Изобретение относится к сельскому хозяйству, к сельскохозяйственному машиностроению, в частности к устройствам для подгона животных, и может найти применение для организации планового перемещения животных по скотопрогонам как на крупных, так и на малых животноводческих фермах.
Целью изобретения является повышение эффективности способа и устройства путем уменьшения числа стрессовых ситуаций в процессе подгона животных.
Достигается это тем, что способ управления подгоном животных предусматривает перемещение взаимодействующей с животными штанги вслед за животными и воздействие на животных электроразрядами при контактировании указанной штанги с животными, разрядом воздействуют на животных только в случае отклонения штанги от вертикали более чем на определенную, заранее заданную величину, например на 15°. Кроме того, при отклонении штанги от вертикали на указанную величину прекращают перемещение штанги и возобновляют
О
его только после возвращения штанги ь вертикальное положение, Если штанга после первого воздействия электроразрядом не вернется в вертикальное положение через 3 ... 5 с, повторяют воздействие электроразрядом, и в случае, если и после второго разряда штанга через 3 ... 5 с не возвращается в вертикальное положение, воздействие разрядами прекращают и оповещают оператора.
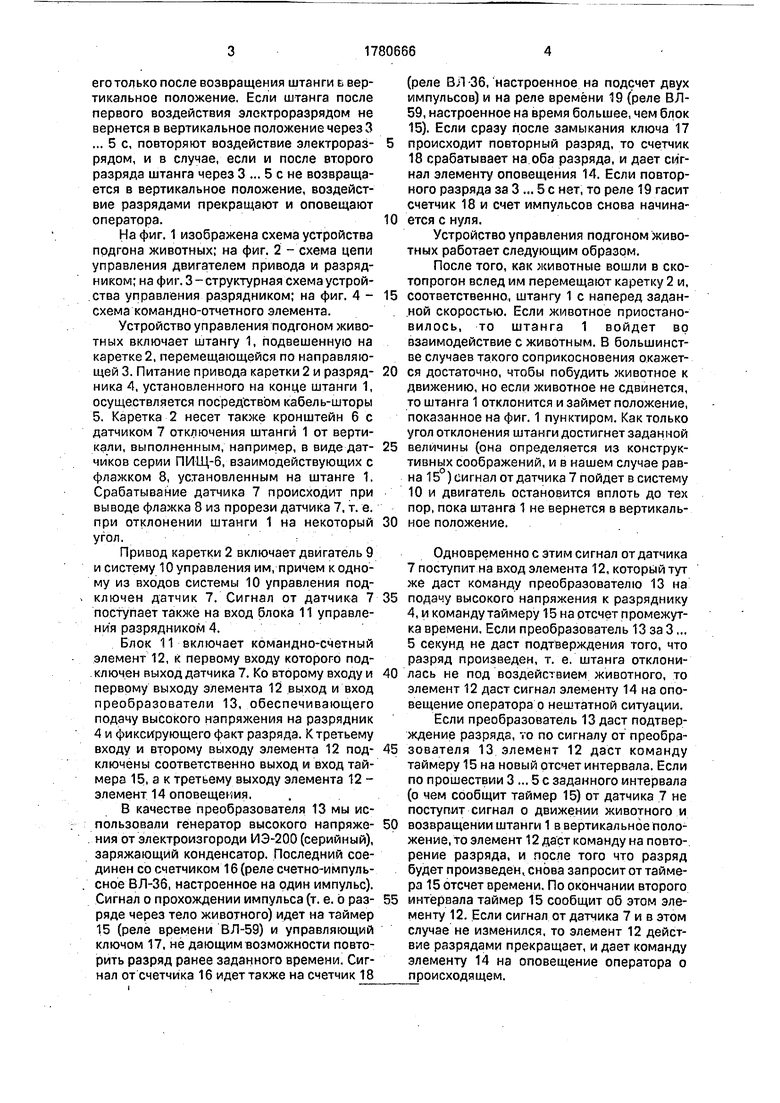
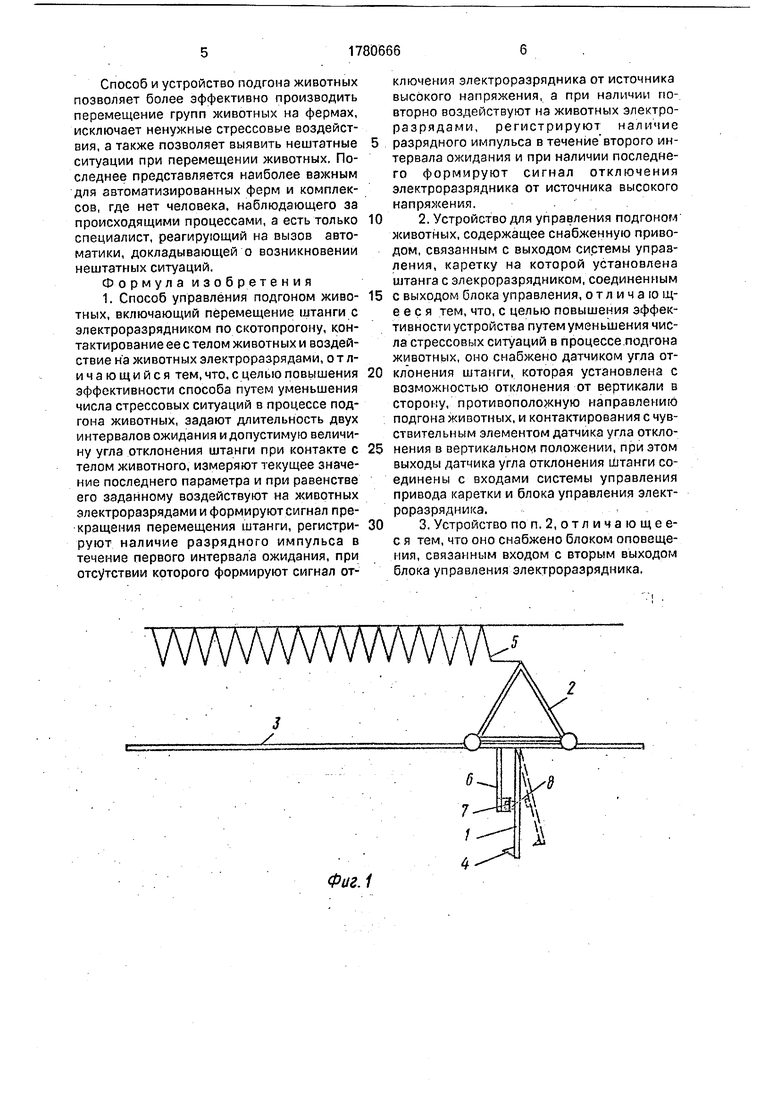
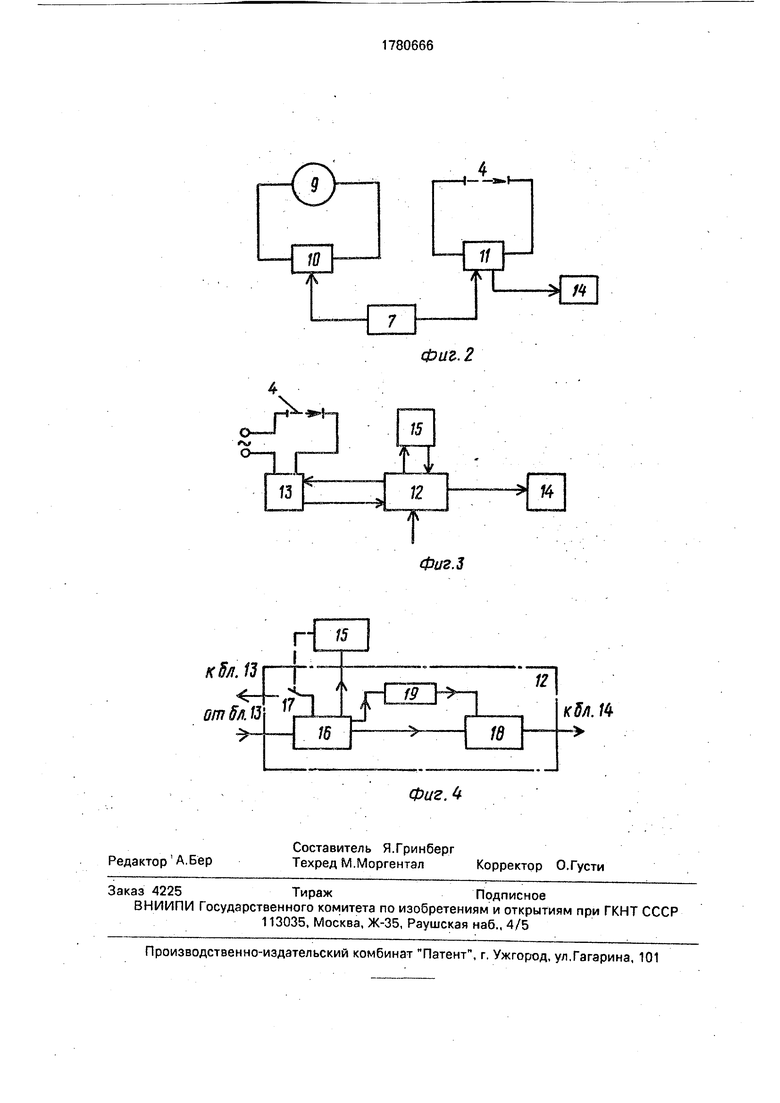
На фиг. 1 изображена схема устройства подгона животных; на фиг. 2 - схема цепи управления двигателем привода и разрядником; на фиг. 3 - структурная схема устройства управления разрядником; на фиг. 4 - схема командно-отчетного элемента.
Устройство управления подгоном животных включает штангу 1, подвешенную на каретке 2, перемещающейся по направляющей 3. Питание привода каретки 2 и разрядника 4, установленного на конце штанги 1, осуществляется посредством кабель-шторы 5. Каретка 2 несет также кронштейн 6 с датчиком 7 отключения штанги 1 от вертикали, выполненным, например, в виде датчиков серии ПИЩ-6, взаимодействующих с флажком 8, установленным на штанге 1. Срабатывание датчика 7 происходит при выводе флажка 8 из прорези датчика 7, т. е. при отклонении штанги 1 на некоторый угол.
Привод каретки 2 включает двигатель 9 и систему 10 управления им, причем к одному из входов системы 10 управления подключен датчик 7. Сигнал от датчика 7 поступает также на вход блока 11 управления разрядником 4.
