СП
СП L
Изобретение относится к электрическим машинам, а именно к электрическим двигателям постоянного тока с бесконтактной коммутацией, Тое. к мо- ментным вентильным электродвигателям (МВД), и предназначено для настройки в процессе изготовления и эксплуатации электрических машин, работающих в качестве исполнительных момеитных двигателей приводов следящих систем и систем стабилизации различного назначения о
Цель изобретения - сокращение времени настройки МВД,
На фиг.1 представлена функциональная схема устройства для настройки МВД; на фиг.2 - функциональная схема МВД с функциональным преобразователем ..
Настраиваемый МВД 1 содержит электромеханический преобразователь 2 с двухфазной обмоткой 3 якоря и с ротором-индуктором 4, датчик 5 угла поворота ротора, два усилителя 6, два датчика 7 тока.
Устройство для настройки МВД имеет задатчик 8 угла, датчик 9 момента, синхронный детектор 10, интегратор 11, сумматор 12, синусно-косинусный функциональный преобразователь 13, перемножители 14, 15 генератора 16 прямоугольных импульсов, полупроводниковый ключ 17, импульсное управляющее устройство 18 с тремя выходами, счетчики 19, 20 импульсов, аналого- цифровые преобразователи 21, 22, запоминающее устройство 23 с четырьмя информационными входами„
Ротор-индуктор 4 механически связан с роторами датчика 5 угла, задат- чика 8 угла и датчика 9 момента. Его выход подключен к входу синхронного детектора 10, выход которого подключен ко входу интегратора 11, его выход подключен ко входу сумматора 12, выход которого подключен к входу си- нусно-косинусного преобразователя 13, его выходы подключены к входам перем-г
ножителей 14, 15, выходы к(1торых под45
Синхронньм электродвигатель 2 развивает электромагнитный момент М, заключены соответственно к аиалого-цифро- висящий от угла поворота ротора-индуктора 4, определяемого задатчиками 8 угла, от амплитуды 1 системы то- ков обмотки 3 якоря и от угла ft
вым преобразователям 21, 22, а также к входам соответствующих усилителей 6, их выходы пoдкJпoчeны к фа мам обмотки 3 якоря через входы датчиков 7 тока, выходы которых подключены к вторым инвертирующим входам усилителей 6. Выход генератора 16 прямпугольМ М (ot,
if
V b)«M (ci, 1„,(Ь„)±
0
ных импульсов подключен через полупроводниковый ключ 17 к электроду опорного напряжения синхронного де- тектора 10 и к второму входу сумматора 12. Выходы импульсного управляющего устройства 1.8 подключены соответственно к управляющему входу полупроводникового ключа 17, к входу разре0 шения записи запоминающего устройства 23 и к входам счетчиков 19, 20 Их выходы подключены соответственно к вторым входам перемножителей 14,15 и к адресному входу запо1 1инающего
5 устройства 23, информационные входы которого подключены к выходам датчика 5 угла, датчика 9 момента и ана- логоцифровых преобразователей 21, 22 Устройство для настройки МВД работает следующим образом.
Импульсное управляющее устройство 18 выдает с первого выхода импульс, открывающий полупроводниковый ключ 17, через который биполярные импульсы одинаковой длительности и амплитуды поступают от генератора 16 на электрод опорного напряжения синхронного детектора 10 и на второй вход сз матора 12, на первый вход которого подается сигнал с интегратора 11, равный среднему значению i угла . Сигнал + pu,p) поступает на вход синусно-косинусного функционального преобразователя 13, на выходах которого формируются сигналы , cos |3 . Они перемножаются с выходным сигналом счетчика 19 импульсов, имеющим смысл амплитуды 1 системы токов обмотки 3 якоря, пе- 15о С
5
30
5
0
ремножителями 14, поступают сигналы
их выходов
. о
1,
- i sin/j), i; I,
COSi
в
на входы усилителей 6, охваченных глубокой отрицательной обратной
связью по току с помощью датчиков 7 тока и обеспечивающих протекание по фазам обмотки 3 якоря токов i. it i° i i°Л A
ft - B
Синхронньм электродвигатель 2 развивает электромагнитный момент М, зависящий от угла поворота ротора-индуктора 4, определяемого задатчиками 8 угла, от амплитуды 1 системы то- ков обмотки 3 якоря и от угла ft
М М (ot,
if
V b)«M (ci, 1„,(Ь„)±
(О
Этот момент измеряется датчиком 9 момента. Сигнал М поступает на вхо синхронного детектора 10, вырабатывающего сигнал, пропорциональный частной производной 9M/3fo . Этот сигнал подается на вход интегратора I1, вырабатьгаающего среднее значение fbg угла 3 согласно уравнению dPo 1 Эм dt Т р где Т - постоянная времени интегратора II.
