фигЛ
Изобретение относится к электротехнике, а именно к электрическим двигателям постоянного тока с бесконтактной коммутацией, т.е. к вентильным электродвигателям, и предназначено для настройки в процессе изготовления и эксплуатации электрических машин, работающих в качестве исполнительных моментных двигателей приводов прецизионных следящих систем и систем стабилизации.
Настройка моментного вентильного электродвигателя (МВД) заключается в определении оптимальных значений токов фаз обмотки якоря синхронного электродвигателя, создающих при различных углах поворота ротора-индуктора требуемый электромагнитный момент при минимальных потерях в обмотке якоря.
Известно устройство для настройки МВД, содержащего синхронную электрическую машину с двухфазной обмоткой якоря и ротором-Индуктором, два усилителя-преобразователя, а также датчик положения ротора в виде синусно-косинусного вращающегося трансформатора, осуществляющего синусно-косинусное преобразование угла и умножение на входной сигнал, пропорциональный амплитуде системы токов обмотки якоря. Устройство содержит задат- чик угла поворота ротора-индуктора, датчи-. ки угла момента. Настройка заключается в развороте статора датчика угла включенного двигателя относительно статора синхронной машины до положения максимума вращающего момента 1.
Недостатком данного устройства является трудность автоматизации процесса настройки в связи с механическим характером настройки.
Известно устройство для настройки МВД, содержащее датчик и задатчик угла, датчик момента, дифференциатор, анализатор знака, генератор импульсов, синхронныйТ-триггер,интегратор, синусно-косинусный функциональный преобразователь, два перемножителя, два аналого-цифровых преобразователя, импульсное управляющее устройство, задатчик амплитуды тока, задатчик адреса, за- поминающее устройство (Авторское свидетельство Ms 1580496, кл. Н 02 Р 6/02, 1988).
Его недостатком является фиксация ам- плитуды токов якоря с получением неизвестного заранее электромагнитного момента.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является устройство для настройки МВД, выполненного на
базе синхронной электрической машины с двухфазной обмоткой якоря и ротором-индуктором, содержащее два усилителя мощности с выходами для подключения к
первой, второй фазам обмотки якоря через входы первого, второго датчиков тока, выходы которых подключены к инвертирующим входам первого, второго усилителей мощности, датчик и задатчик угла, датчик и задат0 чик момента, первый, второй сумматоры, первый, второй интеграторы, синхронный детектор, синусно-косинусный функциональный преобразователь, первый, второй Перемножители, генератор опорного напря5 жения, полупроводниковый ключ, управляющее устройство, счетчик импульсов и запоминающее устройство с аналого-цифровыми преобразователями. Ротор-индуктор механически связан с роторами датчика
0 и задатчика угла и датчика момента, выход которого подключен к входу первого сумматора, второй инвертирующий вход которого подключен к выходу задатчика момента, а выход подключен к входам первого интегра5 тора и синхронного детектора. Его электрод опорного напряжения подключен к второму входу второго сумматора и через полупроводниковый ключ - к выходу гененатора опорного напряжения, а выход подключен к
0 входу второго интегратора, выход которого подключен к первому входу второго сумматора, его выход подключен к входу синусно- косинусногофункционального преобразователя. Его выходы подключены к
5 входам перемножителей, вторые входы которых подключены к выходу первого иытег- ратора, а выходы - к первым входам первого, второго усилителей мощности, первый-третий выходы управляющего уст0 ройства подключены к управляющему электроду полупроводникового ключа, входу синхронизации запоминающего устройства и входам задатчика момента и счетчика импульсов, выход которого подключен к адрес5 ному входу запоминающего устройства, содержащего четыре аналого-цифровых преобразователя, выходы которых подключены к выходам датчика угла, датчика момента, первого, второго перемножителей
0 3.
Недостатком известного устройства является большое время настройки в связи с многоэтапной настройкой при каждом угловом положении ротора-индуктора.
5 Целью изобретения является снижение времени настройки путем непрерывной записи и обработки информации о моменте и. токах в функции угла поворота.
