(St) БОЛЬШЕГРУЗНЫЕ ВЕСЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматические большегрузные весы | 1979 |
|
SU775627A1 |
| Способ управления электрогидравлической системой и устройство для его осуществления | 1989 |
|
SU1779806A1 |
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |
| Прибор для измерения поверхностного натяжения жидкостей | 1982 |
|
SU1075122A1 |
| Способ аттестации большегрузных образцовых гирь | 1978 |
|
SU711374A1 |
| Прецизионные большегрузные стационарные весы | 1978 |
|
SU748139A1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| Способ весового измерения установившегося расхода вещества и устройство для его осуществления | 1987 |
|
SU1506284A1 |
| Суммирующие весы | 1984 |
|
SU1268963A1 |
| Механизм гиреналожениябОльшЕгРузНыХ BECOB | 1978 |
|
SU794394A1 |
Изобретение относится к разделу техники измерения масс, а именно к весам для повышенных нагрузок.
Известны весы, содержащие грузоприемную площадку, систему промежуточных тяг и рычагов, указатель равновесия и отсчетный блок Cl J
Недостатками весов являются сложность конструкции и недостаточная точность и быстродействие из-за наличия промежуточных тяг и рычагов.
Наиболее близким к изобретению по технической сущности являются весы, содержащие грузоприемнук площадку, рычаги и опоры С2.is
Недостатками известных весов являются их недостаточная точность и быстродействие , так как они снабжены большим количеством передающих рычагов и тяг, промежуточным механизмом и меха- 20 нической системой отсчета.
Целью изобре.тения является повышение точности за счет уменьшения погрешности механической передачи.
Поставленная цель достигается тем, что весы снабжены равными маятниковыми рычагами с призмами, платформой и компенсатором, причем платформа жестко связана с грузоприемной площадкой и расположена на нижних призмах маятниковых рычагов, заклоненных к вертикальной плоскости под равными заданными углами, верхние призмы маятниковых рычагов расположены на опорах, смещенных в горизонтальной плоскоЬти на тот же заданный угол, а компенсатор через рычаг жестко связан с одним из маятниковых рычагов.
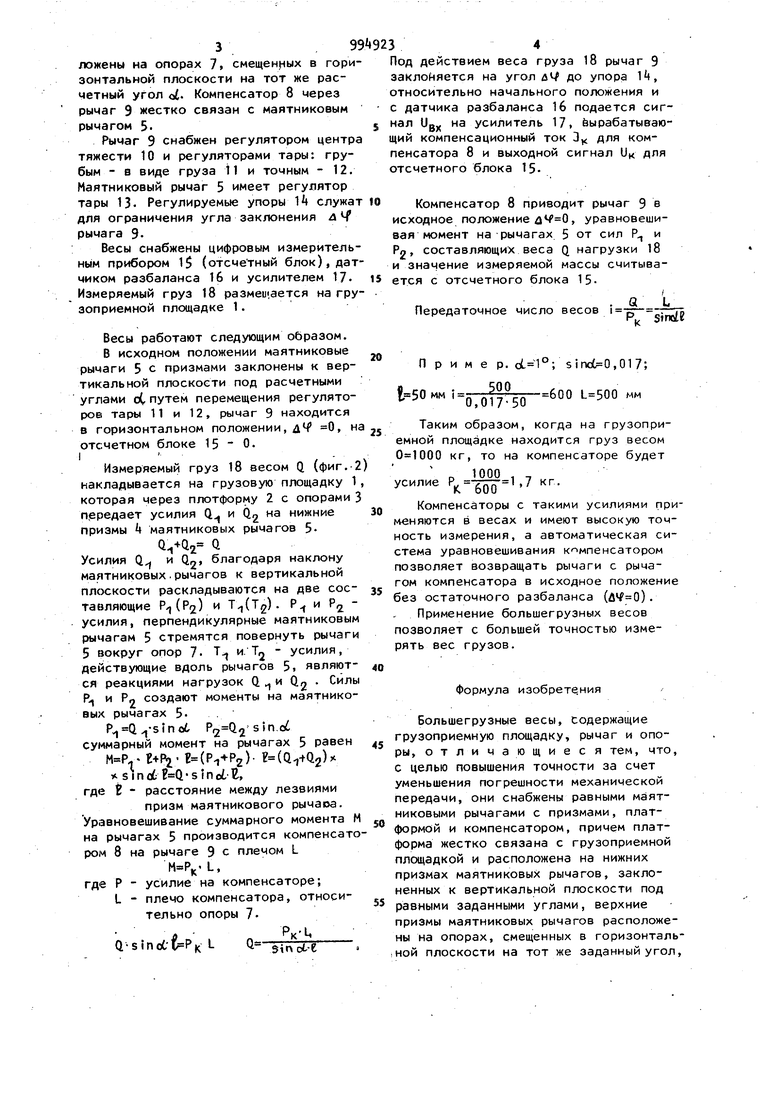
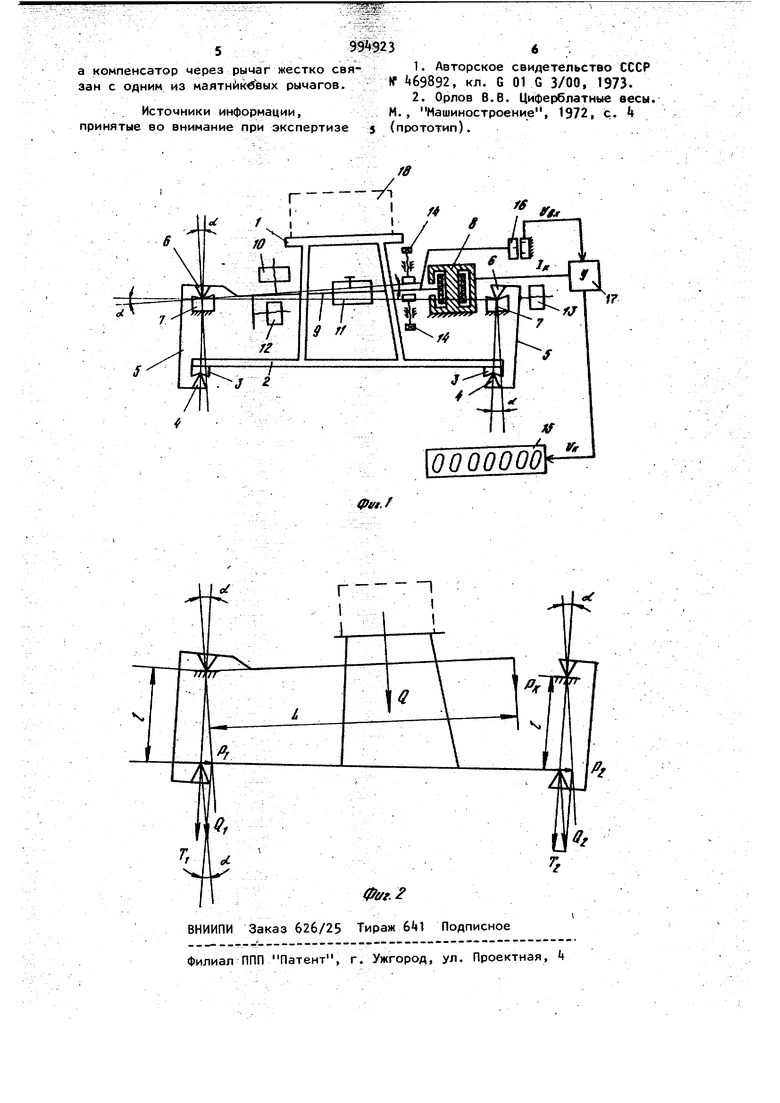
На фиг. 1 представлена схема весов; на фиг, 2 - схема расчета передаточного числа весов.
