Изобретение откосится к космической технике, а имение к солнечным датчикам ориентации для космических аппаратов.
Известен полночный датчик, содержащий непрозрачную диафрагму с круглым отверстием, за которым расположена линейка чувствительности элементов фоточувствительного прибора с зарядовой связью. Такой датчик может иметь либо хорошую точность и малое поле зрения, либо наоборот, - сравнительно большое поле зрения, но низкую точность.
Известен также солнечный датчик, принятый за прототип, содержащий непрозрачную сферическую диафрагму с круглыми отверстиями, которые сопряжены посредством световолоконных элементов с чувст- вительными элементами приемника излучения.
Недостатками указанного датчика явля- ки ограниченное поле зрения (120°) и при ifcHc -i ie подвижных элементов, что приводит к снижению его надежности. Это связано с тем, что непрозрачная диафрагма, поверхность которой имеет сферическую форму, устанвс.лена с возможностью вращения в подшипниках, что в акосмических условиях может привести к выходу прибора из г/фоя.
Целью изобретения является увеличение угла поля зрения датчика и повышение надежности устройства в работе.
Указанная цель достигается тем, что в солнечном датчике, содержащем непрозрачную сферическую диафрагму с круглыми отверстиями, оптически сопряженными по- eptMcmoM световолоконных элеметов с элементами фоточузствительной линейки фотоприемного блока, вход которого соеди- нкн с первым выходом блока управления, а выход - с входом усилителя блока обработ- «.и сигнала, диафрагма выполнена в виде сферического куба, на котором квазиравномерно расположены дифракционные отверстия, причем плоскости этих отверстий еовмешены с плоскостью, касательной к по- аерхности куба, а центры этих отверстий в пределах каждого сферического квадрата, являющегося гранью сферического куба, ле- ат в гонках пересечения меридианов, про- ходйЩ лх через центры смежных симметричных квадратов и через равноотстоящие друг от друга точки, расположенные на центральных меридианах данного сферического квадрата, за каждым отверстием расположена светопоглощающая полость, ограниченная со стороны центра сферического куба параболической рассеивающей поверхностью, а с другой стороны - плоской рассеивающей поверхностью, параллельной плоскости отверстия, при этом
ось параболоида перпендикулярна поверхности диафрагмы, а фокус параболоида совмещен с центром отверстия, в вершине параболоида расположен торец свето- волокна, а другой торец световолокна соединен с элементом фотоприемника так, что пер-вый элемент сопряжен с отверстием, расположенным на северном полюсе сферического куба, за который принимается один из центров сферического квадрата,
каждая новая последующая последовательность отверстий,соединяемая с очередной серией элементов фотоприемного блока, опоясывает предыдущую, каждый раз начинаясь на нулевом мередиане, за который
принимается меридиан, проходящий через северный и южный полюса, и центр одного из смежных квадратов, фотоприемный блок выполнен на приборе с зарядовой связью, блок обработки сигнала снабжен аналогового-цифровым преобразователем, тремя запоминающими устройствами, задатчиком констант, двумя блоками сравнения, тремя блоками декодирования, блоком вычисления расстояний между двумя точками, блоком кодирования блоком вычисления координат Солнца, при этом аналого-цифровой преобразователь входом подключен к выходу усилителя блока обработки сигнала, а выходом соединен с последовательно
связанными первым запоминающим устройством, первым блоком сравнения, вторым запоминающим устройством, первым блоком декодирования, третьим запоминающим устройством, блоком вычисления расстойкий между двумя точками, вторым блоком сравнения и блоком кодирования, выходом подключенного ко второму входу первого запоминающего устройства, второй выход первого блока сравнения соединен со вторым входом блока вычисления координат Солнца, третий вход которого связан с выходом первого запоминающего
устройства, соединенного также со вторым входом блока вычисления расстояний между точками, а четвертый вход - с выходом третьего запоминающего устройства, выход первого запоминающего устройства соеди- нен также с четвертым входом блока вычисления координат Солнца, первый вход которого подключен к выходу второго блока декодирования, при этом выход задатчика констант соединен со вторыми входами первого, второго и третьего блоков декодирования, первые входы второго и третьего блоков декодирования соединены со вторым выходом блока управления, выход третьего блока декодирования подключен к третьему входу блока вычисления расстояний между точками, а второй выход второго запоминающего устройства соединен со вторым входом первого блока сравнения, диаметр отверстия в диафрагме выбирается в соответствии с выражением
«Ид
2,4 -Af
где do - диаметр отверстия в диафрагме;
dB - диаметр волоконного элемента;
f - фокус параболической поверхности;
А - эффективная длина волны излучения;
Ед - предельно допустимая освещенность для фотоприемника;
Ёо освещенность, создаваемая Солнцем.
