Изобретение относится к регуляторам скорости, в частности, при транспортировании пленки в проявочных машинах, используемым в полиграфическом производстве.
Известен преобразователь частоты в напряжение, дополненный блоком цифроа- налогового преобразования на выходе. Для повышения точности он требует снижения быстродействия и усложнения конструкции.
Известен регулятор скорости, содержащий последовательно соединенные аналоговый блок сравнения, блок управления электродвигателем и импульсный датчик скорости, а также преобразователь частоты в напряжение, выход которого соединен с первым входом аналогового блока сравнения, задатчик скорости
Недостатком описанного устройства является снижение точности регулирования за
счет погрешностей в преобразователях частоты в напряжение. Точность регулирования в значительной степени компенсируется наличием цифрового интегратора, а это усложняет конструкцию.
Цель изобретения - повышение точности регулирования скорости и упрощение конструкции.
Поставленная цель достигается тем, что в регуляторе скорости, содержащем последовательно соединенные аналоговый блок сравнения, блок управления электродвигателем и импульсный датчик скорости, а также преобразователь частоты в напряжение, выход которого соединен с первым входом аналогового блока сравнения и задатчик скорости, преобразователь частоты в напряжение выполнен в виде интегратора со сбросом, вход сброса которого соединен с
Х| XI
сл XJ
х4
выходом импульсного датчика скорости, а информационный вход- с выходом задатчи- ка скорости, вход опорного напряжения которого соединен со вторым входом аналогового блока сравнения, выполненного в виде алгебраического сумматора с усреднением, входы которого являются входами блока. При этом регулятор скорости содержит также блок выборки-хранения, информационным входом и выходом включенный между выходом интегратора с блока сравнения, а управляющим входом подключенный к выходу импульсного датчика скорости.
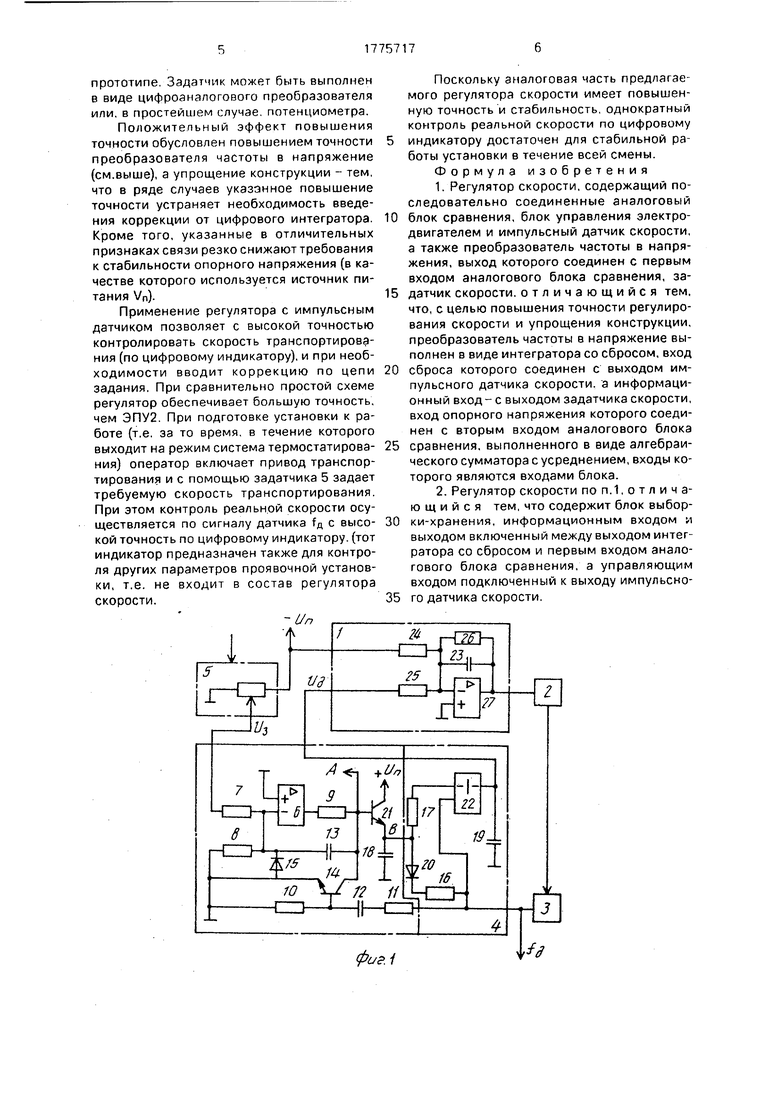
На фиг.1 изображена блок-схема предлагаемого регулятора скорости и один из их вариантов исполнения его блоков; на фиг.2 - диаграмма работы преобразователя частоты в напряжение.