Весы содержат грузоприемную площадку 1 жестко связанна с платформой 2, расположенной подушками 3 на нижних призмах k маятниковых рычагов 5, заклоненных к вертикальной плоскости под расчетными углами cL- Верхние призмы 6 маятниковых рычагов 5 расположены на опорах 7 cмelдeн ыx в гори зонтальной плоскости на тот же расчетный угол о(. Компенсатор 8 через рычаг 9 жестко связан с маятниковым рычагом Рычаг 9 снабжен регулятором центр тяжести 10 и регуляторами тары: грубым - в виде груза 11 и точным - 12. Маятниковый рычаг 5 имеет регулятор тары 13. Регулируемые упоры Ц служа для ограничения угла заклонения л Ч рычага 9Весы снабжены цифровым измеритель ным прибором 15 (отсчетный блок), дат чиком разбаланса 16 и усилителем 17. Измеряемый груз 18 размещается на гру зоприемной площадке 1. Весы работают следующим образом. В исходном положении маятниковые рычаги 5 с призмами заклонены к вертикальной плоскости под расчетными углами оС путем перемещения регуляторов тары 11 и 12, рычаг 9 находится в горизонтальном положении, дЧ 0, н отсчетном блоке 15 0. Измеряемый груз 18 весом Q (фиг. 2 накладывается на грузовую площадку 1 которая через плотформу 2 с опорами передает усилия Q и Qg нижние призмы k маятниковых рычагов Усилия Q и Qo, благодаря наклону маятниковых.рычагов к вертикальной плоскости раскладываются на две соетавляющие Р.,(Р2) и (J. P-t 2 усилия, перпендикулярные маятниковым рычагам 5 стремятся повернуть рычаги 5 вокруг опор 7. Т и. Т - усилия, действующие вдоль рычагов 5, являются реакциями нагрузок Q и| и Qg Силы Р и РП создают моменты на маятниковых рычагах 5- . P(l -sinot P, sin.oi су1«(марный момент на рычагах 5 равен .- B(Pi+P2)- (Q-,-tQ2) It sino6B(isinot2, где В - расстояние между лезвиями призм маятникового рычаоа. Уравновешивание суммарного момента М на рычагах 5 производится компенсато ром 8 на рычаге 9 с плечом L , где Р - усилие на компенсаторе; L - плечо компенсатора, относительно опоры 7 л PK-U Q-sinoC-t PK L Q sinot-e Под действием веса груза 18 рычаг 9 заклойяется на угол й до упора , относительно начального положения и с датчика разбаланса 16 подается сигнал Ugj( на усилитель 17, ёырабатывающий компенсационный ток 3ц для компенсатора 8 и выходной сигнал UK для отсчетного блока 15Компенсатор 8 приводит рычаг 9 в исходное положение , уравновешивая момент на рычагах 5 от сил Р и Р2, составляющих веса Q нагрузки 18 и значение измеряемой массы считывается с отсчетного блока 15г,.аи Передаточное число весов ..-,. Пример. sinot 0,017; 600 мм 0,017-50 Таким образом, когда на грузоприемной площадке находится груз весом кг, то на компенсаторе будет 1000 усилие 1,7 кг. Компенсаторы с такими усилиями применяются в весах и имеют высокую точность измерения, а автоматическая система уравновешивания к- мпенсатором позволяет возвращать рычаги с рычагом компенсатора в исходное положение без остаточного разбаланса (). Применение большегрузных весов позволяет с большей точностью измерять вес грузов. Формула изобрете;ния Большегрузные весы, содержащие грузоприемную площадку, рычаг и опоры, отличающиес я тем, что, с целью повышения точности за счет уменьшения погрешности механической передачи, они снабжены равными маятниковыми рычагами с призмами, платформой и компенсатором, причем платформа жестко связана с грузоприемной площадкой и расположена на нижних призмах маятниковых рычагов, заклоненных к вертикальной плоскости под равными заданными углами, верхние призмы маятниковых рычагов расположены на опорах, смещенных в горизонтальной плоскости на тот же заданный угол.
5 6 ;
а компенсатор через рычаг жестко свя- 1- Авторское свидетельство СССР зан с одним из маятнйк вых рычагов. N б9892, кл. G 01 G 3/00, 1973.
Источники информации, М., Машиностроение, 1972, с. k принятые во внимание при экспертизе $ (прототип).
ооооооо г