Кроме того, блок управления выполнен в виде генератора импульсов, счетчика, блока сравнения и задатчика числа отверстий в диафрагме, при этом выход генератора импульсов соединен со счетчиком, выход кото- рого подключен к первому входу блока сравнения и является вторым выходом блока управления, ко второму входу которого подключен выход задатчика числа отверстий, выход блока сравнения соединен с входом генератора импульсов, выход которого является первым выходом блока управления.
Увеличение поля зрения датчика достигается за счет того, что приемником солнечного света служит не одно отверстие, как в прототипе, а множество (несколько сотен), и при этом расположенных квазиравномерно на шаровой поверхности.
Надежность датчика улучшена за счет того, что, в отличие от прототипа, в нем отсутствуют движущиеся части, которые чаще всего отказывают в космических условиях, а также за счет того, что в случае выхода из строя одного или нескольких каналов дат
5 0 5 0
5
0
э
5
0
5
чик дает правильный результат при незначительном уменьшении точности.
Сравнение предложенного технического решения с прототипом позволяет сделать вывод о соответствии этого решения критерию новизна. Сравнение с другими устройствами позволяет сделать вывод о соответствии данного технического решения критерию существенные отличия.
Изобретение поясняется чретежами,
На фиг.1 показана общая блок-схема предложенного устройства; на фиг.2 - конструкция оптической части и фотоприемник; на фиг.З - схема, поясняющая принцип нумерации отверстий на диафрагме; йа фиг.4 - пояснение принципа декодирования порядкового номера элемента на ПЗС-ли- нейка; на фиг.5 - ход лучей в оптической системе устройства, ослабляющего солнечное излучение.
В состав солнечного датчика входят следующие блоки:
1-оптическая система;
2-линейка элементов фоточувствительного прибора с зарядовой связью;
3-усилитель;
4-аналого-цифровой преобразователь;
5-первое запоминающее устройство (ЗУ);
6-первый блок сравнения;
7-второе запоминающее устройство;
8-первый блок декодирования;
9-третье ЗУ;
10-блок вычисления расстояний между двумя точками на поверхности сферического куба;
11-второй блок сравнения;
12-блок кодирования;
13-второй блок декодирования;
14-блок вычисления точного значения координат Солнца;
15-задатчик констант,
16-третий блок декодирования;
17-блок управления;
18-генератор импульсов;
19:счетчик;
20-третий блок сравнения;
21-задатчик числа отверстий;
22-отверстие диафрагмы;
23-диафрагма;
24-рассеивающая параболическая поверхность;
27-полый сферический куб;
26-световолоконный элемент;
27-полая ножка;
28-основание;
29-линейка элеметов прибора с зарядовой связью (ПЗС);
30-рассеивающая плоскость.
Солнечный датчик (фиг.1) состоит из оптической системы 1, сопряженной с ПЗС-ли- нейкой 2, снабженный блоком управления 17, усилителем 3, аналого-цифровым преобразователем 4, первым ЗУ 5, первым блоком сравнения 6, вторым ЗУ 7, первым блоком декодирования 8, третьим ЗУ 9, блоком вычисления расстояний между двумя точками на поверхности сферического куба 10, вторым блоком сравнения 11, блоком кодирования 12, при этом второй блок декодирования 13 соединен выходом с входом блока 14 вычисления точных координат Солнца, а входами - с выходом задатчика 15 константы, подключенного ко второму входу первого блока 8 декодирования и второму входу третьего блока 16 декодирования. Блок 14 вычисления связан также с выходом первого блока сравнения 6, с выходом первого ЗУБ и с выходом третьего ЗУ 9.
