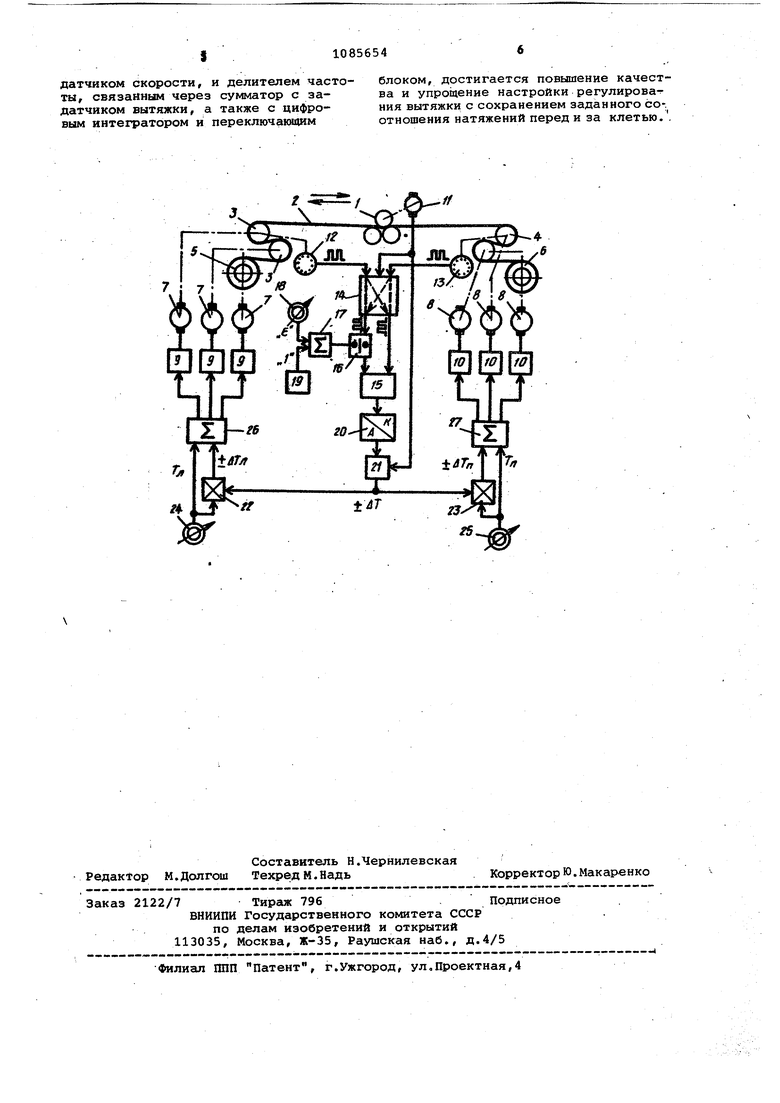
Изобретение относится к области автоматизации прокатного производства и может применяться для автоматического управления реверсивными дрессировочными, правильно-дрессировочными и правильно-растяж.ными станами. Наиболее близкой к предложенной по технической сущности и достигаемому эффекту является система управ :ления эеверсивным правильно-растяж ным станом с правильной клетью и установленными симметрично по обе стороны относительно нее натяжными роликами и моталкой,.содержащая при воды натяжных .роликов и моталки, со единеннь а с блоками регулирования и совместные с натяжными роликами задатчики натяжений, а также переключающий блок и соединенные с ним импульсные датчики натяжных роликов и датчик скорости правильной клети, подключенный к первому выходу переключающего блока цифровой интегратор и последовательно с ним включен ный преобразователь код-аналог, а также, сумматор,- задатчик вытяжки и два умножителя Cl . Недостатком известной системы яв ляется то, что задание вытяжки формируется путем генерирования дополнительных импульсов, соответствующих удлинению полосы на выходе из клети, которые суммируются с опорны ми импульсами, соответствующими неудлиненной полосе на входе в клеть, по-сле отсчета базовой длины на входе в клеть. При этом возникают бие ния частоты импульсов перемещения н удлиненной полосы и колебания натяж ний полосы с соответствующим ухудше нием ее качества. Кроме того, велич на вытяжки задается не непосредстве но, а через задание базовой длины, чем усложняется настройка системы. - Не обеспечивается также при рагу лировании вытяжки стабильность зада ного соотношения натяжений перед и за клетью, поскольку регулирующее воздействие прикладывается лишь к одному из натяжных роликов, и не оп тимизируются динамические свойства системы регулирования вытяжки ввиду отсутствия регулятора вытяжки, чем ухудшается качество регулирования. Цель изобретения - повышение качества и упрощение настройки регули рования вытяжки с сохранением задан ного соотношения натяжений перед и за правильной клетью. Поставленная цель достигается тем, что система управления реверсивным правильно-растяжным станом с правильной клетью и установленными симметрично по обе стороны относительно нее натяжными роликами и моталкой, содержащая приводы натяжных роликов и моталки, соединенные с блокамирегулирования их, связанные с натяжными роликами задатчики натяжений, а также переключающий блок и соединенные с ним импульсные датчики натяжных роликов, датчик скорости правильной клети, подключенный к первому выходу переключающего блока цифровой интегратор и последовательно с ним включенный преобразователь код-аналог, э также сумматор, задатчик вытяжки и два умножителя, снабжена двумя сумматорами, выходы каждого из которых соединены с блоком регулирования натяжных роликов и моталки, а входы соответствен-г Ни -первый -.