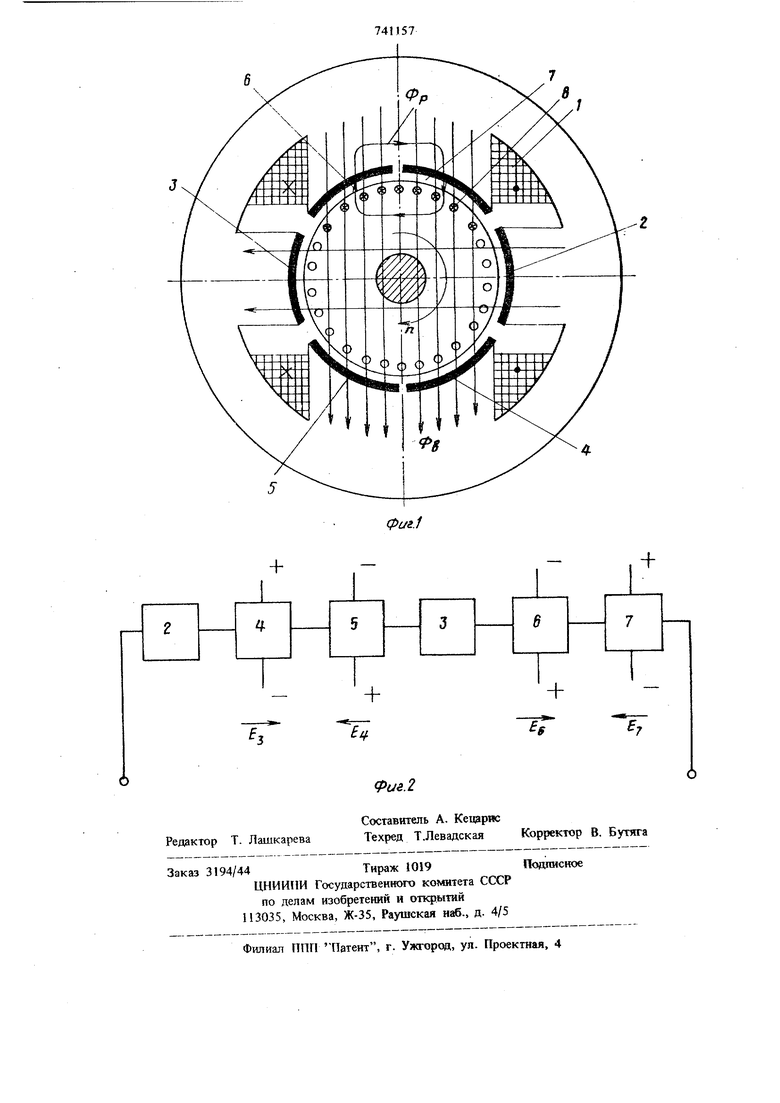
с выходньнуга цепями датчиков ЭДС Холла других полюсов, образуя сигнальную цепь тахо- нератора. Ротор 8 выполнен по типу беличьей клетки. При неподвижном роторе на каждый датчик ЭДС Холла одного полюса обмотки возбуждения действует одинковый по величине магнитный потокЯ /2ЭДС датчиков 4 и 5, 6 и 7 одинаковы по величине, действуют встречно и выходная ЭДС каждой пары датчиков равна нулю, то есть сигнал на выходе сигнальной цепи тахогеиератора отсутствует. При вращении ротора со скоростью п возникает магнитный поток реакции ротораФр, создаваемый токами ротора (показаны крестиками на фиг. 1). Величина Pg РО порциональна скорости вращения ротора п. Датчик 6 будет находиться в зоне действия результирующего магнитного потока , датчик 7 - в зоне действия магнитного потока е + 2 Равенство ЭДС датчиков нарушается и на выход появляется ЭДС Ецц, равная разности ЭДС дагшков E-J и Eg, Так как ЭДС датчика Холла пропор1щональна магнитному потоку, действующ му на него, то выходная ЭДС пары датчиков равна: ((«6/2-% 2w p Kn. Суммируясь с выходной ЭДС датчиков Холл других полюсов, она образует выходную ЭДС сигнальной цепи тахогенератора. При изменении направления вращения поток изменяет напрайт ление, а ЭДС на выходе сигнальной цепи изменняет полярность. Предлагаемый тахогенератор обладает более высокой крутизной сигнала, чем известный тахо генератор с датчиками ЭДС Холла, так как для размещения датчиков использована активная поверхность всех полюсов статора и в создании сигнальной ЭДС участвует вновь поток ротора, а не часть его как в прототипе 2. Тахогенератор может быть выполнен с полым немагнитным ротором,, что позволяет разворотом и последующим закреплением В1утреннсго сердечника с размещенными на нем датчиками Холла скомпенсировать нулевой сигнал сигнальной цепи, вызванный неточностью изготовления магнитной цепи, неточностью размещения датчиков Холла, разницей их параметров, и т.