Изобретение относится к электротехнике, в частности к моментным электродвигателям с неограниченным углом поворота ротора, может быть использовано в прецизионных электроприводах, от которых требуются повышенный ресурс работы и плавность хода ротора, и является усовершенствованием изобретения по авт.св. № 624617.
Известен двигатель, в котором собственные функции конструктивно и функционально совмещены с системой подвеса ротора, использующей электромагнитные силы отталкивания.
Недостатками данного двигателя являются подвижность ротора в радиальном и осевом направлениях относительно статора, что ограничивает применение данного двигателя в прецизионных системах, и повышенный расход энергии в обмотке якоря.
Известен двигатель, в котором собственные функции конструктивно и функционально совмещены с системой электромагнитной компенсации силы тяжести ротора. Положение оси ротора относительно статора неизменно.
Недостатком указанного двигателя является то, что в нем происходит компенсация только веса ротора, в то время как другие радиальные силы инерции, действующие на опоры вращения, не компенсируются.
Наиболее близким к предлагаемому двигателю по функциональным и конструктивным признакам является моментный вентильный электродвигатель, который содержит синхронную электрическую машину, состоящую из статора с якорной обмоткой и ротора-индуктора, восемь каналов формирования якорных токов, синусно- косинусный преобразователь угла, механически связанный с ротором-индуктором, двадцать перемножителей, восемь сумматоров, четыре операционных усилителя, два функциональных преобразователя, два датчика линейных ускорений, задатчик момента, масштабный преобразователь и источник постоянного сигнала. Якорная обмотка размещена на четырех секторах, а в каждом секторе расположены две фазы, сдвинутые одна относительно другой на п /2 электрических радиан, образуя восемь фаз по порядку, каждая из которых включена в соответствующий канал формирования якорных токов. Благодаря определенным связям двух датчиков линейных ускорений задатчика момента и синусно-косинусного преобразователя угла с функциональными блоками, в якорной обмотке формируются токи, создающие требуемый электромагнитный момент и электромагнитные силы, компенсирующие внешние радиальные силы инерции, приложенные к двигателю под воздействием линейных ускорений, при минимуме потерь мощности в якорной обмотке.
Недостатками известного двигателя являются низкие надежность и плавность хода, связанные с тем, что его опоры
вращения работают в нагруженном режиме под воздействием сил, возникающих в результате того, что центр масс узлов, размещенных на валу двигателя, не лежит в плоскости поперечного сечения, проходящей через середину активной зоны двигателя.
Целью изобретения является повышение надежности двигателя и плавности хода ротора при минимуме потерь в обмотке якоря и сохранении положения оси ротора относительно статора неизменным путем создания электромагнитных сил, компенсирующих действия радиальных сил, возника- ющих из-за того, что центр масс всех узлов,
закрепленных на валу, не расположен в плоскости поперечного сечения проходящей через середину активной зоны двигателя.
Указанная цель достигается тем, что в моментный вентильный электродвигатель
введены третий и четвертый функциональные преобразователи, четыре масштабных преобразователя, второй электромеханический преобразователь с системой управления, выполненные идентично первым.
