(54) УСТРОЙСТВО ДЛЯ ВВОДА ГРАФИЧЕСКОЙ ИНФОРМАЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контролируемого пункта | 1983 |
|
SU1211784A1 |
| Устройство телемеханики | 1983 |
|
SU1193712A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| Устройство для управления вентильным преобразователем со слежением | 1988 |
|
SU1607061A1 |
| Аналого-цифровой преобразователь | 1985 |
|
SU1322477A1 |
| Устройство для считывания графической информации | 1981 |
|
SU1013989A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| Автоматический измеритель пороговых напряжений логических схем | 1985 |
|
SU1372255A1 |
| Регистратор гальванических связей | 1981 |
|
SU993165A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА КАНАЛОВ РАДИОСВЯЗИ | 2011 |
|
RU2450447C1 |
Изобретение относится к автоматике и вычислительной технике и предназначено для ввода графической информации .
Известно устройство оперативного графического взаимодействия, содержащее блок визуальной информации на ЭЛТ, блок формирования графических изображений, блок обработки, блок памяти, блок сопряжения, световое перо, клавиатуру 1.
Недостатками этого устройства являются сложность и недостаточно высокая точность.
Наиболее близким техническим решением к данному изобретению является устройство для ввода графической информации, содержащее привод/ считывающий элемент, соединенный с блоком формирования сигналов, первый и второй блоки управления, выходы которых соединены с соответствующими входами первого и второго коммутаторов, выходы которых подключены к приводу 2.
Недостатком указанного устройства является значительная погрешность при вводе кривых сложной формы.
Цель изобретения - повышение точности устройства.
Поставленная цель достигается тем, что устройство содержит последовательно соединненые первый дешифратор,первый шифратор и первый инвертор, первый и второй компараторы, второй и третий инверторы, элемент И-НЕ, последовательно соединенные
10 второй дипифратор, второй шифратор и регистр, выход которого подключен к первому входу второго блока управления, вход второго дешифратора соединен с выходом блока формирования
15 сигналов и входом первого дешифратора, выход считывающего элемента подключен к одним входам, первого и второго компараторов, другие входы которых соединены с источниками пороговых напря20жений, выходы соответственно - с первым входом элемента И-НЕ и входом второго инвертора, выход которого подключен к второму входу элемента И-НЕ, третий вход которого соединен
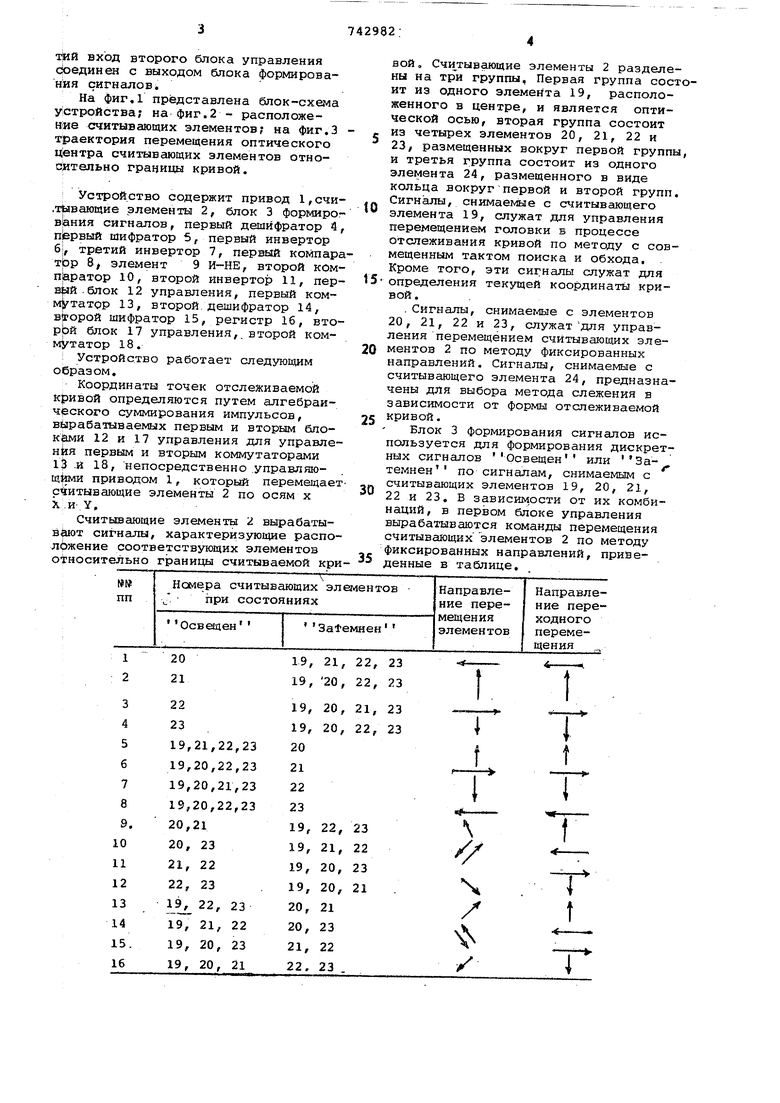
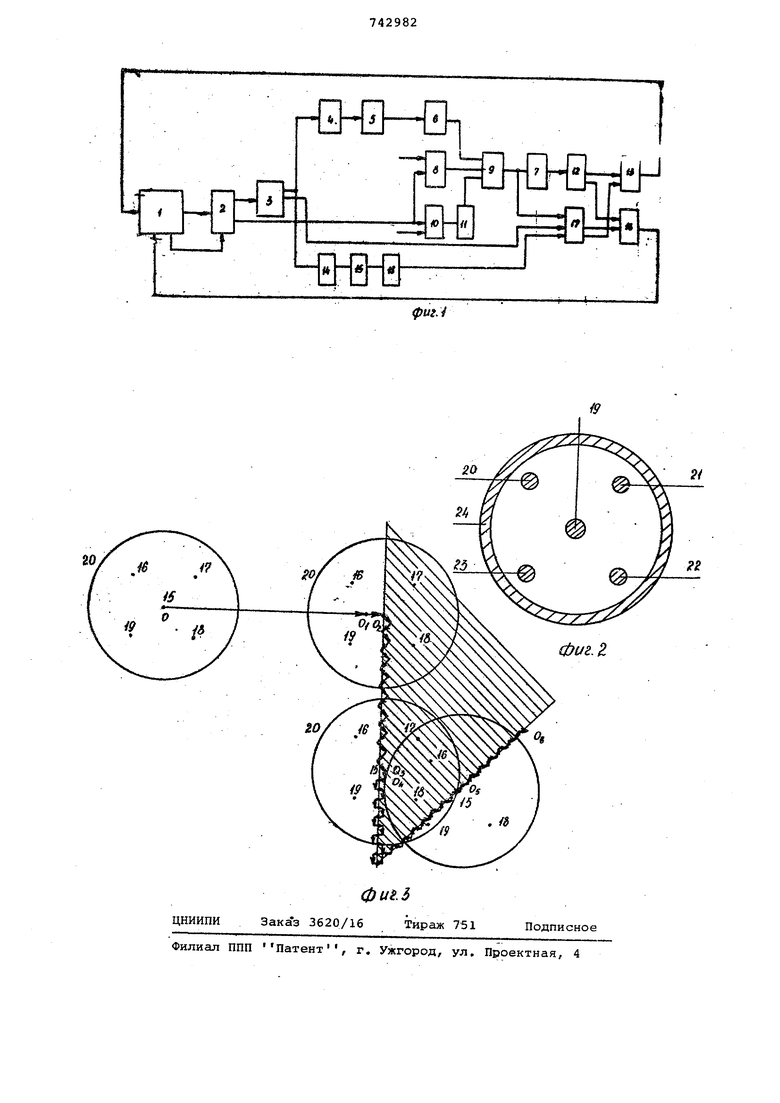