Поставленная цель достигается тем, что в устройство для настройки моментного
вентильного электродвигателя, выполненного на базе двухфазной синхронной машины с обмоткой якоря и ротором индуктором, содержащее электродвигатель для привода синхронной машины, датчик угла и датчик момента для установки на вал синхронной машины, усилители мощности с выходами для подключения к фазам обмотки якоря, два аналого-цифровых преобразователя, входы которых подключены соответственно к выходам датчиков угла и момента, датчики тока, каждый из которых включен на выходе соответствующего усилителя мощности и выходом подключен к инвертирующему входу этого же усилителя мощности, введен цифровой блок определения максимума отношения момента к току, выполненный с возможностью реализации алгоритма, приведенного в описании, выходы упомянутых аналого-цифровых преобразователей связаны с входами цифрового блока, а его выходы - с управляющими входами усилителей мощности.
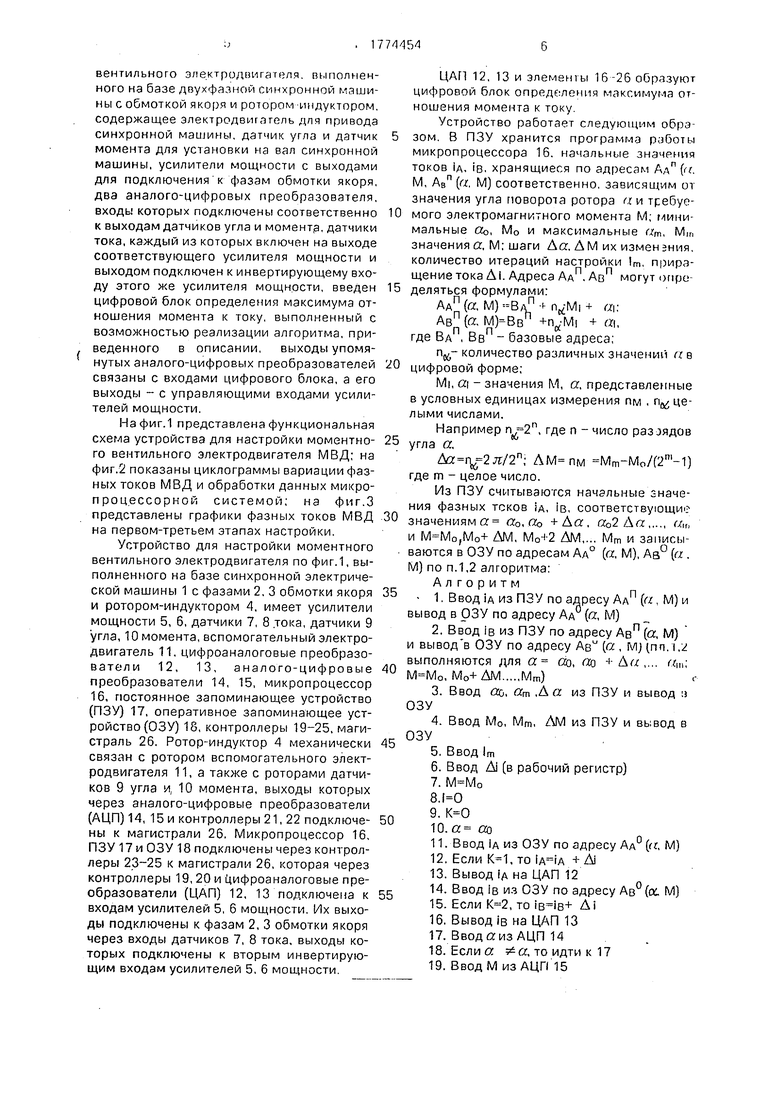
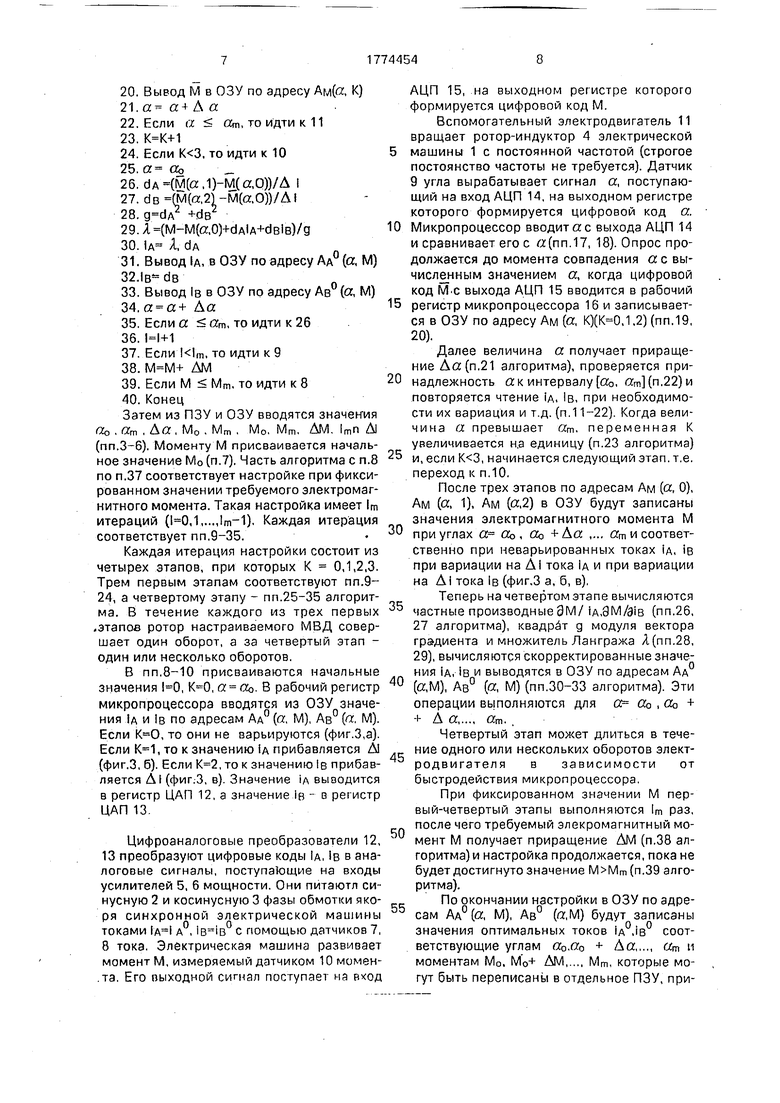
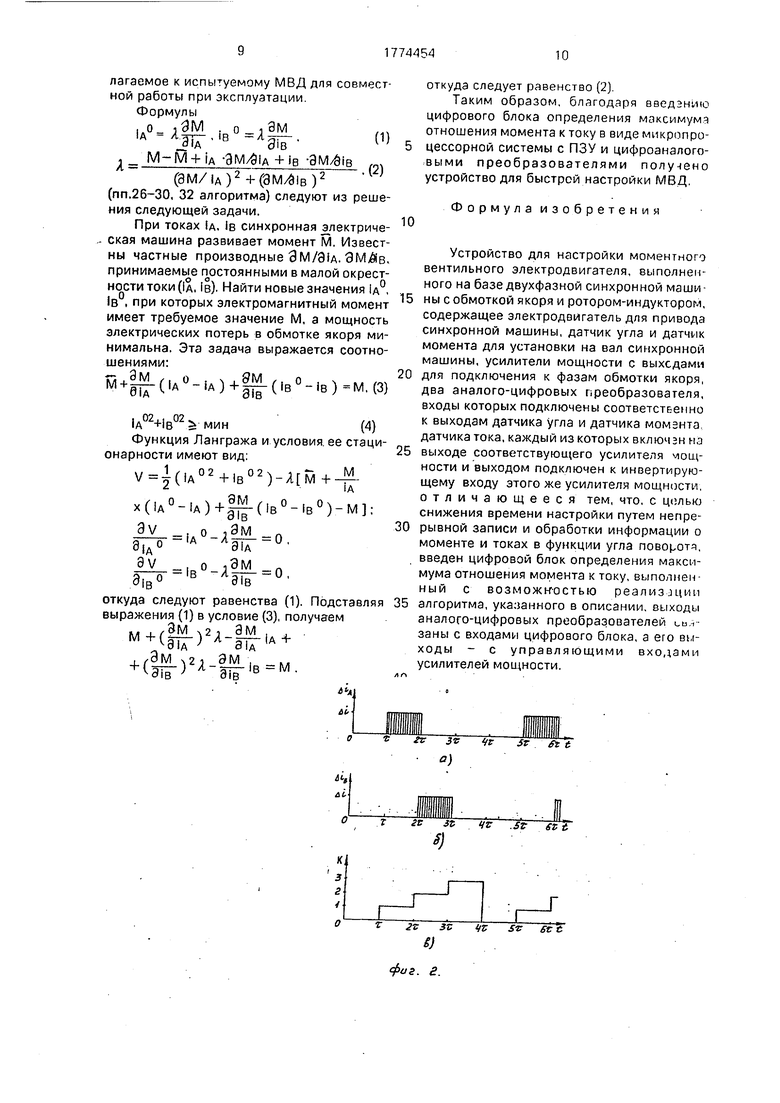
На фиг.1 представлена функциональная схема устройства для настройки моментно- го вентильного электродвигателя МВД; на фиг.2 показаны циклограммы вариации фазных токов МВД и обработки данных микро- процессорной системой; на фиг.З представлены графики фазных токов МВД на первом-третьем этапах настройки.