Согласно принципу синхронного детектирования в экстремальных регуляторах уравнение (1) определяет движение к точке максимума электромагнитного момента М по углу , По окон- чан ии первого этапа и отключении сигнала Р)ц на выходах перемножителей 14 15 получаются оптимальные значения
.0 .0
токов if, 1 , соответствующих максимуму электромагнитного момента М при фиксированных значениях oi и 1.
Величины I и ftg являются полярными коордшштами точки на плоскости с декартовыми координатами 1д, ig. Полярные координаты удобны при настройке вентильного электродвигателя так как амплитуда 1 может фиксироваться, а искомой переменной при оптимизации является угол jb. Синусно- косинусный функциональный преобразователь здесь используется для перехода от полярной системы координат к декартовой системе. Отметим что п независимый аргумент при максимизации электромагнитного момента, а не угол поворота ротора.
На втором этапе импульсное управляющее устройство 18 вырабатьшает на втором выходе импульс, поступакщий на вход разрешения записи запоминающего устройства 23 о С выходов датчи- угла, датчика 9 момента и аналого-цифровых преобразователей 21, 22 поступают значения угла cL поворота ротора, электромагнитного момента М и оптимальных токов 1°, i на ин- формационны.е входы запоминающего устройства 23, в котором они записываются по адресам, соответствующим сигналу с выхода счетчика 20, подаваемому на адресный вход запоминающего устройства 23.
На третьем этапе импульсное управляющее устройство 18 вырабатьшает импульс на третьем выходе, который
д ,
,
15152736
поступает на входы счетчиков 19, 20, увеличивая т содержимое на единицу. Содержимое счетчика 19 определяет новое значение амплитуды
1 системы
гП
45
50
токов обмотки 3 якоря, а содержимое счетчика 20 новые адреса для записи данных в запоминающем устройстве 23. За третьим этапом следует первый,
10 второй и т„До По достижении амплитудой 1 предельного для данного МВД значения выполняется перестройка за- датчика 8 угла на новое значение угла oi, поворота ротора, установка счетчи15 ка 19 в начальное состояние, выполняются этапы первый, вторюй и т.д. Содержимое счетчика 20 при переходе к повой серии этапов продолжает нарастать. Заканчивается настройка после
20 перебора всех требуемых значений угла Ы. поворота ротора и значений амплитуды If системы токов.
Записанные в запоминающем устрой;0А
&
позстве 23 значения od, М, ij
25 воляют построить функциональный преобразователь для оптимального управления токами МВД.
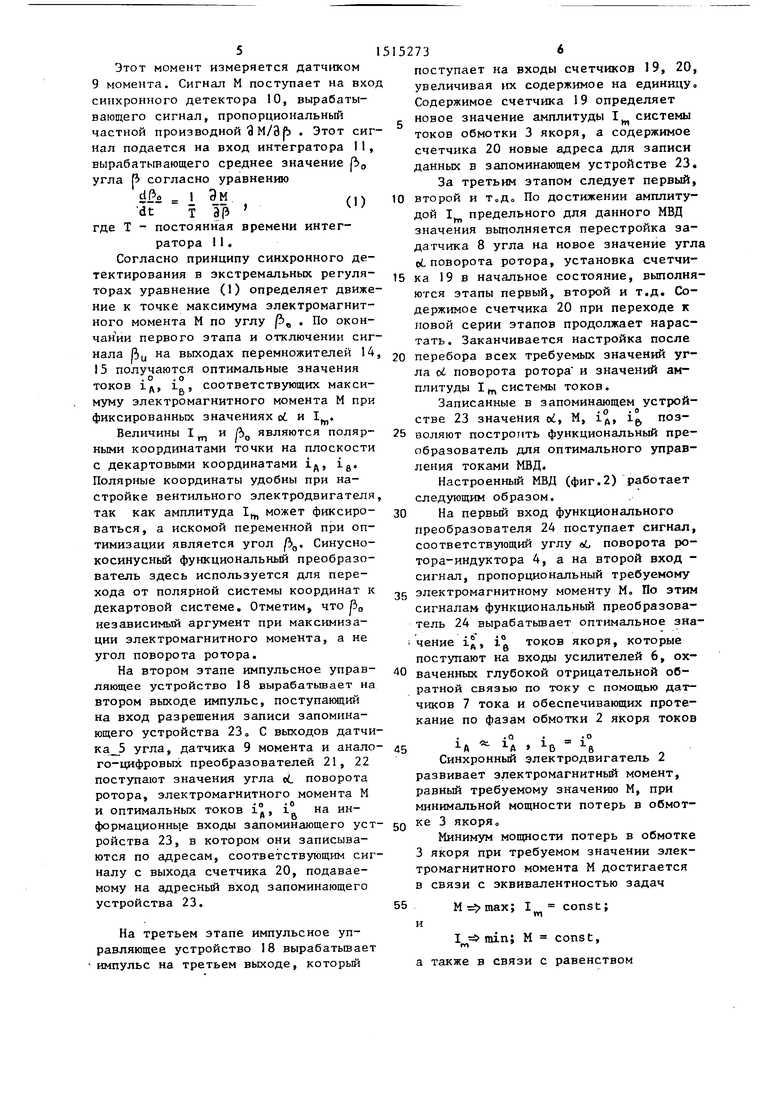
Настроенный МВД (фиг.2) работает следующим образом.