Регулятор скорости содержит последовательно соединенные аналоговый блок сравнения 1, блок управления электродвигателем 2, импульсный датчик скорости 3 преобразователь частоты в напряжение 4, выходной сигнал которого Va подан на вход аналогового блока сравнения 1, и задатчик 5.
В процессе работы, благодаря действию обратной связи, стабилизируется выходной сигнал датчика Тд и выходной сигнал преобразователя Уд. При изменении сигнала задания V3 изменяется выходной сигнал датчика тд, но выходной сигнал преобразователя Уд по-прежнему равен опорному сигналу Vn . Наличие на входах блока сравнения 1 неизменных во всем диапазоне задания сигналов Vn и Уд и что особенно важно постоянство установившегося значения сигнала Уд является существенным отличием в алгоритме работы, которое обусловлено отличительными признаками устройства.
Положительный эффект повышения точности регулирования связан с повышением точности работы преобразователя частоты в напряжение. Действительно, в прототипе выходной сигнал преобразователя Уд должен быть равен сигналу задания Уз, т.е, может изменяться в десятки раз. А при малых значениях Уд возрастает относительная погрешность преобразования. В предлагаемом устройстве Уд - величина постоянная (в статике) и незначительно изменяется (в динамике) для обеспечения регулирования по обратной связи. При этом установившееся значение Уд может быть выбран в соответствии с оптимальным режимом работы преобразователя 4. В связи с этим преобразователь 4 может быть собран по простой схеме, вариант которой
содержит обнуляемый интегратор (элементы 6-15) и может быть дополнен схемой выборки-хранения на выходе элементы (16-22).
Поскольку блоки 1 и 4 обладают повышенной точностью работы из-за постоянства сигнала Уд, статическая погрешность регулирования может быть дополнительно уменьшена введением интегрирующей це0 пи (конденсатора) 23 в состав блока сравнения 1, который состоит из суммирующего усилителя на элементах 24-27
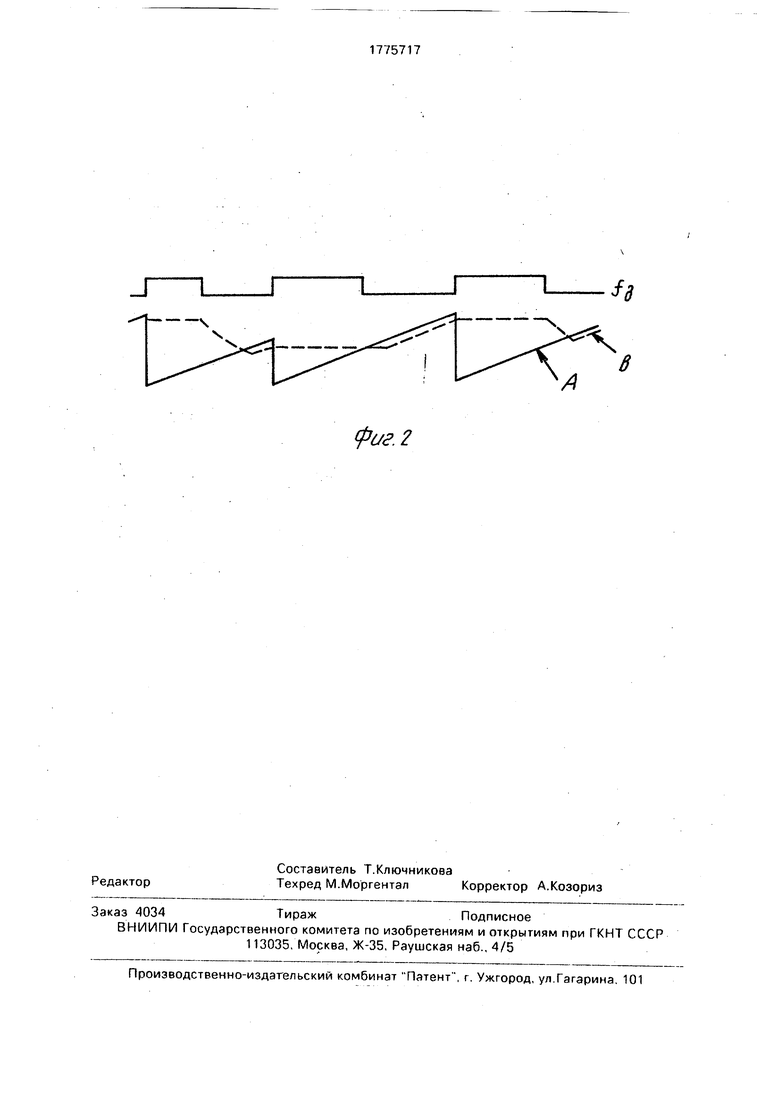