Устройство для настройки моментного вентильного электродвигателя по фиг.1, выполненного на базе синхронной электрической машины 1 с фазами 2, 3 обмотки якоря и ротором-индуктором 4, имеет усилители мощности 5, 6, датчики 7, 8 тока, датчики 9 угла, 10 момента, вспомогательный электродвигатель 11, цифроаналоговые преобразователи 12, 13, аналого-цифровые преобразователи 14, 15, микропроцессор 16, постоянное запоминающее устройство (ПЗУ) 17, оперативное запоминающее устройство (ОЗУ) 18,контроллеры 19-25, магистраль 26. Ротор-индуктор 4 механически связан с ротором вспомогательного электродвигателя 11, а также с роторами датчиков 9 угла и 10 момента, выходы которых через аналого-цифровые преобразователи (АЦП) 14, 15 и контроллеры 21, 22 подключе- ны к магистрали 26. Микропроцессор 16, ПЗУ 17 и ОЗУ 18 подключены через контроллеры к магистрали 26, которая через контроллеры 19, 20 и цифроаналоговые преобразователи (ЦАП) 12, 13 подключена к входам усилителей 5, 6 мощности. Их выходы подключены к фазам 2, 3 обмотки якоря через входы датчиков 7, 8 тока, выходы которых подключены к вторым инвертирующим входам усилителей 5, 6 мощности.
ЦАП 12, 13 и элемешы 16-26 образуют цифровой блок определения максимума отношения момента к току
Устройство работает следующим образом. В ПЗУ хранится программа работы микропроцессора 16. начальные значения токов д, в. хранящиеся по адресам Ад ((. М, Авп (а. М) соответственно, зависящим от значения угла поворота ротора аи требуемого электромагнитного момента М; минимальные Оо, М0 и максимальные «m, Mm значения а, М; шаги Да, Д М их измен эния. количество итераций настройки lm, приращение тока Д|. Адреса Ад . АО могут опре деляться формулами:
Адп (а, М) + ryMi + «1:
АВП (а. М)Вв +пй-М| + 01. где Вдп, Ввп - базовые адреса;
пй- количество различных значений а в цифровой форме;
MI, а - значения М, а, представленные в условных единицах измерения пм , п целыми числами.
Например 2, где п - число разрядов угла а,
Дя п- 2л:/2п; Мт-М0/(2П1-1) где т - целое число.
Из ПЗУ считываются начальные значения фазных токов IA, IB, соответствующие
значениям а а0, Оо +Да, а02 Да а,„
и ,М0+ ДМ, Мо+2 ДМ,... Mm и записываются в ОЗУ по адресам АА° (а, М), Ав° (а . М) по п.1,2 алгоритма:
Алгоритм
1. Ввод д из ПЗУ по адресу ААП (а, М) и вывод в ОЗУ по адресу Ад (а, М)
2.Ввод IB из ПЗУ по адресу АВП (а, М) и вывод в ОЗУ по адресу Ави (а , М) (пп. .г выполняются для а OQ, OQ + Да ,... fim; , Мо+ДМMm)
3.Ввод йо, ат ,Д а из ПЗУ и вывод и ОЗУ
4.Ввод М0, Mm, ДМ из ПЗУ и вывод в ОЗУ
5.Ввод lm
6.Ввод Д (в рабочий регистр)
7. 8.
9. 10.« оо
11.Ввод IA из ОЗУ по адресу Ад° (((, М)
12.Если . то + Ai
13.Вывод IA на ЦАП 12
14.Ввод IB из ОЗУ по адресу Ав°((Х М)
15.Если , то Ai
16.Вывод IB на ЦАП 13
17.Ввод а из АЦП 14
18.Если а &а, то идти к 17
19.Ввод М из АЦП 15
20.Вывод М в ОЗУ по адресу АМ(«, К)
21.а а+ А а
22.Если а ат, то идти к 11
23.