Фотометрическая часть датчика устроена следующим образом (фиг.2). Она состоит из полого шара 25, полой ножки 27 и полого основания 28. Ножка 27 служит для крепления куба 25 к основанию 28. Внутри нее проходят световые волокна 26. Основание
28присоединяется к космическому аппара- ЛФ и служит контейнером для ПЗС-линейки
29и электронного блока, выполняющего об- работку сигнала.
Тело датчика 25 представляет собой полый шар. однако для удобства описания расположения отверстий будем считать его поверхность сферическим кубом с гранями, являющимися сферическими квадратами. Это же поверхность представляет собой непрозрачную диафрагму с выполненными на ней отверстиями 22. За каждым из отверстий расположена поглощающая полость. С внешней стороны она ограничена рассеивающей свет плоскостью 30, которая параллельна плоскости, касающейся поверхности шара в точке, совпадающей с центром отверстия:. С другой стороны полость ограни- мена рассеивающей свет параболической поверхностью 24, ось которой совпадает с осью отверстия 22 диафрагмы 23, а фокус - с центром этого отверстия. В вершине параболической поверхности заподлицо с этой поверхностью расположен торец светово- покна 26. Ось световолокна в этой точке совпадает с осью параболической поверхности.
Световые волокна 26 проходят внутри полой сферы 25, затем через полую ножку 27 попадают в основание 28, где они оптически сочленяются (например, наклеиваются прозрачным клеем) с элементами ПЗС-линейки 29 в определенном порядке С
каждым элементом линейки соединяется одно волокно. ПЭС-линейка 28 соединена с электронным устройством (фиг.1).
Шаровая поверхность 25 разбита на
квазиравноотстоящие узлы, в которых помещены центры калиброванных отверстий 22 следующим образом,
В шар данного диаметра вписываем куб. Через ребра этого куба и через центр
шара проводим плоскости, которые на поверхности шара ограничивают сферичекие квадраты, а сама поверхность шара превращается в сферический куб.
В центре одного из сферических квадратов выбираем полюс системы координат. Назовем его северным, Центр противолежащего квадрата назовем южным полюсом. Проведены экватор через центры квадратов, расположенных между северным и южным полюсами (см. фиг.З).
С помощью меридианов в экваторе каждый из квадратов разбиваем на четыре равные части. Длина каждой хорды внутри квадрата окажется равной nil. На каждой
такой хорде равномерно разместим (2 йЯ-1) точку, включая точки на границах квадрата и его центре. Здесь со -любое целое число, выбираемое из инженерных соображений, а также необходимой точности определения
координат Солнца.
Через эти точки и через центры двух смежных квадратов проводим большие дуги. Точки пересечения этих дуг между собой плюс точки на границах квадратов и образуют систему узлов, в которых помещены центры отверстий.
Нумеруем эти узлы индексами I и k следующим образом, Выберем один из мерида- нов, проходящий через центры квадратов,
за нулевой и северный и южный полюса на нулевом. Точке, в которой он пересекается с экватором, припишем координаты 1 0 и (см. фиг.З).
В сторону северного полюса припишем
узлам координаты I от 1 до 4 со. В сторону южного полюса - от -1 до -4 со.
Вдоль экватора припишем узлам координаты k от 0 до (2 йЯ-1) при обходе экватора по часовой стрелке, если смотреть со стороны северного полюса, и координаты от -1 до -4 (У в обратную сторону.