Ротор введенного электромеханического преобразователя расположен на одном валуе ротором первого электромеханического преобразователя, симметрично относительно нагрузки. Выход первого датчика линейных ускорений через введенные второй и четвертый масштабные преобразователи с коэффициентами преобразования
45
Ki
m И
соответственно подключен к входам первого и третьего функциональных преобразователей, Выход второго датчика линейных
ускорений через введенные третий и пятый масштабные преобразователи с коэффициентами преобразования KI и Ки соответственно подключен к входам второго и четвертого функциональных преобразователей. Выходы третьего и четвертого функциональных преобразователей подключены к перемножителям и сумматорам второй системы управления аналогично тому как выходы первого и второго функциональных
преобразователей подключены к идентичным перемножителям и сумматорам первой системы управления. Введенные функциональные преобразователи выполнены с возможностью реализации функций
0i()
соответственно определяемых равенствами
2 А2 а2 ||
,
(1 -Ж
+ 2A2
)
где А2 Аз - множители Лагранжа задачи на условный экстремум;
Wx, Wy - линейные ускорения датчиков линейных ускорений;
ib эквивалентный ток возбуждения ротора индуктора;
С - коэффициент, связывающий поперечную составляющую тока сектора с тангенциальной электромагнитной силой;
а - постоянный коэффициент;
KI и Кн - коэффициегты преобразования второго и четвертого масштабных преобразователей;
m - масса вала и всех узлов, размещенных на нем;
li и In - расстояния по оси вращения от центра масс УЗЛОВ, размещенных на валу до середины активных зон первого и второго электромеханических преобразователей соответственно.
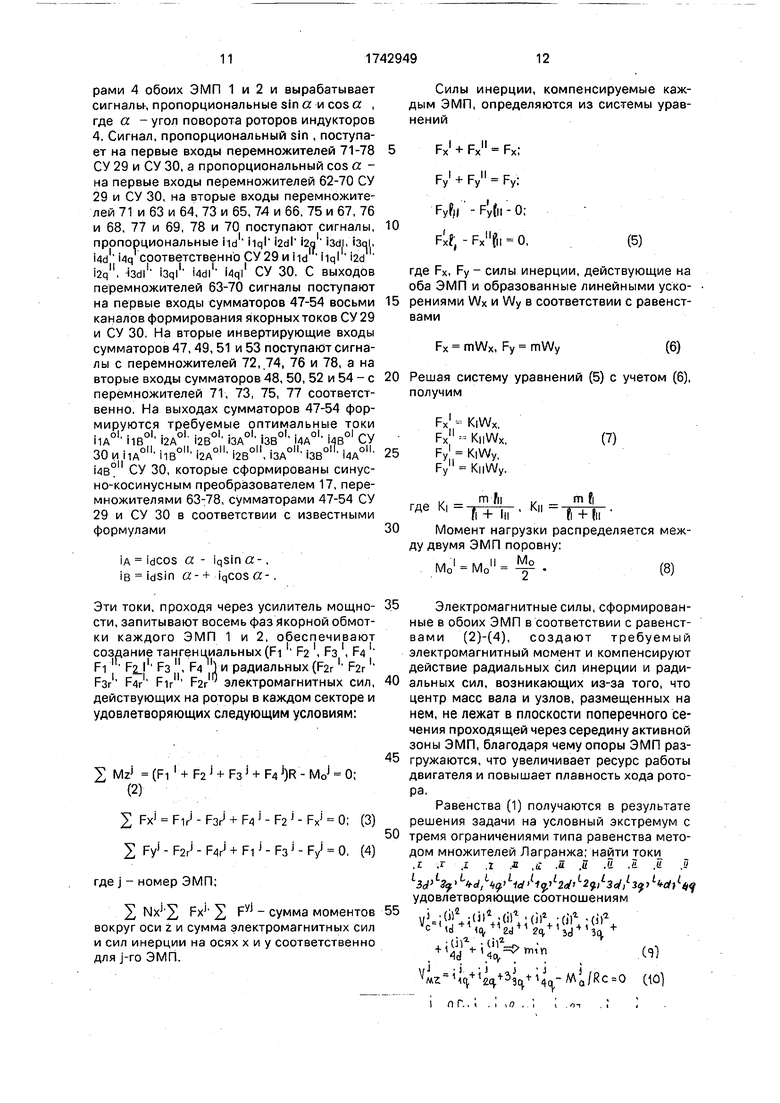
На фиг. 1 представлена кинематическая схема расположения двух электромеханических преобразователей (ЭМП) и нагрузки; на фиг. 2- ЭМП, поперечное сечение; на фиг. 3 - функциональная схема моментного вентильного электродвигателя (МВД).