30 На первый вход функционального преобразователя 24 поступает сигнал, соответствующий углу вС поворота ротора-индуктора 4, а на второй вход - сигнал, пропорциональный требуемому
35 электромагнитному моменту М. По этим сигналам функциональный преобразователь 24 вырабатьшает оптимальное зна чение i, i° токов якоря, которые
поступают на. входы усилителей 6, ох- 0 ваченных глубокой отрицательной обратной связью по току с помощью датчиков 7 тока и обеспечивающих протекание по фазам обмотки 2 якоря токов
.о .о
1 г Т 1 гг 1
1ft - 1-д IB 6 Синхронный электродвигатель 2 развивает электромагнитный момент, равный требуемому значению М, при минимальной мощности потерь в обмотке 3 якоря
Минимум мощности потерь в обмотке 3 якоря при требуемом значении электромагнитного момента М достигается в связи с эквивалентностью задач
55
М max;
I const;
rf
и
I min; М const, a также в связи с равенством
г (i
i) ri:
A 4 C
мгновен ое значение мощности
потерь в обмотке 3 якоря; активное сопротивление одной фазы обмотки 3 якоря
Таким образом, в устройстве автоматизирован процесс фиксации опткмаль-ю ных значений токов и установки значений амплитуды системы токов якоря, что сокращает время настройки МВД„
Формула изобретения 15
Устройство для настройки момент- ного вентильного электродвигателя, включающего в себя ротор-индуктор, статор с двухфазной обмоткой якоря, каждая фаза которой подключена к выходу регулируемого источника тока, управляющий вход каждого из усилителей связан с выходом датчика углового положения ротора через функциональный преобразователь, содержащее задатчик угла и датчик вращающего момента, связанные с ротором электромеханического преобразователя, сумматор, два перемножителя, запоминающее устройство, два аналого-цифровых пре- Орразователя, генератор прямоугольных импульсов, управляющее устройство, один из выходов которого связан с входом разрешения записи запоминающего устройства, синусно-косинусный функциональный преобразователь, синусный и косинусный выходы которого соединены с первыми входами первого и второго перемножителей, выходы которых соединены с управляющими входами первого и второго источников то0
5
0
5
0
ка соответственно, выход датчика угла поворота ротора связан с одним из информационных входов запоминающего устройства, отличающееся тем, что, с целью повышения точности и сокращения времени настройки, оно снабжено синхронным детектором,вторым счетчиком импульсов, интегратором, полупроводниковым ключом, управляющее устройство выполнено с возможностью поочередного формирования импульсов на трех его выходах, запоминающее устройство выполнено с четырьмя информационными входами, с одним адресным входом и с входом разрешения записи, выход датчика момента