д. Возможен также вариант изготовления ротора в виде массивного ферромагнитного цилиндра, что позволяет при высокой крутизне сигнала избежать зубовых пульсаций в выходном сигнале, присущих тахогенератору с зубчатым ротором типа беличья клетка Видоизмененный тахогенератор может не содержать полюсов по поперечной оси с датчиками ЭДС Холла 2 и 3 (фиг. I). В этом случае на их место помещают полюса с обмоткой возбуждения и датчиками ЭДС Холла, размещенными попарно симметрично и соединенными последовательно - встречно. Формула изобретения Реверсивный бесконтакт1П)1Й тахогенератор постоянного тока, содержащий на статоре полюса с обмоткой возбуждения и полюса с размещенными на них датчиками ЭДС Холла, подклю4eHHbiNiH к источнику постоянного тока и на роторе - короткозамкнутую обмотку, отличающийся тем, что, с целью повышергая крутизны характеристики тахогенератора, на каждом полюсе с обмоткой возбуждения размещены относительно оси поЛюса по меньшей мере два; датчика ЭДС Холла, причем выходные цепи датчиков ЭДС Холла, принадлежащих одному полюсу с обмоткой возбуждения, соединены последовательно-встречно между собой и последовательно согласно с выходными цепями датчиков ЭДС Холла других полюсов. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3317767, кл. 310-166, 1967. 2.Авторское свидетельство СССР № 134919, кл. G 01 р 3/46, 1961 (прототип).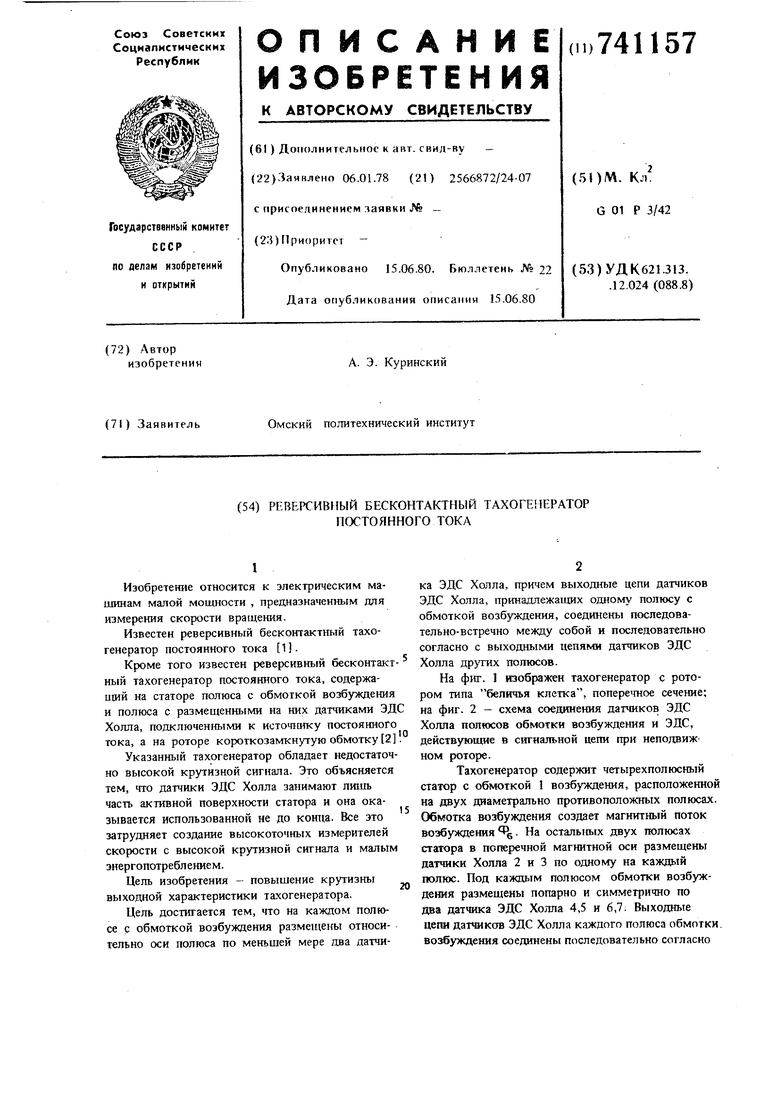

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный бесконтактный тахогенератор постоянного тока | 1973 |
|
SU458075A1 |
| Реверсивный бесконтактный тахогенератор постоянного тока | 1980 |
|
SU1775670A1 |
| Совмещенный коллекторный двигатель-тахогенератор | 1988 |
|
SU1582288A1 |
| Бесконтактный тахогенератор постоянного тока | 1972 |
|
SU484461A1 |
| Вентильный электродвигатель | 1980 |
|
SU1120459A1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |
| Электромашинный импульсный генератор | 1979 |
|
SU873340A1 |
| Асинхронный тахогенератор постоянного тока | 1980 |
|
SU972406A1 |
| Регулируемая электромагнитная муфта | 1978 |
|
SU782074A1 |
| Вентильный электродвигатель с тахометрическим генератором | 1985 |
|
SU1419531A3 |