Оба ЭМП 1 и 2 (фиг.1) состоят из статоров 3 и роторов-индукторов 4, которые размещены на одном валу 5 с нагрузкой 6 между ними. Центр масс вала и всех узлов, размещенных на нем, расположен в точке О и совпадает с центром декартовой системы координат, ось z которой совпадает с осью вала 5. По осям х и у расположены датчики линейных ускорений Wx 7 и Wy 8, по осям х и у показаны радиальные силы инерции Fx и Fy, вокруг оси z - требуемый электромагнитный момент М0. Статоры каждого ЭМП разделяются на четыре равных сектора (I,. I, III, IV), таким образом, что оси I и III секторов
параллельны оси х, а оси II и IV секторов параллельны оси у. По осям этих секторов в плоскостях, проходящих через середины активных зон каждого ЭМП, показаны векторы электромагнитных радиальных Fkr и тангенциальных F сил, когда k и j - порядковые номера секторов и ЭМП соответственно (k 1,2,3,4, j - I и II). Расстояния от плоскостей, проходящих через середины ак0 тивных зон каждого ЭМП до начала координат, h и In соответственно.
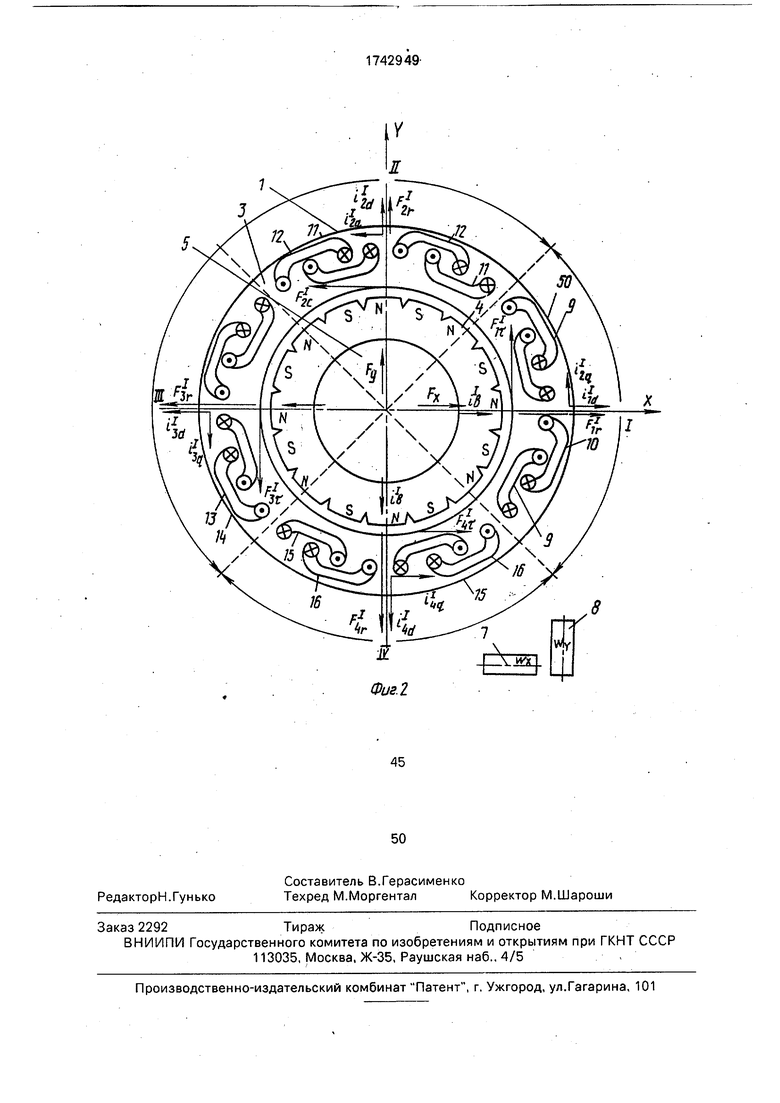
ЭМП 1 (фиг.2) содержит статор 3 и ротор-индуктор 4. На одном основании со статором по осям х и у расположены датчики
5 ускорений Wx 7 и Wy 8. Двухфазная якорная обмотка статора 3 расположена на четырех секторах I-IV с фазами 9 и 10, 11 и 12, 13 и 14, 15 и 16 соответственно. Оси двух соседних секторов взаимно перпендикулярны.