25 с выходом первого инвертора, а выход - с вторым входом второго блока управления и входом третьего инвертора, выход которого подключен к входу первого блока управления, треШй ВХОД второго блока управления фединен с выходом блока формирования сигналов На фиг,1 представлена блок-схема устройства; на фиг.2 - расположение считывающих элементов; на фиг.З т|заектория перемещения оптического центра считывающих элементов относительно границы кривой. Устройство содержит привод 1,счи .т авающие элементы 2, блок 3 формиро в|ания сигналов, первый дешифратор 4 п ервый шифратор 5, первый инвертор 61, третий инвертор 7, первый компар TJDp 8, элемент 9 , второй ком п|аратор 10, второй инвертор 11, пер в й-блок 12 управления, первый комм татор 13, второй/дешифратор 14, вфорой шифратор 15, регистр 16, вто р|эй блок 17 управления,, второй коммУтатор 18. i Устройство работает следующим образом. Координаты точек отслеживаемой кривой определяются путем алгебраического суммирования импульсов, в1Црабатываемых первым и вторым &покбми 12 и 17 управления для управле HJiH первым и вторым коммутаторами 13 .и 18, непосредственно .управляющими приводом 1, который переме1дае с гитываюадие элементы 2 по осям х х.и Y, Считьовающие элементы 2 вырабатывают сигналы, характеризующие распо лбжение соответствующих элементов относительно границы считываемой кр вой, Счи хывающие элементы 2 разделены на тЙ группы, Первая группа состоит из одного элемента 19, расположенного в центре, и является оптической осью, вторая группа состоит из четырех элементов 20, 21, 22 и 23, размещенных вокруг первой группы, и третья группа состоит из одного элемента 24, размещенного в виде кольца вокруг первой и второй групп. Сигналы, снимаемые с считывающего элемента 19, служат для управления перемещением головки в процессе отслеживания кривой по методу с совмещенным тактом поиска и обхода. Кроме того, эти сигналы служат для определения текущей координаты кривой. . Сигналы, снимаемые с элементов 20, 21, 22 и 23, служатдля управления перемещением считывающих элементов 2 по методу фиксированных направлений. Сигналы, снимаемые с считывающего элемента 24, предназначены для выбора метода слежения в зависимости от формы отслеживаемой кривой. Блок 3 формирования сигналов используется для формирования дискретных сигналов Освещен или Затемнен по сигналам, снимаемым с считывгиощих элементов 19, 20, 21, 22 и 23. В зависимости от их комбинаций, в первом блоке управления вырабатываются команды перемещения считывающих элементов 2 по методу фиксированных направлений, приведенные в таблице.
Первый дешифратор 4 и первый шифратор 5 преднаэначены-для выявления комбинаций состояний считывающих элементов, не используемых для слежения по методу фиксированных направлений .