Блок 11 включает командно-счетный элемент 12, к первому входу которого подключен выход датчика 7. Ко второму входу и первому выходу элемента 12 выход и вход преобразователи 13, обеспечивающего подачу высокого напряжения на разрядник 4 и фиксирующего факт разряда. К третьему входу и второму выходу элемента 12 подключены соответственно выход и вход таймера 15, а к третьему выходу элемента 12 - элемент 14 оповещения.
В качестве преобразователя 13 мы использовали генератор высокого напряжения от электроизгороди ИЭ-200 (серийный), заряжающий конденсатор. Последний соединен со счетчиком 16 (реле счетно-импульсное ВЛ-36, настроенное на один импульс). Сигнал о прохождении импульса (т. е. о разряде через тело животного) идет на таймер 15 (реле времени ВЛ-59) и управляющий ключом 17, не дающим возможности повторить разряд ранее заданного времени. Сигнал от счетчика 16 идет также на счетчик 18
(реле ВЛ-36, настроенное на подсчет двух импульсов) и на реле времени 19 (реле ВЛ- 59, настроенное на время большее, чем блок 15). Если сразу после замыкания ключа 17
происходит повторный разряд, то счетчик 18 срабатывает на оба разряда, и дает сигнал элементу оповещения 14. Если повторного разряда за 3 ... 5 с нет, то реле 19 гасит счетчик 18 и счет импульсов снова начинаетсяс нуля.
