кроме того, после измерения мгновенного значения тока дополнительно кон :тролируют вхождение тока якорной це пи в заданную нулевую зону тока, и при нахождении тока в его нулевой зоне запоминают значение напряжения якорной цепи непрерывно, запрещая запоминание во втором интервале вре-i мени длительностью, определяемой наи большим возможным временем прохождения изменяющегося тока якорной- цепи через его нулевую зону, начинсшзщемся одновременно с вхождением тока в -нулевую зону, и запрещая запоминание в третьем интервале времени длитель.ностью, определяемой наибольшим возможным временем нахождения тока якор ной .цепи в нулевой зоне тока после начала его коммутации, начинающемся одновременно с началом очередной ком мутации тока, запомненные значения разности напряжения и тока или зна;чения напряжения.якорной цепи исполь зуют в дaJIьнeйшeм вплоть до -выполнения следующей операции запоминания для .определения момента подачи на электродвигатель сетевого напряжения В очередном интервале дискретности преобразователя, - В устройство для управления тирис торным электроприводом постоянного тока, содержащее последовательно сое диненные задатчик скорости, peгyлятo скорости, регулятор тока и систе1«1у импульсно-фазового управления тиристорным преобразователем, выход которого подключен к якорю электродвигателя, датчики напряжения и тока якор ной цепи электродвигателя, выходами соединенные с сумматором, причем выход датчика тока соединен также с вторым входом регулятора тока,допол нительно снабжено дифференциатором, нуль-индикаторами тока и производной тока, элементами И и ИЛИ первьгм, вторым и третьим формирователями дли тельности импульса, ключом и запоми наищим блоком, выход которого соедй7 аен с вторым входом регулятора скорости и третьим входом регулятора тока, а вход - с выходом сумматора через ключ, управляющий вход которого соединен с выходом элемента ИЛИ, первый вход которого соединен с выходом элемента И, а второй - с выходом третьего формирователя длительности импульса, соединенного входом через нуль-индикатор производной т.ока с выходом дифференциатора, по входу подключенного к выходу датчика тока и входу нуль-индикатора тока, соединенного по выходу с первым входом элемента И и входом первого формирователя длительности импульса, инверсный выход которбго подключен к вто-рому входу элемента И, третий вход которого соединен с инверсным выходом второго формирователя длительности импульса, связанного по входу с выходом системы импульсно-фазового управления. На фиг.1 представлена функциональная схема устройства, реализующего способ управления тиристорным электроприводом постоянного тока; на фиг.2 - временная диаграмма его работы в двух режимах: а - при малых токах, б - ;.при больших токах. Устройство для управления тиристорным электроприводом постоянного тока содержит последовательно соединенные задатчик скорости 1, регулятор 2 скорости, регулятор 3 тока . и систему 4 импульсно-фазового управления, тиристорным преобразователем 5, выход которого соединен с якорем электродвигателя б, датчики напряжения 7 и тока 8 якорной цепи электродвигателя б, выходами соединенные с сумматором 9, выход датчика 8 тока соединен с вторым входом регулятора тока 3. Кроме того, устройство, содержит дифференциатор 10, нуль-индикаторы тока 11 и производной тока 12, элементы И 13 и ИЛИ 14, формирователи 15-17 длительности импульса, ключ 18 и запоминающий блок 19, выход которого соединен с вторым входом регулятора скорости 2 и третьим входом регулятора тока 3, а вход - с выходом сумматора 9 через ключ 18, управляющий вход которого соединен с выходом элемента ИЛИ 14, первый вход которого соединен с. выходом элемента И 13, а второй - с выходом формироват.еля 17 длительности импульса, соединен ного входом через нуль-индикатор 12 производной тока с выходом дифференциатора 10, по входу подключенного к выходу датчика 8 тока и .входу нуль-индикатора 11 тока, соединенного по выходу с первым входом элемента И 13 и входом формирователя 15 длительности импульса, инверсный выход которого подключен ко второму входу элемента И 13, третий вход ко торого соединен с инвероным выходом формирователя 16 длительности импул .