0 Фазы 10, 12, 14 и 16 сдвинуты относительно фаз 9, 10, 13 и 15 на л 12 электрических радиан в положительном направлении. Крестиками и точками показаны положительные направления токов фаз. Показаны
5 направления тангенциальных Fin F4r и
радиальных Fi r электромагнитных
сил. Представлены эквивалентный ток возбуждения ротора-индуктора 4 ь , а также продольные iid, .,l4d и поперечные
0 iiq.-. составляющие систем токов всех четырех секторов. Токи возбуждения и продольные составляющие токов якоря изображены совпадающими по направлению с радиальными силами, а поперечные состав5 ляющие токов якоря - с тангенциальными силами, которые они создают. Показаны положительные направления усилий ротора Fx и Fy на опоры вращения под действием линейных ускорений Wx и Wy,
0Моментный вентильный электродвигатель (МВД) содержит два идентичных ЭМП 1 и 2 (фиг.З), каждый из которых состоит из статора 3 и ротора-индуктора 4, два датчика линейных ускорений Wx 7 и Wy 8, на стато5 pax 3 обоих ЭМП расположена якорная обмотка с фазами 9-16, синусно-косинусный преобразователь 17, источники 18 постоянного сигнала, задатчик 19 момента, функци- ональные преобразователи 20-23,
0 масштабные преобразователи 24-28, системы (СУ) управления 29 и 30.
Каждая из СУ состоит из усилителей 31- 38 мощности, датчиков 39-46 тока, сумматоров 47-62, перемножителей 63-82 и
5 операционных усилителей 83-86.
Роторы-индукторы 4 каждого ЭМП механически связаны с ротором синусно-коси- нусного преобразователя 17 угла, синусный и косинусный выходы которого подключены к входам перемножителей 71-78 и 63-70 соответственно обеих СУ (29 и 30). Выходы датчиков 7 и 8 линейных ускорений через масштабные преобразователи 25, 26 и 27, 28 подключены к входам функциональных преобразователей 20, 21 и 22, 23 соответственно. Выходы функциональных преобразователей 20 и 22 подключены к входам перемножителей 79, 81 и 80, 82, к входам сумматоров 58 и 55, инвертирующим входам сумматоров 56 и 57 соответственно СУ 29. Выходы функциональных преобразователей 21 и 23 подключены к входам аналогичных блоков СУ 30. Выход источника 18 постоянного сигнала подключен к входам сумматоров 59-62 обеих СУ (29 и 30), вторые входы которых подключены к выходам операционных усилителей 83-86, а выходы подключены к вторым входам перемножителей 79-82 соответственно. Выходы перемножителей 79 и 80 подключены к входам операционных усилителей 83 и 84, а выходы перемножителей 81 и 82 - к инвертирующим входам операционных усилителей 85 и 86 соответственно, Выходы операционных усилителей 83-86 подключены к их вторым инвертирующим входам. Выход задатчика 19 момента через масштабный преобразователь 24 с коэффициентом преобразования 1/8 RC, где R - средний радиус воздушного зазора ЭМП, С - коэффициент, связывающий поперечную составляющую тока сектора с тангенциальной силой, соединены с вторыми входами сумматоров 55- 58 каждой СУ (29 и 30). Выходы операционных усилителей 83-86 подключены к вторым входам перемножителей 71 и 63, 73 и 65, 75 и 67, 77 и 69 соответственно, а выходы сумматоров 55-58 - к вторым входам перемножителей 72 и 64, 74 и 66, 76 и .68, 78 и 70 соответственно. Выходы перемножителей 60-70 подключены ко входам сумматоров 47-54 соответственно. Выходы перемножителей 71,73,75и 77 подключены к вторым входам сумматоров 48, 50, 52 и 54 соответственно. Выходы перемножителей 72, 74, 76 и 78 подключены к вторым инвертирующим входам сумматоров 47, 49, 51 и