Соединение концов световодов 26 с элементами ПЗС-линейки29 можетбыть вы- полнено так. На 1-й элемент наклеивается световод, идущий от северного полюса. На следующие элементов следует наклеить световоды, идущие от отверстий, расположенных вокруг северного полюса,начиная с
того, который лежит на нулевом меридиане, И так далее, строчка за строчкой, до световода, соединенного с последним отверстием, расположенным на границе южного квадрата.
Пример 1. Оценим, сколько всего окажется отверстий. Это число N равно сумме трех величин; числа вершин сферического куба, числа узлов на сторонах сферических квадратов и числа узлов, лежащих внутри сферических квадратов. Число вершин сферического куба . На каждой стороне сферического квадрата расположено (2 аН) узел, а всего сторон 12. Тогда общее число узлов, расположенных на сторонах квадратов (без их концов) (2ft)-1). Внутри каждого диаметра (без его границ) расположено (2 ш -1) узлов.
Всего узлов внутри каждого сферического квадрата (2ш -1)2. Исключим из рассмотрения квадрат, расположенный вблизи ножки. Тогда всего квадратов окажется 5, а общее число расположенных внутри них узлов N3 5 (2ft)-1)2.
Итак, общее число отверстий N равно:
N Ni + N2 + N3 8 + 12 (2й)-1) + + 5(2-1)2 8+ (2 )(10 он-7).
Если использовать типовую ПЗС-линей- ку с 1024 элементами, то максимальное ft) может быть равно 6. Тогда N 745.
На фиг.4 пояснена структра таблицы, предназначенной для декодирования порядка номера отверстия в пару сферических координат А и р в инструментальной системе датчика. Значения А и (р в примере вычислены для ш- 2.
На фиг.5 пояснен ход лучей в оптической системе устройства, предназначенного для ослабления потока солнечного излучения. Стрелками показан ход лучей зеркальной составляющей отраженного излучения.
Принцип работы датчика основан на следующем.
Свет от Солнца попадает в часть отверстий, расположенных на освещенной по- лусфере. В грубом приближении освещенность каждого из отверстий пропорциональна косинусу угла падения лучей. Тогда координаты той точки на шаровой поверхности, где освещенность, описываемая косинусом, достигает максимума, и являются сферическими координатами Солнца в системе координат, связанной с датчиком.
Датчик работает следующим образом.
Солнечное излучение, попавшее на отверстие, дифрагирует на нем, и часть световой энергии попадает внутрь светового волокна 26, проходит по этому волокну и освещает элемент ПЗС-линейки 29. Линейка преобразует световую энергию в электриче- 5 ский сигнал, который считывается, запоминается и обрабатывается в электронном устройстве (см. фиг.1). Результатом этой обработки являются координаты Солнца в инструментальной системе координат. Тем 0 самым датчик решает свою задачу.
Другая часть света (см. фиг.5), на попавшая на световолокно 26, равномерно поглощается поверхностями поглощающей области. Сначала поглощение, рассеяние и
5 отражение происходит на параболической поверхности 24, затем зеркально отраженная компонента света преобразуется параболической поверхностью в параллельный пучок и попадает на плоскую поверхность
0 30, на которой световая энергия вновь поглощается, рассеивается и отражается. Отраженная часть света параллельным пучком на параболическую поверхность 24, на которой вновь происходит поглоще5 ние, рассеяние и отражение. Отраженная составляющая собирается вблизи отверстия 22, через которое оставшаяся часть световой энергии выходит наружу.
Поглощающая область решает три за0 дачи. Во-первых, освещенность, создаваемая солнцем, примерно в 104 раз больше, чем максимально допустимая освещенность на ПЗС-линейке. Поэтому необходимо рассеять 99,99% солнечной энергии. Во-вто5 рых, необходимо не просто рассеять солнечную энергию, а в большом объеме, иначе возникнут термические деформации датчика, которые снизят его точность. В- третьих, поглощающая область играет роль
0. фотометрического шара, выравнивая сложные явления, которые возникают при дифракции, рассеянии и поглощении света.