сов, соединенного по входу с выходо системы 4 импульсно-фазового управл ния . Споссб осуществляется следующим образом. Измеряют мгновенные значения напряжения и тока якорной цепи электродвигателя, затем определяют в отн сительных единицах их разность, одн временно измеряют величину производ ной тока по времени и контролируют момент вхождения ее-в заданную зону производной тока, величина которой определяется заданной допустимой точностью измерения тока В момент вхождения производной тока и нулевую зону следукядее уравнение: .. , (и . (uJi+ot| , (2) и - напряжение якоря электро двигателя, е - действительное значение сиг.нала обратной связи п ЭДС электродвигателя; Tj - постоянная времени якорной цепи; to - круговая частота сети} t -.время; ot - угол включения вентиля, определяющее поведение тока якорной цепи на интервале проводимости очередного вентиля тиристорного преобразователя, становится эквивалентны более простому уравнению в соответствии с которым с этого МО мента времени в течение первого интервала времени длительностью, например, около 1 эл. град., также оп .ределяемой заданной допустимой точностью измерения тока, запоминают полученное значение разности напряжения и тока, равное в это время ЭДС электродвигателя. Кроме того, непрерывно контролируют вхождение тока якорной цепи в заданную нулевую зону тока, величин которой определяется заданной допус тимой точностью измерения ЭДС, и при нахождении тока в его нулевой зоне запоминают значение напряжения якорной цепи в те.интервалы времени когда уравнение (З I преобразуется к виду/А, erU(41 т.е. непрерывно, за исключением вто рого интервала времени длительность например, около 25 эл. град., определяемой наибольшим возможным време нем прохождения изменяющегося тока якорной цепи через его Нулевую зону, начинающегося одновременно с вхождением тока в нулевую зону,; и за исключением третьего интервала времени длительностью, например, около 30 эл. град., определяемой наибольшим возможным временем нахождения тока якорной цепи в нулевой зоне тока после начала его коммутации, начинающегося одновременно с началом очередной коммутации тока, так как в течение второго и третьего интервалов времени производная тока может не равняться нулю и уравнения (3 ) и (4 ) не будут справедливыми. Затем задают скорость электродвигателя и запомненные ранее значение разности напряжения и тока или значения напряжения Якорной.-цепи используют в дальнейшем вплоть до выполнения следующей операции запоминания в качестве значения ЭДС для определения момента подключения и по достижении его подключают к электродвигателю сетевое напряжение очередного интервала дискретности тиристорного преобразователя. Далее процесс управления электроприводом повторяется. Устройство работает следующим образом. Сигналы задания скорости электродвигателя Wj с выхода задатчика скорости 1 и обратной связи по ЭДС е с рыхода.запоминающего блока 19 подаются на входы регулятора скорости 2, с выхода которого на первый вход регулятора тока 3 подается сигнал задания тока ij , а на второй вход сигнал обратной связи по току якоря двигателя i. На выходе регулятора тока 3 полу.чается сигнал задания угла подключения электродвигателю сетевого напряжения U,- очередного интервала дискретности уиристорного преобразователя. Этот сигнал с помощью системы импульсно-фазового управления 4 преобразуется в импульсный сигнал ot , осуществляющий указанное подключение сетевого напряжения через тиристорный преобразователь 5 к якорю электродвигателя 6. Значение напряжения U и тока i якорной цепи электродвигателя измеряются соответствующими датчиками 7 и 8 и в относительных единицах алгебраически вычитаются сумматором 9, а их разность через информационный вход ключа 18 подается в запоминающий блок 19 и запоминается в нем по сигналам К на управляющем входе ключа 18. Сигналы к на выходе элемента ИЛИ 14 образуются по двум входным каналам. В первом случае сигнал к образуется тогда, когда и ток, и производная тока равна нулю. При равенстве нулю значения тока на выходе датчика тока 8 нуль-индикатор 11 тока выдает постоянный единичный сигнал на входы элемента И 13 и первого формирователя 15 длительности импульса. Все три формирователя формируют на выходе единичные импульсы соответствующей длительност 1 2 3 Р появлении на их входах единичных сигналов после нулевых. По этому, как показано на фиг.2 а, в |1сходном состоянии формирователи 15 16 длительности импульсов находятся нулевом состоянии, на их инверсных входах держатся единичные сигналы, на выходе нуль-индикатора 11 тока . сигнал также единичный, на выходе элемента И 13 образуется единичный сигнал, который через первый вход элемента