с задатчиком натяжения, а второй - с выходом умножителя, первый вход каждого из которых подключен к задатчику натяжения, регулятором вытяжки, вь1ход которого соединен с вторыми входами умножителей, первый вход соединен свыходом преобразователя код-аналог, -а второй вход с датчиком скорости правильной клети, делителем частоты, выход которого соединен с вторым входом цифрового интегратора, первый вход - с вторым выходом переключающего блока, а второй вход - с выходом сумматора, к входу которого подключен задатчик вытяжки, ИСТОЧНИКОМопорного числа, соединенным с вторым входом сумматора. На чертеже приведена функциональная схема предлагаемой систелвл. Правильно-дрессировочная клеть 1 прокатывает полосу 2. Натяжение полосы 2 слева и справа от клети 1 создается соответственно натяжными роликами 3 .и 4 и моталками 5 и 6, имеющими приводы 7 и 8 соответственно с блоками регулирования 9 и 10 соответственно. С клетью 1 механически связан датчик 11 скорости, а с натяжными роликами 3 и 4 соответственно импульсные датчики 12 и 13. Датчики 11-13 электрически связаны с переключающим блоком 14, к двум выходам которого подключены соответственно входы цифрового интегратора 15 и делителя 16 частоты. К второму входу последнего подключен выход сумматора 17, вхо№ которого соединены с задатчиком 18 вытяжки и источником 19 опорного числа. Цифровой интегратор 15 соединен последовательно с преобразователем 20 код-аналог и регулятором 21 вытяжки. Второй вход последнего соединен с датчиком 11 скорости, а выходс входами умножителей 22 и 23. Вторые входы умножителей 22 и 23 соединены с выходами задатчиков 24 и 25 натяжения и с первыми входами сумматоров 26 и 27 соответственно. Вторые
входы последних соединены с выходами умножителей 22 к 23, а выходы -d входами блоков регулирования 9 и 10 соответственно.
Работа системы происходит следующим образом.
Перед пуском стана, исходя из параметров прокатываемой полосы, задат чиками 24 и 25 устанавливаются натяжения Тд, Т„полосы 2 перед и за клетью 1. Натяжение полосы 2 перед и за клетью 1 создается за счет суммы моментов соответственно приводов 7 и 8 натяжных роликов 3, и моталок 5 и 6. При стоянке стана V 0, выход регялятора 21 вытяжки нулевой и соответственно нулевыми являются выходы умножителей 22 и 23.
При пуске стана по сигналу датчика . 11 скорости переключающий блок 14 подключает импульсные датчики 12 tf. 13 к входам цифрового интегратора 15 и делителя 16 частоты так, что датчик перед клетью 1 всегда подключается к цифровому интегратору 15, а датчик за клетью 1 - всегда к делителю 16 час,тоты. Если при одном направлении прокатки датчиком перед клетью 1 является левый импульсный датчик 12, а датчиком за клетью 1 правый импульсный датчик 13, то при реверсе стана датчики 12 и 13 меняются местами.
Делитель 16 частоты снижает частоту импульсного датчика 12 (13) за клетью 1 соответственно збщаннрй задатчиком 18 вытяжке удлиненной полосы -2 на выходе из клети 1.
Вытяжка Ё полосы 2 в клети 1 определяется выражением
Ь. - L
L
вЬ(Х ВХ
-Bbji. . 1,(1)
L вх
В
где , Lg - измеренные в одном интервале времени соответственно длина элемента удлиненной полосы 2 за клетью и длина элемента нетудлиненной полосы 2 ;перед клетью 1.
При одинаковых диаметрах натяжных роликов 3 и 4 выражение (1) можно перепирать в виде
SbfX
4
вх
или
(2)
о.
- f
ex
где fjy , частота импульсов импульсного датчика 12 и 13 соответственно за и перед клетью 1.