53соответственно. Выходы сумматоров 4754подключены к входам усилителей 31-38 мощности соответственно. Выходы усилителей 31-38 мощности подключены к фазам 9-16 обмотки якоря соответствующего ЭМП через входы датчиков 39-46 тока соответственно, выходы которых подключены к вторым инвертирующим входам усилителей 31-38 мощности. Функциональные преобразователи 20-23 реализуют функции, определяемые равенствами
2AVgi§ + FX/C
(1-АЈ)2а2)2
. (1-АЈ) а2)2
F/C (1-ЯЈ)2а2)2
2Лз а212. +2Aij Fii/c (1 -rf )
a2)2
где Лг 2 Лз АЗ - множители Лагранжа за- дачи на условный экстремум;
а - постоянный коэффициент;
Fx , Fx, Fy , Fy - доли радиальных сил инерции по осям х и у, которые действуют на ЭМП 1 и 2.
Fx1 Fy , Fy - определяются в соответствии с равенствами
,
30
F -K, 1-х -К| с
35
Wy
С
Fy Кп
Wx С
KI и Кп - коэффициенты преобразования 40 масштабных преобразователей 20, 22 и 21, 23 соответственно, которые определяются в соответствии с равенствами
45
К|
m fu
Кп
m fn F+Ш
где ft и fti - расстояние от плоскостей поперечных сечений, проходящих через середины активных частей соответствующих ЭМП, до центра масс всей системы;
m - масса вала и всех узлов, размещен- ных на нем.
Моментный вентильный электродвигатель работает следующим образом.
Задатчик 19 момента вырабатывает сигнал, пропорциональный требуемому моменту М0, который, проходя через масштабный
преобразователь 24 с коэффициентом преобразования 1/8RC, поступает на первые входы сумматоров 55-58 СУ 29 и 30 в виде сигнала пропорционального множителя Лагранжа AI . Датчики 7 и 8 линейных уско- рений вырабатывают сигналы, пропорциональные линейным ускорениям Wx и Wy соответственно. Эти сигналы через масштабные преобразователи 25, 27 и 26, 28 с коэффициентами преобразования
к:, -JUlL
14 - -г-:-s- ft + til
И
K,,.mf
d+fti
поступают на функциональные преобразователи 20, 22 и 21, 23 соответственно. Фун- 20 кциональные преобразователи 20-23 реализуют функции
rtFJO А2 р(рЛ) & -p(Fy) № rtF{/)
дставленные в неявном виде
-Ц44- + 2 Р1/С (1-АЈ) а2)2
2 Д|/ FJI/C (1-)
а ; 2АзаЧ
+ 2 Ji Р/С
(1-Аз1) а2)2 +
-Аз)2
(1
,
сумматоров 59-62 СУ 29 и 30. С выходов этих сумматоров сигналы поступают на вторые входы перемножителей 79-82 соответственно, а на первые входы перемножителей 79, 81 и 80, 82 поступают сигналы, пропорциональные соответственно СУ 29
иА2 и Аз СУ 30. Сигналы с выходов перемножителей 79, 80 и 81, 82 поступают на первые входы операционных усилителей 83, 84 и на первые инвертирующие входы операционных усилителей 85, 86 соответственно. С их выходов сигналы поступают на вторые входы сумматоров 59-62 соответственно. Четыре функциональных узла, каждый из которых состоит из сумматора 59, перемножителя 79 и операционного усилителя 83, формируют продольные токи Ист fed1. i3dL Ud1 в СУ 29 и iidl is I, i 4d СУ 30 в соответствии с уравнениями
i id
А1 -AL
ь,
i2d
А
1 -АЬ
i3d .