Освещенность Е0, создаваемая Солнцем, и предельно допустимая для ПЗС-ли5 нейки освещенность Ед связаны с диаметром отверстия ,диаметром волокна du, фокусом параболической поверхности Г и эффективной длиной волны Я следующим образом:
0
н & 24 -Af...
do .(1)
I toUB
Если это условие нарушено, то либо ПЗС-ли- нейка выйдет на режим блуминга, либо упа- 5 дет отношение сигнал/шума. В обоих случаях произойдет потеря точности,
Выражение (1) получено из следующих соображений. Требования к ослаблению света Солнца в К раз, где
к - ЕО/ЕД,
приравнивается к ослаблению, которое дает дифракция на отверстии:
У(2.4- И1 5
Ь о
N / /ч 12.
б iT-db
где Si - площадь торца световолокна;
$2- площадь, зажимаемая на параболической поверхности центральным дифракционным пятном. Величины f и de выбираются из инженерных соображений.
Пример 2. У известных ПЗС-линеек величина Ед близка к 1 лк. Солнечная освещенность Ео имеет порядок 10 лк. Примем эффективную длину волны солнечного излучения А 0,5 мкм, диаметр волокна de 10 мкм, фокусное расстояние f 7 мм. Тогда по формуле (1) получим do 10 мкм.
Оптический сигнал поступает на элементы ПЗС-линейки 2 и преобразуется в них в электрический сигнал. Управляющее устройство 17 организует считывания этого сигнала путем засыпки тактовых импульсов считывания. Интервалы времени между считываниями образует время накопления сигнала. Считывающие импульсы вырабатываются генератором 18. Одновременно эти импульсы засыпаются в счетчик 19, содержимое этого счетчика сравнивается с помощью блока 20 сравнения с содержанием задатчика 21, в котором хранится число nmakc - общее число отверстий. В случае совпадения этих двух значений процесс считывания заканчивается.
Устройство управления 17, обведенное на фиг.1 штриховой линией, используется многократно при дальнейшей обработке сигнала. В этих случаях рядом с блоком (или их группой) условно указана стрелка А.
Процесс считывания сигнала сопровож- дается его усилением в усилителе 3, преобрзованию аналогового сигнала в цифровой в ПЦП 4 и запоминанию сигналов в запоминающем устройстве 5.
Далее ищем максимальный сигнал 1М и его порядковый номер М следующим обра- зом.
В запоминающем устройстве ЗУ 5 сначала хранится нуль в качестве сигнала IM и нуль в качестве М. Значение сигнала 1М (текущее) сравнивается с очередным значени- ем In (n-1,..., Птакс) в первом устройстве 6 сравнения. В случае выполнения условия м In во втором запоминающем устройстве 7 запоминаются новые значения: lm In, М - п. После перебора всех значений сигналов в
ЗУ 7 окажется максимальный сигнал IM и его порядковый номер М.
Величина М поступает в первое устройство декодирования 8, куда поступает и таблица задатчиков констант 15. В итоге работы этой части устройства М превращается в пару значений (ро , АО), списывающих начальное (нулевое) приближение для координат Солнца.
Величины ( , АО) и 1м запоминаются третьим запоминающим устройством 9.
Следующий этап - определение расстояний г от точки с максимальным сигналом с координатами (ро , АО) до текущей точки с координатами (р, А). Эта величина определяется вычислителем 10 по формуле:
COS Г Sin ро Sin р +
+ cospb cos (До -А) (2)
Координаты (р,Х) для центра каждого отверстия вычисляются следующим образом: содержимое счетчика 19 при каждом такте генератора 18 засылается в третье устройство 16 декодирования. В это же устройство засылается содержимое задатчика 15 констант, в котором для каждого отверстия с порядковым номером и хранятся заранее вычисленные координаты центров отверстий ($р,А) (см. фиг.4). Эти величины (р,А) подставляются в ф-лу (2), по которой блок 10 вычисления расстояний определяет расстояние. Все величины поступают во второе устройство сравения УС 11, где они сравниваются с величиной 90°. При г 90° поверхность не освещена Солнцем, и эти точки в дальнейшем не должны участвовать в обработке. В устройстве кодирования УК 12 сигналы, для которых г 90°, помечаются, например обнуляются, и не входят в дальнейшую обработку.