24.Если , то идти к 10
25.а Оо
26.dA(M(a,1)-M(a,0))/A I
27.ds (M(a,21-M(aO))/Al
28. +dB2
29.A (M-M(a,0)+dAiA+dBiB)/g 30.1A A, dA
31. Вывод IA, в ОЗУ по адресу Ад (а, М) 32.lBtedB
33.Вывод IB в ОЗУ по адресу Ав (а, М)
34,а а+ Да
35. ЕСЛИ а (2т, ТО ИДТИ К 26
36.
37.Если , то идти к 9
38. AM
39.Если М Мт. то идти к 8
40.Конец
Затем из ПЗУ и ОЗУ вводятся значекия
«о , «т , Да , М0 . Мт , Mo, Mm, AM. lmn Al
(пп.3-6). Моменту М присваивается начальное значение М0 (п.7). Часть алгоритма с п.8 по п.37 соответствует настройке при фиксированном значении требуемого электромагнитного момента. Такая настройка имеет Im итераций (,1,...,lm-1). Каждая итерация соответствует пп.9-35,
Каждая итерация настройки состоит из четырех этапов, при которых К 0,1,2,3. Трем первым этапам соответствуют пп.9- 24, а четвертому этапу - пп.25-35 алгоритма. В течение каждого из трех первых .этапов ротор настраиваемого МВД совершает один оборот, а за четвертый этап - один или несколько оборотов.
В пп.8-10 присваиваются начальные значения , , а Оо. В рабочий регистр микропроцессора вводятся из ОЗУ значения д и IB по адресам Ад° (а, М), Ав (а М). Если , то они не варьируются (фиг.3,а). Если , то к значению IA прибавляется Al (фиг.З, б). Если , то к значению IB прибавляется A i (фиг.З, в). Значение IA выводится в регистр ЦАП 12, а значение IB - в регистр ЦАП 13.
Цифроаналоговые преобразователи 12, 13 преобразуют цифровые коды IA, IB в аналоговые сигналы, поступающие на входы усилителей 5, 6 мощности. Они питаютл синусную 2 и косинусную 3 фазы обмотки якоря синхронной электрической машины токами А , с помощью датчиков 7, 8 тока. Электрическая машина развивает момент М, измеряемый датчиком 10 момен- .та. Его выходной сигнал поступает на вход
АЦП 15, на выходном регистре которого формируется цифровой код М.
Вспомогательный электродвигатель 11 вращает ротор-индуктор 4 электрической
машины 1 с постоянной частотой (строгое постоянство частоты не требуется). Датчик 9 угла вырабатывает сигнал а, поступающий на вход АЦП 14, на выходном регистре которого формируется цифровой код а.
0 Микропроцессор вводит о: с выхода АЦП 14 и сравнивает его с а(пп.17, 18). Опрос продолжается до момента совпадения а с вычисленным значением а, когда цифровой код М.с выхода АЦП 15 вводится в рабочий
5 регистр микропроцессора 16 и записывается в ОЗУ по адресу Ам (а, К)(,1.2) (пп.19, 20).
Далее величина а получает приращение Да (п.21 алгоритма), проверяется при0 надлежность а к интервалу Оо, «т (п.22) и повторяется чтение д, IB, при необходимости их вариация и т.д. (п.11-22). Когда величина а превышает am, переменная К увеличивается на единицу (п.23 алгоритма)
5 ц, если , начинается следующий этап. т.е. переход к п.10.
После трех этапов по адресам AM (a, 0), AM (a, 1), AM (a,2) в ОЗУ будут записаны значения электромагнитного момента М
0 при углах a OQ , оь + Да ,... ат и соответственно при неварьированных токах IA, в при вариации на Ai тока IA и при вариации на Ai тока IB (фиг.З а, б, в),
Теперь на четвертом этапе вычисляются
$ частные производные ,ЗМ/д1в (пп.26, 27 алгоритма), квадрат g модуля вектора градиента и множитель Лангража Я(пп.28, 29), вычисляются скорректированные значения JA, IB и выводятся в ОЗУ по адресам Ад
0 (а,М), Ав° (а, М) (пп.30-33 алгоритма). Эти операции выполняются для a GO , GO +
+ A a ат. .