ИЛИ 14, формирует сигнал К и производит запись значения ЭДС в запоминающий блок 19. Запомненное значение ЭДС используется в регуляторах скорости 2 и т ,ка 3 для вычисления очередного значения заданного угла включения тири При включении очередного тиристора псэ сигналу oL cиcтe лы 4 импульсно-фазового управления на время около 30 эл. град., запускается формирователь длительности 16 иглпуль сов, запрещая тем самь выдачу еди ничного сигнала с выхода элемента И 1 так как в это время, даже если ток не выходит из нулевой зоны тока, про изводная тока может выходить за пределы нулевой зоны производной тока. Длительность импульса формировате ля 16 длительности импульсов выбирается в зависимости от заданной допус тимой точности е измерения ЭДС и па раметров электропривода и определяется при этом наибольшим возможным временем нахождения тока якорной цепи в. нулевой зоне тока после начала его коммутации, которое для наиболее распространенных промышленных систем не превосходит 30 эл.град. при допус тимой точности измерения в относительных единицах около 0,01. В том случае, когда ток хотя бы на короткое время, выходит за пределы нулевой зоны тока, а потом снова возвргицается в нее, запускается на время около 15 эл. град, формирователь 15 длительности импульсов, запрещая тем самым выдачу единичного сигнала с выхода элемента И 13 во время спада тока в нулевой зоне тока так .как в это время производная тока также может выходить за пределы нулевой зоны производной тока (фиг.26 Длительность импульса формировате ля 15 длительности импульсов тоже вы бирается в зависимости от величины нулевой зоны тока и параметров электропривода ийопределяется при этом наибольшим возможным временем прохождения изменяющегося тока якорной цепи через его нулевую зону, которое для наиболее распространенных промышленных систем не превосходит 15 эл. град, при допустимой величине нулевой зоны тока около 0,01. Во втором случае сигнал К образуется тогда, когда только производная тока находится в предела:х нулевой зоны производной тока, а ток не равен нулю. При этом от дифференциатора 10, определяющего производную тока по сигналу датчика тока 8, требуется высокая точность работы не во всем диапазоне возможных значений производной тока, а -лишь в сравнительно узкой нулевой зоне производной тока. Нуль-индикатор 12 производной тока фиксирует момент вхождения производной тока в заданную нулевую зону производной тока и запускает фор-i мирователь 17 длительности импульсов, на выходе которого образуется единичный сигнал длительностью около 1 эл. град., поступающий на второй вход элемента ИЛИ 14 и через ключ 18, записывающий в запоминающий блок 19 значение ЭДС е в соответствии с уравнением (3) . Длительность импульса формирователя 17 длительности импульсов, как . следует из фиг.2 б, выбирается в зависимости от параметров элёктропривовода, заданной допустимой точности измерения тока и связанной с ней заданной величины нулевой зоны производной тока g , и определяется при этом наибольшим возможным временем, за которое ток может измениться на величину допустимой точности измерения тока с производной тока, равной величине нулевой зоны производной тока. Это время для наиболее распространенных промышленных систем не превосходит величины 1 эл.град. при допустимой точности измерения тока около 0,01. Запомненное значение ЭДС и в этом случае, как указывалось выше, используется для определения момента и подключения сетевого напряжения к якорю электродвигателя. Таким образом, предлагаемое устройство, осуществляя определение ЭДС по мгнoвeнныIvI значениям Тока и напрях ения, обеспечивает повышение точности регулирования скорости электропривода.
фuS.i
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зимин Е.Н., Кацевич В.О., Козырев С.К | |||
| Электроприводы постоянного тока с вентильными преобразователями | |||
| М | |||
| , Энергоиздат, 1981, с.122 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М., Энергия, 1969, с | |||
| Телефонный аппарат, отзывающийся только на входящие токи | 1921 |
|
SU324A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Управление вентильными электроприводами постоянного тока | |||
| М., Энергия, 1970, с | |||
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Расчет систем под чиненного регулирования вентильного электропривода постоянного тока | |||
| М., Энергия, 1972, с | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| I | |||