1 +А|,
ib,
35
,i Аза . - id ib ,
+АЗ,
iVd
A2
1-A2
ib
lid -
Аз
1-Аз1
ib
a
На выходе сумматоров 55-58 формируются поперечные токи Hq1, i2q i ЗдГ i4qi-e СУ
29 И hq J4ql В СУ 30 В СООТВвТСТвии с уравнениями


| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный электродвигатель постоянного тока с ограниченным углом поворота | 1990 |
|
SU1757038A1 |
| Моментный электродвигатель постоянного тока | 1988 |
|
SU1629949A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1448373A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
Использование: в прецизионных электроприводах, от которых требуется повышенный ресурс работы и плавность хода ротора. Сущность изобретения: моментный вентильный электродвигатель содержит два Х%Я электромеханических преобразователей 1 и 2, каждый из которых состоит из статора 3 и ротора-индуктора 4, размещенных на одном валу 5 с нагрузкой между ними, два датчика линейных ускорений 7 и 8, якорные обмотки 9-16, расположенные на статорах, синусно- косинусный преобразователь 17, источник постоянного сигнала 18, задатчик момента 19, функциональные преобразователи 20- 23, масштабные преобразователи 24-28 и системы управления 29 и 30. Каждая система управления состоит из усилителей мощности 31-38, датчиков тока 39-46, сумматоров 47-62, перемножителеи 63-82 и операционных усилителей 83-86. Это позволяет повысить надежность и плавность хода при минимуме потерь в якорной обмотке 3 ил. сл С vi NJ Ч) 4 Ю Ю X 7 IZI I I I I .
С выходов функциональных преобразователей 20 и 22 сигналы, пропорциональные
А2 и Ai , поступают на блоки СУ 29, а с выходов функциональных преобразователей 21 и
23 сигналы, пропорциональные А2 и Аз1 , поступают на идентичные блоки СУ 30.
Источник 18 постоянного сигнала вырабатывает сигнал, пропорциональный ib, который поступает на первые входы
0
5
Hq Al i3q, Al
-At
Ai
ilq 4
W -Ai
+ АЗ
-Аг -Аз + A2 + Аз -A2 Аз + A2
(1)
Синусно-косинусный преобразователь 17 механически связан с роторами-индукторами 4 обоих ЭМП 1 и 2 и вырабатывает сигналы-, пропорциональные sin а и cos a , где а - угол поворота роторов индукторов 4. Сигнал, пропорциональный sin , поступает на первые входы перемножителей 71-78 СУ 29 и СУ 30, а пропорциональный cos a - на первые входы перемножителей 62-70 СУ
29и СУ 30, на вторые входы перемножителей 71 и 63 и 64, 73 и 65, 74 и 66, 75 и 67, 76 и 68, 77 и 69, 78 и 70 поступают сигналы, пропорциональные iid iiql i2dl lag i3di, iaqi, i4d Uq соответственно СУ 29 и hdl Hql1 i2d
i2q, i3dl iSql i4dl - Uql СУ 30. С ВЫХОДОВ
перемножителей 63-70 сигналы поступают на первые входы сумматоров 47-54 восьми каналов формирования якорныхтоков СУ 29 и СУ 30. На вторые инвертирующие входы сумматоров 47, 49, 51 и 53 поступают сигналы с перемножителей 72, 74, 76 и 78, а на вторые входы сумматоров 48, 50, 52 и 54 - с перемножителей 71, 73, 75, 77 соответственно. На выходах сумматоров 47-54 формируются требуемые оптимальные токи
НА01 i2B0l;i3A0lMi3B° -ИД01 |4В° СУ
30И i2B°, iSB0 1 i4A° L
ив° СУ 30, которые сформированы синус- но-косинусным преобразователем 17, перемножителями 63-78, сумматорами 47-54 СУ 29 и СУ 30 в соответствии с известными формулами
IA idcos a - iqsin a-, IB idsin a- + iqcos a-.