В устройстве ввода при слежении за кривой используются два блока управления слежением. Первый блок 1.2 управления слежением по методу фиксированных направлений предназначен для отслеживания кривых, содержащих участки, радиус которых больше радиуса окружности элемента третьей группы, а второй блок 17 управления используется метод с совмещенным такто поиска и обхода при отслеживании кривых, содержащих участки с равным или меньшим радиусом кривизны окружности элемента 24, или при обходе ве шин углов.
Анализ отслеживаемой кривой в пол зрения считывающих элементов 2 с последующим выбором метода слежения осуществляется при помоци первого инвертора 6, третьего инвертора 7, первого и второго компараторов 8 и 10, элемента 9 И-НЕ и второго инвертора 11. Сигнал, снимаемый с элемента 24 третьей группы, сравнивается с двумя значениями пороговых напряжений и„ и , , где Ufv - нижнее значение порогового напряжения, а Ufig, - верхнее значение порогового напряжения. Разность пороговых напряжений определяет зону нечувствительности, а оптическая ось головки проходит примерно через середину зоны нечувствительности,Пороговые напряжения формируются известными способами, причем Ц„ выходах первого и второго компараторов 8 и 10 образуются сигналы логического нуля, если сигнал с элемента 24 больше или равен пороговому напряжению U,.
Если указанный сигнал меньше порогового напряжения Uf,2, но больше порогового напряжения и„,, то на выходе первого компаратора 8 вырабатывается сигнал логической единицы, а на выходе второго компаратора 10 - логического нуля.
Если этот сигнал меньше значения порогового напряжения tl, или равен ему, то на выходах обоих компараторов вырабатываются сигналы логической единицы.
Если указанный сигнал больше значения порогового напряжения или меньше значения порогового напряжения Uf,,, или имеется сигнал помехи,
то устройство работает по методу с совмещенным тактом поиска и обхода, используя второй блок 17 управления. Если этот сигнал меньше значения порогового напряжения 1 и больше значения порогового напряжения U, и.отсутствует сигнсш помехи, то
устройство работает по методу фиксированных направлений с использованием первого блока 12 управления. Таким образом, вырабатываются сигналы управления вторым блоком 17 управления при выполнении логического условия а в п, где а - сигнал с выхода первого компаратора 8;
в - сигнал с выхода второго компаратора 10;
0
п - сигнал с выхода первого шифратора 5. . Сигнал управления первым блоком 12 управления вырабатывается при выполнении логического условия:
5
Техническая реализация этих логических условий осуществляется инверторами б, 11 и 7 и логическим
0 элементом 9 И-НЕ,
Второй дешифратор 14, второй шифратор 15 и регистр 16 предназначены для устранения поискового движения считывающих элементов 2 при перехо5де от метода фиксированных направлений на метод с совмещенным тактом поиска и обхода.