Работа варианта исполнения преобразователя 4 поясняется на фиг.2. По положи5 тельному фронту сигнала датчика тд коротким импульсом, сформированным цепью из элементов 10, 11, 12, 14, разряжается интегрирующий конденсатор 13. Диод 15 предназначен для ускорения разряда, а
0 резистор 8 - для уменьшения остаточного напряжения на диоде, причем номинал резистора 8 может быть тем меньше, чем выше усилие усилителя 6. После окончания разрядного импульса конденсатор 13 заряжа5 ется со скоростью, пропорциональной сигналу задания У3.
Таким образом, амплитуда пилообразного напряжения на конденсаторе 13 (сигнал А) пропорциональна сигналу задания У3
0 и обратно пропорциональна частоте тд.
В простейшем случае сигнал А может быть использован вместо сигнала Уд, но для подавления переменной составляющей на частоте Тд необходимо увеличить емкость
5 23, т.е. снизить быстродействие системы. Итак, при увеличении частоты тд уменьшается амплитуда и постоянная составляющая сигнала А, увеличивается выходной сигнал усилителя 27 и при соответствующем выбо0 ре структуры блока 2 обратная связь стремится уменьшить частоту ffl.
При использовании одного из вариантов схемы выборки-хранения пиковое напряжение сигнала А запоминается на
5 конденсаторе 18 (пунктирная кривая В) и во время положительного импульса тд, открывающего электронный ключ 22, передается на запоминающий конденсатор 19. При нулевом уровне сигнала тд ключ 22 заперт, а
0 конденсатор 18 разряжается, но не более, чем до уровня напряжения А. Очевидно, что при равенстве амплитуд импульсов А переменная составляющая на конденсаторе 19 отсутствует, что позволяет дополнительно
5 повысить точность и быстродействие.
Для дальнейшего уменьшения статической погрешности может использоваться цифровое интегрирование сигнала тд с корректирующим воздействием по входу Задание аналогично тому, как это описано в
прототипе. Задатчик может быть выполнен в виде цифроаналогового преобразователя или. в простейшем случае, потенциометра.