Эти токи, проходя через усилитель мощно- сти, запитывают восемь фаз якорной обмотки каждого ЭМП 1 и 2, обеспечивают создание тангенциальных (Ft F2 , Рз , F4 FI Fs , F4 ) и радиальных (F2r F2r Рзг1 F4r F2r электромагнитных сил, действующих на роторы в каждом секторе и удовлетворяющих следующим условиям:
2 Mzj (Fi + F2j + Fsj + F4 j)R - M0j 0; (2)
Ј Fxj Firj - F3rJ + FA j - F2 J - Fxj 0; (3) Ј Fyj - F2rj - F4rj + Fij - F3 j - Fyj 0, (4) где j - номер ЭМП;
Nx Fx Fy - сумма моментов вокруг оси z и сумма электромагнитных сил и сил инерции на осях х и у соответственно для j-ro ЭМП.
Силы инерции, компенсируемые каждым ЭМП, определяются из системы уравнений
Fx + Fx
FX;
Fy + Fy Fy;
10
Fyf,, - Fyfn - 0; Fxf, - 0,
(5)
где Fx, Fy - силы инерции, действующие на оба ЭМП и образованные линейными уско- 15 рениями Wx и Wy в соответствии с равенствами
Fx mWx, Fy mWy
(6)
20 Решая систему уравнений (5) с учетом (6), получим
Fx1 -- KiWx, Fx KiiWx, Fy KiWy. Fy KnWy.
(7)
где KI
m fn
fi + In
Момент нагрузки распределяется между двумя ЭМП поровну: Мс
м I м II Мо Mo - Mo -у-
(8)
Электромагнитные силы, сформированные в обоих ЭМП в соответствии с равенствами (2)-(4), создают требуемый электромагнитный момент и компенсируют действие радиальных сил инерции и радиальных сил, возникающих из-за того, что центр масс вала и узлов, размещенных на нем, не лежат в плоскости поперечного сечения проходящей через середину активной зоны ЭМП, благодаря чему опоры ЭМП разгружаются, что увеличивает ресурс работы двигателя и повышает плавность хода ротора.
Равенства (1) получаются в результате решения задачи на условный экстремум с тремя ограничениями типа равенства методом множителей Лагранжа; найти токи д -г л .1 л ,с Л .S Л л Л .5
,ity L1d l1.L2 l L2tii3ct,
удовлетворяющие соотношениям
«l-iS Wigr
+ 1
;ОГ
VJ
« ч
Id
. mz
f
.
j
I Л Г.. I
-Fi/c-0,(«)
YJ4 i-i/oi-jdf(iH-;H)-ФС j.l.ilC«)
где V0 - функция цели;
VM2J, VFXJ, FpyJ - ограничения типа равенства.
Здесь уравнение (9) - условие минимума потерь в обмотке якоря, уравнение (10) соответствует получению требуемого электромагнитного момента М0 уравнения (2), а уравнения (10) и (11) соответствуют условию равновесия приложенных к ротору радиальных сил по осям х и у (уравнения (3) и (4)). Функция Лагранжа и условия ее стационарности по токам имеют вид
v-o,5vJ iviM 1ftvJFJC ivJY stet,
gwi ,
9Ј/й- 110(Ч + «)-°
d
V- L- ya(ib + iJd)-°
9V2d
Д i i -
ijTr- ld l-oK 0,
чХза(
4o
3Vj ,j i J
,-o,
H 3V , j :
SJT-VV. 0
9vJ H
avi
,,
avF V 0
4(
j.I.II.
ткуда получаем
.i U ,j
J1
w -v;0v
,j ko ,j
rt I I1 t
t7lJ2Q ь
,- ..U.|i 4d p b
4d J
{.