подключен к входу синхронного детектора, выход которого подключен к входу интегратора, его выход подключен к первому входу сумматора, выход которого Подключен к входу синус- но-косинусного функционального преобразователя, выход генератора прямоугольных импульсов подключен через полупроводниковый ключ к второму входу сумматора и к электроду опорного напряжения синхронного детектора,второй и третий выходы импульсного управляющего устройства подключены соответственно к управляющему входу полупроводникового ключа и к входам счетчиков импульсов, выход первого из них подключен к вторым входам перемножителей, а выход второго счетчика - к адресному входу запоминающего устройства, выходы перемножителей подключены к входам аналого-цифровых преобразователей, их выходы и выход датчика момента - к информационным входам запоминающего устройства
м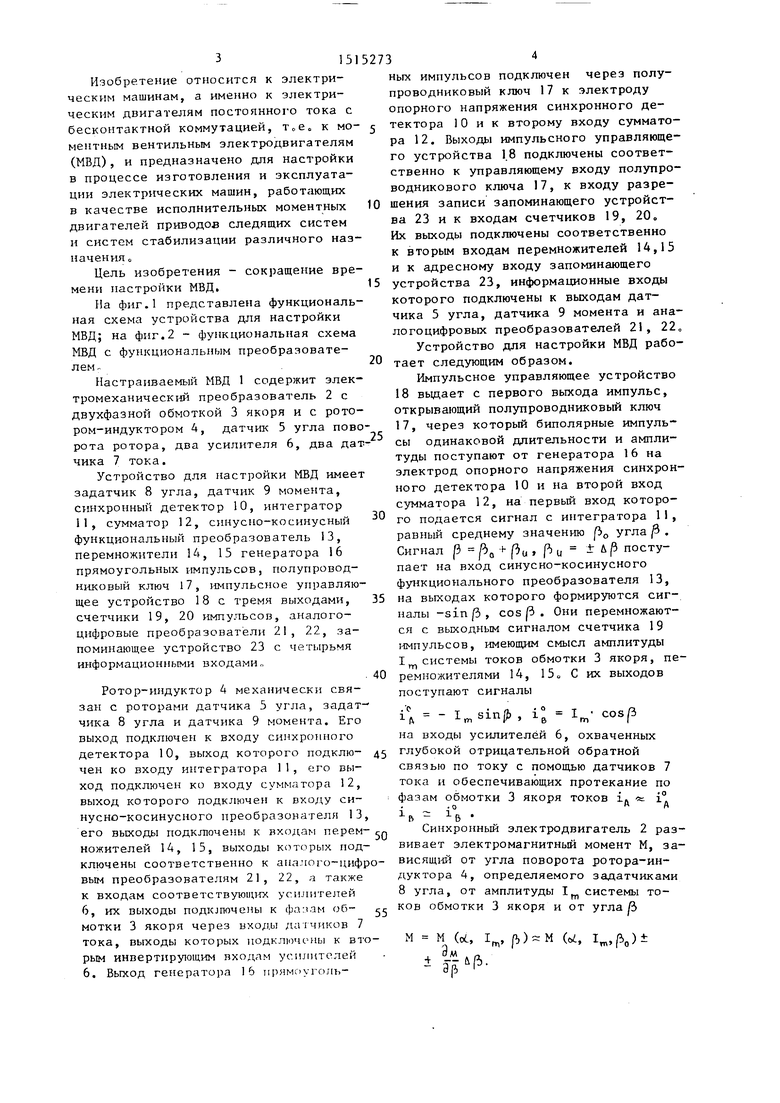
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1580495A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1661925A1 |
| Моментный вентильный электродвигатель с устройством для его настройки | 1987 |
|
SU1661926A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1988 |
|
SU1580496A1 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1448373A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1580494A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1642558A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1275677A1 |
Изобретение относится к эл.машинам, а именно к электродвигателям с бесконтактной коммутацией. Настраиваемый моментный вентильный двигатель (МВД) 1 содержит синхронный электродвигатель 2 с двухфазной обмоткой 3 якоря и с ротором-индуктором 4, датчик угла поворота 5 ротора, два усилителя 6, два датчика 7 тока. Устройство для настройки МВД имеет задатчик 8 угла, датчик момента 9, синхронный детектор 10, интегратор 11, сумматор 12, синусно-косинусный функциональный преобразователь 13, перемножители 14, 15, генератор 16 прямоугольных импульсов. Благодаря введению в устройство для настройки МВД, имеющее структуру экстремального регулятора с синхронным детектированием, полупроводникового ключа 17, импульсного управляющего устройства 18, двух счетчиков импульсов 19, 20, двух аналого-цифровых преобразователей 21, 22 и запоминающего устройства 23 с четырьмя информационными входами автоматизирован процесс фиксации оптимальных значений токов и установки значений амплитуды системы токов якоря, что сокращает время настройки МВД. 2 ил.
Фиг2
| Столов А.И., Зыков БоН.Момент- ные двигатели с постоянными магнитами о М.: Энергия, 1977, с.98-100 | |||
| Устройство для калибровки вентильного электродвигателя | 1987 |
|
SU1471276A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