На указанных функциональных элементах анализируются сигналы, харак0теризующие предыдущее направление перемещения считывающих элементов 2и текущее состояние элемента 19, По этим сигналам указанные элементы вырабатывают сигналы, соответствую5щие четырем направлениям перемещения считывающих элементов 2.
Предположим, считывающие элементы после поиска (вектор 00 ) пересекают границу кривой на участке, ра0диус которого больше радиуса окружности элемента 24, При этом, например, элементы 21 и 22, пересекая границу к)ивой, попадают на темное поле изображения, а элементы 20 и 23
5 и элемент 19 остаются на светлом поле (позиция 15), Сигнал, снимаемый с элемента 24, меньше значения порогового напряжения и„. При дальнейшем продвижении считывающих элементов 2
0 (вектор 0,02) сигнал, снимаемый с элемента 24, увеличивается и, наконец, становится больше порогового напряжения и„,. При этом оптическая ось (элемент 19 может пересечь грани5цу кривой и перейти на темное поле изображения (позиция 10), или же пересечь границу, оставаясь на светлом поле (позиция 15) ,. На фиг.З показано положение, соответствующее
0 позиции 15, Устройство переходит на отслеживание кривой по методу фиксированных направлений,
В процессе отслеживания кривой, . элемент 19 периодически изменяет
5 свое состояние, но никогда не удаляетСП от границы кривой на величину, большую одного шага. Расположение считывающих элементов относительно границы кривой позволяет получать сигналы, центр ру княие оптическую ось относительно гр нйцы кривой и сигналы, продвигающие считывающие элементы 2 вдоль кривой так, чтобы граница кривой находилась в зоне нечувствительности, Р4сположение элемента 19 внутри элементов 20, 21, 22 и 23 второй группы пс|эволяет путем разнесения элеменTdB второй группы относительно первс|й значительно повысить устойчивост устройства без потери заданной точнс|сти слежения. Одновременно с вырабс|ткой сигналов направление перемещ ния считывающих элементов 2 второй дфтфратор 14, второй шифратор 15 и .|регистр 16 вырабатывают сигналы « правления переходного движения считывающих элементов, которые задерживаются на один такт, .В случае наличия помехи или при подходе к участку кривой (участок ОжОд) с радиусом, меньшим радиуса ок)ружности элемента, 24, или,например к яершине угла, величина светового по;тока, поступающего на элемент 24, из.менится, а следовательно изменитс в ичина сигнала, снимаемого с указа{нного элемента. ЭТот сигнал стане меньше значения порогового напряжения Uni или больше порогового напря жения и.,, , в результате чего устрой ство переходит на метод слежения с совмещенным тактом поиска и обхода, Сл ежение по этому методу начнется по:сле обработки вторым блоком 17 . управления переходного движения После обхода угла на участке Og DC, опять используется слежение по методу фиксированных направлений Устройство позволяет повысить ск рость и точность ввода графической информации, содержащей кривые со сложными участками, в частности кон туров деталей швейных изделий. Формула изобретения Устройство для ввода графической информации, содержащее считывающие элементы соединенные с блоком формирования сигналов, первый и второй блоки управления, выходы которых соединены с соответствующими входами первого и второго коммутаторов, Влходы которых подключены к приводу, отличающееся тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные первый дешифратор,первый шифратор и первый инвертор,первый и второй компараторы,второй и третий инверторы, элемент И-НЕ,последовательно соединенные второй дешифратор,второй шифратор и регистр, выход которого под ключей к первому входу второго блока управления, вход второго дешифратора соединен с выходом блока формирования сигналов и входом первого дешифратора, выходы считывающих элементов подключены к одним входам первого и второго компараторов, другие входы которых соединены с источниками пороговых напряжений, выходы соответственно с первым входом элемента И-НЕ и входом второго инвертора выход которого подключен к второму входу элемента И-НЕ, третий вход которого соединен с выходом первого инвертора, а выход - с вторым входом второго блока управления и входом третьего инвертора, выход которого подключен к входу первого блока . управления, третий вход второго блока управления соединен с выходом блока формирования сигналов, Источники информации, принятые во внимание при экспертизе 1,Вычислительная техника в машиностроении. Научно-технический сборник, вып, IV (35) 1974, с.109115, 2,Патент Франции №2093021, кл, G 06 К 11/00, 1975,