Для решения уравнения (2) делитель 16 частоты должен уменьшить частоту fpj,x импульсного датчика за клетью 1 в (1+6) раз. Число.(1+ Е ) образуется сумматором 17 благодаря подводу к его входам заданного зна-чения вытяжки от задатчика 18 и f опорного числа 1 от источника 19.. Цифровой интегратор 15 обеспечивает решение управнения 2 , поскольку к его входам подводятся импульсы частотой f от импульсного
10 датчика перед клетью 1 и fg,/
( 1+) - от импульсного датчика за
клетью 1, через делитель 16 частоты
Если вытяжка полосы 2 соответствует
заданной , то частоты fg и f.ej,,/
t5 {1-1- g ) равны и выход цифрового интегратора 15 нулевой. В противном
/ случае,т.е. при отклонении вытяжки полосы 2 от зада.нной, на выходе интегратора 15 образуется число соот20 ветствующегр знака, которое образу.ется преобразователем 20 код-аналог в аналоговый сигнал. Последний преобразуется регулятором 21 вытяжки в сигнал ± л Т коррекции растяжения :
25 полосы 2. Одновременно с этим регулятором 21 вытяжки обеспечивается оптимизация динамических свойств регулирования вытяжки, т.е. быстродействие и перерегулирование. Связь
,Q регулятора 21 вытяжки с датчиком 11 скорости учитывает изменение динамических свойств объекта регулирования вытяжки при изменении скорости про -катки V.
Сигнал ±4 Т умножителями 22 и 23
преобразуется в сигналы коррекции натяжений полосы 2 соответственно: слева от клети 1 - 4Тд 4Тдд Т справа от клети 1- ЛТ знак.+ соответствует увеличению
40 натяжения, а знак - - уменьшению). .При этом результирующее натяжение полосы 2, обуславливаемое сумматорами.
; 26 и 27, становится равным
слева от клети 1 - Tдf Тд + Тд yiT
45 справа от клети 1- Т„ Т ± Тр, дТ
Из выражений (3) следует, что, несмотря на изменение растяжения 2, соотношение натяжений слева. и .справа от клети 1 не и йменялось,
50 т.е.Тл1.
Тп, Тп
При этом не вносятся возмущения в процессе прокатки на стане.
55 Таким образом, благодаря допол1 нению системы левым и правым сумматорами, связанными с блоками регулиг рования соответственно левых, правых натяжных роликов и моталок, а
60 также с задатчйками натяжения, умно. .жителями, связанными соответственно с левым и правым сумматорами и за;датчиками натяжения, регулятором вытяжки связанным с преобразовате-
5 лем код-аналог, с умножителями и с
датчиком скорости, и делителем частоты, связанным через сумматор с задатчиком вытяжки, а также с цифровшл интегратором и переключающим
блоком, достигается повышение качества и упрощение настройки регулирова-г НИН вытяжки с сохранением заданного со-, отношения натяжений перед и за клетью..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления реверсивным правильно-дрессировочным станом | 1980 |
|
SU884768A1 |
| Устройство управления скоростными режимами непрерывного стана горячей прокатки | 1976 |
|
SU595024A1 |
| Устройство для автоматического управления моталкой непрерывного стана холодной прокатки | 1984 |
|
SU1202653A1 |
| Устройство для регулирования толщины полосы на прокатном стане | 1991 |
|
SU1794518A1 |
| Устройство для коррекции уставки натяжения на моталке стана холодной прокатки | 1982 |
|
SU1050771A1 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1989 |
|
SU1667972A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU984530A1 |
| Устройство регулирования положения измерительного облика датчиков натяжения и формы движущейся полосы | 1981 |
|
SU992107A1 |
| Устройство регулирования натяжения полосы в станах холодной прокатки | 1984 |
|
SU1227278A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU998526A1 |
СИСТЕМА УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ПРАВИЛЬНО-РАСТЯЖНЫМ СТАНОМ с правильной клетью и установленными симметрично по обе стороны относительно нее натужными роликами и моталкой, содержащая приводы натяжных роликов и моталки, соединенные с блоками регулирования их, связанные с натяжными роликами задатчики натяжений, а также переключаюодай блок и соединенные с ним импульсные датчики натяжных роликов, датчик скорости правильной клети, подключенной в первому выходу переключающего блока цифровой интегратор и последовательно с ним включенный преобразователь код-аналог, а также сумматор, задатчик вытяжки и два умножителя, отличающаяс я тем, что, с целью повьипения качества и упрощения настройки регулирования вытяжки путем сохранения заданного соотношения натяжений перед и за-правильной клетью, она снабжена двумя сумматорами, выходы каждого из которых соединены с блоком регулирования натяжных роликов и моталки, а входы соответственно первый - с задатчиком натяжения, а второй - с выходом умножителя, первый вход каждого из которых подключен к задатчику натяжения, регулятором вытяжки, выход которого соединен с вторыми входами умнозкителей, 9 первый вход соединен с выходом преобразователя код-ангшог, а второй вход - с датчиком скорости правильной клети, делителем частоты, выход которого соединен с вторым входом цифрового интегратора, первый вход - S с вторым выходом переключающего блока, а второй вход - с выходом сумматора, к входу которого подключен задатчик вытяжки, источником опор00 ного числа, соединенным с вторым ел ;входом сумматора. ОГ) 01 4
4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| , | |||