Совокупность сигналов, помеченных в блоке кодирования 12, запоминаются в первом запоминающем устройстве 5, из которого они будут многократно считываться устройством 14 вычисления точных координат Солнца. При каждом считывании сигналов из ЗУ 5 во второе устройство 13 декодирования поступает содержимое счетчика 19, которое по таблице, хранящейся в задатчике 15 контакт, превращается в пару сферических координат (р, А).
Вычислительное устройство 14 определяет точные значения координат Солнца (ро , АО) методом начальных квадратов путем последовательных приближений. Запи шем уравнение:
1 1мСОЗГ- F(r), П 1 Птакс, (3)
где 1м - максимальный сигнал;
91,
31
м
31 31
acfa ai
АЛ
г - расстояние на сфере по дуге большого круга между подсолнечной точкой с точными значениями иАоИ текущей точкой. Функция F(r) является эмпирической поправкой, учитывающей отклонение зависимости l(n) от закона косинусов. Эта функция определяется по наземным испытаниям прибора (калибровке). Общий вид ее заранее не известен, в общем случае это табличная функция. Неизвестных параметра три: м, ро и
АО,
где ро и Ар - точные значения координат Солнца. В качестве нулевого приближения для 1М берем максимальный сигнал и коор- динаты (оДо ), занесенные с ЗУ 9.
Нормальные уравнения, позволяющие определить поправки к независимым Д1М, и АДо , в данном случае имеют
вид: 91/Зт 2
Z&I- iI TfWsi
ai эг
H%,
aiw З А, ai
(-v
UXI
где производные по параметрам ются как:
Лг
--.coS««-FM, 01м
31
7o IMFW co5 tf-5i 4 oCo5CfQ
91 IttF(r1coscf0cosif бт(М0);
а б I вычисляется по формуле:
5 I I - 1М cos r F (г)
(6)
Суммирование выполняется только по тем узлам, для которых выполнено условие г 90°.
Поскольку основное уравнение (3) является трансцендентным, поправки получаются методом итераций. В качестве условия окончания итераций можно принять уело- вне
/А 1м/
а
(7)
0
0
5
0
5
0
5
0
где а эмпирически определяемая ошибка одного измерения величины (п). После окончания итераций получаем точное значение р0 и АО в виде:
ро РО + Дро ; АО Ао + АДо ,
что и является решением поставленной задачи.
В данном датчике в семь раз увеличено поле зрения и одновременно в четыре раза улучшена точность по сравнению с прототипом. Важнейшим преимуществом предлагаемого датчика является то, что он двухкоординатный (в прототипе определяется одна координата). Это ведет к расширению возможностей данного датчика и также приводит к повышению точности. Формула изобретения 1. Солнечный датчик, содержащий непрозрачную диафрагму с круглыми отвер- стями, оптически сопряженными посредством световолоконных элементов с элементами фоточувствительной линейки фотоприемного блока, вход которого соединен с первым выходом блока управления, а выход - с входом усилителя блока обрабоки сигнала, о - тличаюа1ийся тем, что, с целью увеличения угла поля зрения и повышения надежности работы датчика, в нем диафрагма выполнена в виде сферического куба, на котором квазиравномерно расположены дифракционные отверстия, причем плоскости этих отверстий совмещены с плоскостью, касательной к поверхности куба, а центры этих отверстий в пределах каждого сферического квадрата, являющегося гранью сферического куба, лежат в точках пересечения меридианов, проходящих через центры смежных сим- метричных квадратов и через равноотстоящие одна от другой точки, расположенные на центральных меридианах данного сферического квадрата, за каждым отверстием расположена светопоглощающая