Четвертый этап может длиться в течение одного или нескольких оборотов элект- родвигателя в зависимости от быстродействия микропроцессора.
При фиксированном значении М пер- вый-четвертый этапы выполняются lm раз, после чего требуемый элекромагнитный мо- мент М получает приращение AM (п.38 алгоритма) и настройка продолжается, пока не будет достигнуто значение (п.39 алгоритма).
По окончании настройки в ОЗУ по адресам АА°(а, М), Ав° (а,М) будут записаны значения оптимальных токов IA ,в соответствующие углам оъло + Аа ит и
моментам М0, М0+ AMMm, которые могут быть переписаны в отдельное ПЗУ, прио
5
лагаемое к испыуемому МВД для совместной работы при эксплуатации. Формулы
ЗМ
IB
ам
Л
M-M + JA -ЭМ/Э1д + 1в -ЭМ/б1в
(1)
(2)
(ЗМ/1д)2 + (3M/SlB)2
(пп.26-30, 32 алгоритма) следуют из решения следующей задачи.
При токах д, IB синхронная электрическая машина развивает момент М. Известны частные производные ЗМ/Э1д. ЭМ/б в. принимаемые постоянными в малой окрестности токи (1д, IB). Найти новые значения 1д°, 1в°, при которых электромагнитный момент имеет требуемое значение М, а мощность электрических потерь в обмотке якоря минимальна. Эта задача выражается соотношениями:
ОА°-|А) (1в°-1в)М.(3)
М +
8iA
1А°2-НВ°2 МИН
(4)
Функция Лангража и условия ее стацонарности имеют вид:
(lA02+iB02) x()+|M-(lB0-iB°)
3v . о ,3м п
8 А
A L-iD° ;Эм -п Э о-- в
откуда следуют равенства (1). Подставл выражения (1) в условие (3), получаем
ил i /ЭМ ,2 1 ЭМ , ,
М+(91д) А Э17- А +
+ (|М.)..
v3iB 3iB
откуда следует равенство (2)
Таким образом, благодаря введэнию цифрового блока определения максимума отношения момента к току в виде микропроцессорной системы с ПЗУ и цифроаналого- выми преобразователями полулено устройство для быстрой настройки МВД.
Формула изобретения
Устройство для настройки моментного вентильного электродвигателя, выполненного на базе двухфазной синхронной маши15 ны с обмоткой якоря и ротором-индуктором, содержащее электродвигатель для привода синхронной машины, датчик угла и датчик момента для установки на вал синхронной машины, усилители мощности с выходами
20 для подключения к фазам обмотки якоря, два аналого-цифровых преобразователя, входы которых подключены соответственно к выходам датчика угла и датчика момэнта датчика тока, каждый из которых включэн но
25 выходе соответствующего усилителя мощности и выходом подключен к инвертирующему входу этого же усилителя мощности, отличающееся тем, что, с целью снижения времени настройки путем непре30 рывной записи и обработки информации о моменте и токах в функции угла пово(.отя, введен цифровой блок определения максимума отношения момента к току, выполненный с возможк-остью реализщип
35 алгоритма, указанного в описании, выходы аналого-цифровых преобразователей uuf заны с входами цифрового блока, а его выходы - с управляющими входами усилителей мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1661925A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1580495A1 |
| Моментный вентильный электродвигатель с устройством для его настройки | 1987 |
|
SU1661926A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1515273A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1545300A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1988 |
|
SU1580496A1 |
| Моментный вентильный электропривод | 1986 |
|
SU1427540A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1580494A1 |
Использование: Для настройки в процессе изготовления и эксплуатации электрических машин, работающих в качестве исполнительных моментных двигаталелей следящих систем и систем стабилизации. Сущность: Наряду с датчиками 9, 10, 7, 8 соответственно угла, момента и тока в устройство введена микропроцессорная система на постоянном запоминающем устройстве 17 и цифроаналоговых преобразователях 12, 13. Настройку производят с высокой производительностью. 3 ил.
- - - тг ,- ги
гс it чт .Sf ft t
к
3
г /
т: гъ зъ п sv fc t
Ј)
фиг. г.
иг. 3
| Столов Л.И., Зыков Б.Н | |||
| Моментные двигатели с постоянными магнитами, М.: Энергия, 1977, с.19, 98-100 | |||
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1580495A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1988 |
|
SU1580496A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