Положительный эффект повышения точности обусловлен повышением точности преобразователя частоты в напряжение (см.выше), а упрощение конструкции - тем, что в ряде случаев указанное повышение точности устраняет необходимость введения коррекции от цифрового интегратора. Кроме того, указанные в отличительных признаках связи резко снижают требования к стабильности опорного напряжения (в качестве которого используется источник питания Vn).
Применение регулятора с импульсным датчиком позволяет с высокой точностью контролировать скорость транспортирования (по цифровому индикатору), и при необходимости вводит коррекцию по цепи задания. При сравнительно простой схеме регулятор обеспечивает большую точность, чем ЭПУ2. При подготовке установки к работе (т.е. за то время, в течение которого выходит на режим система термостатирова- ния) оператор включает привод транспортирования и с помощью задатчика 5 задает требуемую скорость транспортирования. При этом контроль реальной скорости осуществляется по сигналу датчика fA с высо- кой точность по цифровому индикатору, (тот индикатор предназначен также для контроля других параметров проявочной установки, т.е. не входит в состав регулятора скорости.
- Un
Поскольку аналоговая часть предлагаемого регулятора скорости имеет повышенную точность и стабильность, однократный контроль реальной скорости по цифровому индикатору достаточен для стабильной работы установки в течение всей смены.
Формула изобретения
1.Регулятор скорости, содержащий последовательно соединенные аналоговый блок сравнения, блок управления электродвигателем и импульсный датчик скорости, а также преобразователь частоты в напряжения, выход которого соединен с первым входом аналогового блока сравнения, за- датчик скорости, отличающийся тем, что, с целью повышения точности регулирования скорости и упрощения конструкции, преобразователь частоты в напряжение выполнен в виде интегратора со сбросом, вход сброса которого соединен с выходом импульсного датчика скорости, а информационный вход- с выходом задатчика скорости, вход опорного напряжения которого соединен с вторым входом аналогового блока сравнения, выполненного в виде алгебраического сумматора с усреднением, входы которого являются входами блока.
2.Регулятор скорости по п. 1, о т л и ч а- ю щ и и с я тем, что содержит блок выборки-хранения, информационным входом и выходом включенный между выходом интегратора со сбросом и первым входом аналогового блока сравнения, а управляющим входом подключенный к выходу импульсного датчика скорости.
J
S3

| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ПРИВОДА ШВЕЙНОЙ МАШИНЫ | 1992 |
|
RU2026906C1 |
| Устройство управления летучими ножницами, снабженными механизмом выравнивания скоростей | 1990 |
|
SU1712080A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Система управления реверсивным правильно-растяжным станом | 1982 |
|
SU1085654A1 |
| Цифроаналоговое устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712078A1 |
| ПРОГРАММНОЕ УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ПРЕССОВАНИЯ НА ГИДРАВЛИЧЕСКОМ ПРЕССЕ | 1986 |
|
SU1415608A1 |
| Электропривод | 1979 |
|
SU1023605A1 |
| Устройство для регулирования расходов компонентов при смешении | 1977 |
|
SU696422A1 |
| Комбинированная система регулирования скорости электродвигателя постоянного тока | 1984 |
|
SU1233254A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
Изобретение относится к регуляторам скорости, например, транспортирования пленки в проявочных машинах, используемым в полиграфическом производстве, Цель изобретения - повышение точности регулирования скорости и упрощение конструкции. Для достижения этой цели преоб- разователь 4 частоты в напряжение выполнен в виде интегратора со сбросом
A
(рае. 2
| Файнштейн В Г., Файнштейн Э.Г | |||
| Микропроцессорные системы управления тиристорными электроприводами | |||
| М. | |||
| Энергоатомиздат | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Упругое экипажное колесо | 1918 |
|
SU156A1 |
| Под ред | |||
| В.А.Елисеева и А.В.Шинянско- го Справочник по автоматизированному электроприводу М. | |||
| Энергоатомиздат, рис | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