полость, ограниченная со стороны центра сферического куба параболической рассеивающей поверхностью, а с другой стороны - плоской рассеивающей поверхностью, параллельной плоскости отверстия, при этом ось параболоида перпендикулярна поверхности диафрагмы, а фокус параболоида совмещен с центром отверстия, в вершине параболоида расположен торец световолок- на, а другой торец световолокна соединен с элементом фотоприемника так, что первый элемент сопряжен с отверстием, расположенным на северном полюсе сферического куба, за который принимается один из центров сферического квадрата, каждая новая последующая последовательность отверстий, соединяемая с очередной серией элементов фотоприемного блока, опоясывает предыдущую, каждый раз начинаясь на нулевом меридиане, за который принимается меридиан, проходящий через северный полюс и центр одного из смежных квадратов, фотоприемный блок выполнен на приборе с зарядовой связью, блок обработки сигнала снабжен аналого-цифровым преобразователем, тремя запоминающими устройствами, задатчиком констант, двумя блоками сравнения, тремя блоками декодирования, блоком вычисления расстояний между двумя точками, блоком кодирования и блоком вычисления координат Солнца, при этом аналого-цифровой преобразователь входом подключен к выходу усилителя блока обработки сигнала, а выходом соединен с последовательно связанным первым запоминающим устройством, первым блоком сравнения, вторым запоминающим устройством, первым блоком декодирования, третьим запоминающим устройством, блоком вычисления расстояний между двумя точками, вторым блоком сравнения и блоком кодирования, выходом подключенным к второму входу первого запоминающего устройства, второй выход первого блока сравнения соединен с вторым входом блока вычисления координат Солнца, третий вход которого связан с выходом первого запоминающего устройства, соединенного также с вторым входом блока вычисления расстояний между точками, а четвертый вход - с выходом третьего запоминающего устройства, выход первого запоминающего устройства соединен также с четвертым входом блока вычисления координат Солнца, первый вход
которого подключен к выходу второго блока декодирования, при этом выход задатчика констант соединен с вторыми входами первого, второго и третьего блоков декодирования, первые входы второго и третьего блоков декодирования соединены с вторым выходом блока управления, выход третьего блока декодирования подключен к третьему входу блока вычисления расстояний между точками, а второй выход второго запоминающего устройства соединен с вторым входом первого блока сравнения, диаметр отверстия в диафрагме выбирается в соответствии с выражением
5
где dc диаметр отверстия в диафрагме;
do - диаметр волоконного элемента;
Г- фокус параболической поверхности; Л-длина волны излучения; Ед - предельно допустимая освещенность для фотоприемника;
ЕО - освещенность, создаваемая Солнцем.
2. Датчик по п.1,отличающийся тем, что блок управления выполнен в виде генератора импульсов, счетчика, блока
сравнения и задатчика числа отверстий диафрагмы, при этом выход генератора импульсов соединен со счетчиком, выходом подключенным к первому входу блока сравнения, и является вторым выходом блока
управления, к второму входу которого подключен выход задатчика числа отверстий, выход блока сравнения соединен с входом генератора импульсов, выход которого является первым выходом блока управления,
с. д, 0м-1
л
Cf&efHt/ U .