,
1
tf
Подставляя значения токов в уравнения (1012), получим
,
(()a
+ i-pi/c,
(13) 04)
)a ; j
(i- vV+n Fv/c JgI-n (5)
С учетом системы равенств (7) и (8) и принимая во внимание, что оба ЭМП идентичные, 20 выражения (13)-(15) примут вид V - -Me/aRc, (46)
а г«оач
KI.
..«Я
.,fffl
.. f 5)
uH /o it tr KIT /-iri
,EWY (20)
(-«™V)
Множители Лагранжа реализуются в СУ МВД в виде конкретных блоков:
AI - в виде блока масштабного преобразователя 24, a KI , Кг , Аз , Аз - в виде блоков функциональных преобразователей 20-23, функции которых определяются уравнениями 16-19 в неявном виде. Для настройки функциональных преобразователей целесообразно задаться значениями 2,2,Яз,Аз, определить значения Wx и Wy и составить таблицу.
Таким образом, благодаря введению четырех масштабных и двух функциональных,
а также ЭМП и СУ идентичных имеющимся. в якорных обмотках обоих ЭМП формируются токи, которые создают, кроме требуемого электромагнитного момента, электромагнитные силы, разгружающие подшипники
от радиальных усилий со стороны ротора, возникающих под действием линейных ускорений, действующих на двигатель, и под действием моментов, образованных в результате того, что центр масс вала и всех
узлов, размещенных на нем, не расположен в плоскости поперечного сечения, проходящей через середину активных зон ЭМП. Предлагаемое изобретение позёоляет увеличить ресурс работы моментного вентильного электродвигателя и повысить плавность хода ротора при сохранении положения оси ротора относительно статора и минимуме потерь.
Наибольший эффект достигается при условии работы МВД на подвижном основании.
Формула изобретения Моментный вентильный электродвигатель по авт.св. Ns 1624617, отличающийся тем, что, с целью повышения надежности и-плавности хода при минимуме потерь в якорной обмотке, в него введены третий и четвертый функциональные преобразователи, четыре масштабных преобразователя и второй электромеханический преобразователь с системой управления, выполненные идентично первым, ротор,введенного электромеханического преобразователя расположен на одном валу с ротором первого электромеханического преобразователя симметрично относительно нагрузки, выход первого датчика линейных ускорений через введенные второй и четвертый масштабные преобразователи с коэффициентами преобJ .. к,,
соразования KI „ - -у+|Г
ответственно подключен к входам первого и третьего функциональных преобразователей, выход второго датчика линейных ускорений через введенные третий и пятый масштабные преобразователи с коэффициентами преобразования К| и Кц соответственно подключен к входам второго и четвертого функциональных преобразователей, выходы третьего и четвертого функциональных преобразователей подключены к перемножителям и сумматорам второй системы управления аналогично тому как выходы первого и второго функциональных
преобразователей подключены к идентичным перемножителям и сумматорам первой системы управления, введенные функциональные преобразователи выполнены с возможностью реализации функции
(Wx), (Wy) соответственно определяемых равенствами
ц wx
-STTi - n-T-
()
111 Ml
n WY .
0
5
0
5
1 1 где А.2 , Лз - множители Лагранжа задачи на
условный экстремум;
Wx, Wy - линейные ускорения датчиков линейных ускорений;
IB - эквивалентный ток возбуждения ротора индуктора;
С - коэффициент, связывающий поперечную составляющую тока сектора с тангенциальной электромагнитной силой;
а - постоянный коэффициент;
KI и Км - коэффициенты преобразования второго и четвертого масштабных преобразователей;
m - масса вала и всех узлов, размещенных на нем;
Pi, PII - расстояние на оси вращения от центра масс узлов, размещенных на валу до середины активных зон первого и второго электромеханических преобразователей соответственно.
,%
Фиг 1
8
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