i /
тц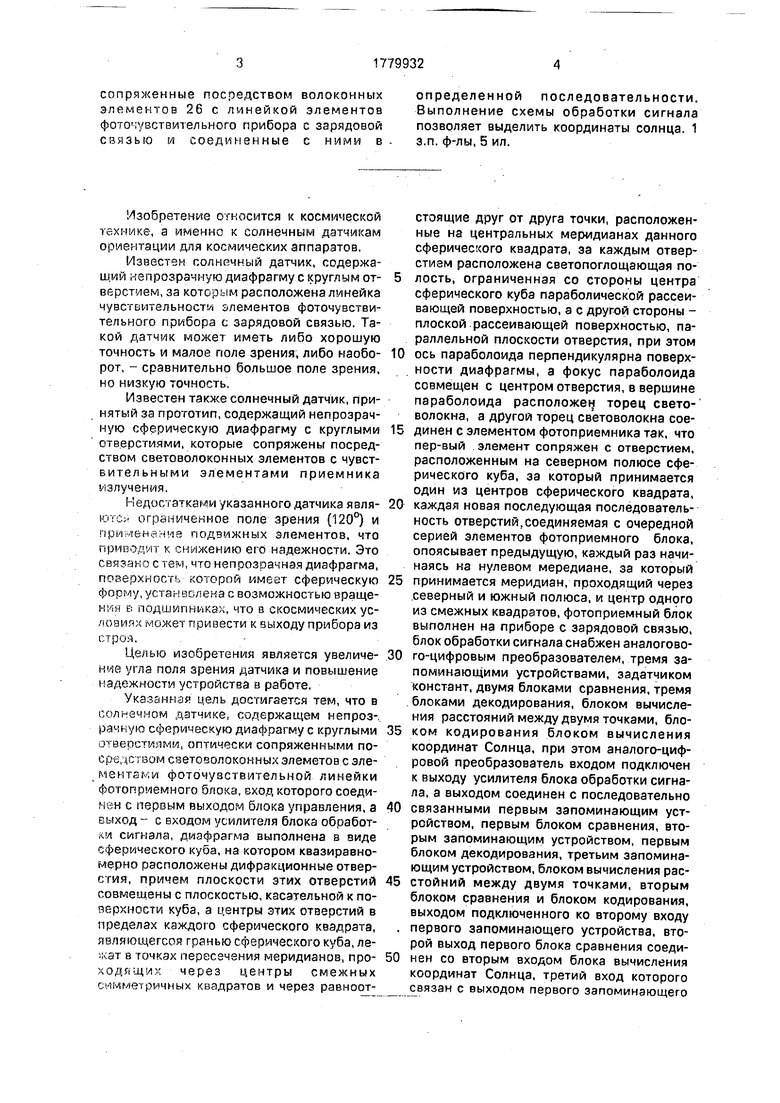




| название | год | авторы | номер документа |
|---|---|---|---|
| Солнечный датчик | 1990 |
|
SU1779931A1 |
| Система для измерения солнечных спектров атмосферы | 2022 |
|
RU2789993C1 |
| УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ ЦЕНТРА ИЗОБРАЖЕНИЯ ОБЪЕКТА ИЗЛУЧЕНИЯ | 1995 |
|
RU2104493C1 |
| ОПТИЧЕСКИЙ СОЛНЕЧНЫЙ ДАТЧИК | 2013 |
|
RU2517979C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАТФОРМОЙ КОНЦЕНТРАТОРНЫХ СОЛНЕЧНЫХ МОДУЛЕЙ | 2015 |
|
RU2611571C1 |
| Оптическое фотоэлектрическое устройство | 1990 |
|
SU1753444A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2002 |
|
RU2223515C1 |
| СИСТЕМА ПОСАДКИ САМОЛЕТОВ | 1994 |
|
RU2086471C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СТРЕЛКОВЫЙ ТРЕНАЖЕР КОЛЛЕКТИВНОГО БОЯ | 2002 |
|
RU2211433C1 |

Изобретение относится к космической технике, а именно к солнечным датчикам ориентации для космических аппаратов. Целью изобретения является увеличение поля зрения датчика и повышение надежности его в работе. Поставленная цель достигается тем, что в солнечном датчике диафрагма 23 выполнена в виде сферического куга, на котором квазиравномернорасположены дифракционные отверстия 22, оптически
Фи.г. 3 неридиа
Фиг. 4
/4
Фиг.5
гв
| Flamenbaum S | |||
| Austett P | |||
| Multipurpose sun sensor using CCD detector | |||
| Automat- lecontrol In space, 1982 | |||
| Ed | |||
| Van Woercom | |||
| Pergamon Press, 1982, p | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU273A1 |
| КАТАЛИЗАТОР ДЛЯ ДЕГИДРИРОВАНИЯ ОЛЕФИНОВЫХ УГЛЕВОДОРОДОВ | 1997 |
|
RU2116830C1 |