Устройство управления подгоном животных работает следующим образом.
После того, как животные вошли в скотопрогон вслед им перемещают каретку 2 и,
соответственно, штангу 1 с наперед заданной скоростью. Если животное приостановилось, то штанга 1 войдет во взаимодействие с животным. В большинстве случаев такого соприкосновения окажется достаточно, чтобы побудить животное к движению, но если животное не сдвинется, то штанга 1 отклонится и займет положение, показанное на фиг. 1 пунктиром. Как только угол отклонения штанги достигнет заданной
величины (она определяется из конструктивных соображений, и в нашем случае равна 15 ) сигнал от датчика 7 пойдет в систему 10 и двигатель остановится вплоть до тех пор, пока штанга 1 не вернется в вертикальное положение.
Одновременно с этим сигнал от датчика 7 поступит на вход элемента 12, который тут же даст команду преобразователю 13 на
подачу высокого напряжения к разряднику 4, и команду таймеру 15 на отсчет промежутка времени. Если преобразователь 13 за 3... 5 секунд не даст подтверждения того, что разряд произведен, т. е. штанга отклонилась не под воздействием животного, то элемент 12 даст сигнал элементу 14 на оповещение оператора о нештатной ситуации. Если преобразователь 13 даст подтверждение разряда, то по сигналу от преобразователя 13 элемент 12 даст команду таймеру 15 на новый отсчет интервала. Если по прошествии 3 ... 5 с заданного интервала (о чем сообщит таймер 15) от датчика 7 не поступит сигнал о движении животного и
возвращении штанги 1 в вертикальное положение, то элемент 12 даст команду на повторение разряда, и после того что разряд будет произведен, снова запросит от таймера 15 отсчет времени. По окончании второго
интервала таймер 15 сообщит об этом элементу 12. Если сигнал от датчика 7 и в этом случае не изменился, то элемент 12 действие разрядами прекращает, и дает команду элементу 14 на оповещение оператора о происходящем.
Способ и устройство подгона животных позволяет более эффективно производить перемещение групп животных на фермах, исключает ненужные стрессовые воздействия, а также позволяет выявить нештатные ситуации при перемещении животных. Последнее представляется наиболее важным для автоматизированных ферм и комплексов, где нет человека, наблюдающего за происходящими процессами, а есть только специалист, реагирующий на вызов автоматики, докладывающей о возникновении нештатных ситуаций.
Формула изобретения 1. Способ управления подгоном живо- тных, включающий перемещение штанги с электроразрядником по скотопрогону, контактирование ее с телом животных и воздействие на животных электроразрядами, отличающийся тем, что, с целью повышения эффективности способа путем уменьшения числа стрессовых ситуаций в процессе подгона животных, задают длительность двух интервалов ожидания и допустимую величину угла отклонения штанги при контакте с телом животного, измеряют текущее значение последнего параметра и при равенстве его заданному воздействуют на х ивотных электроразрядами и формируют сигнал прекращения перемещения штанги, регистри- руют наличие разрядного импульса в течение первого интервала ожидания, при отсутствии которого формируют сигнал отключения электроразрядника от источника высокого напряжения, а при наличии повторно воздействуют на животных электроразрядами, регистрируют наличие разрядного импульса в течение второго интервала ожидания и при наличии последнего формируют сигнал отключения электроразрядника от источника высокого напряжения.
2.Устройство для управления подгоном животных, содержащее снабженную приводом, связанным с выходом системы управления, каретку на которой установлена штанга с элекроразрядником,соединенным с выходом блока управления, отличающееся тем, что, с целью повышения эффективности устройства путем уменьшения числа стрессовых ситуаций в процессе подгона животных, оно снабжено датчиком угла отклонения штанги, которая установлена с возможностью отклонения от вертикали в сторону, противоположную направлению подгона животных, и контактирования с чувствительным элементом датчика угла отклонения в вертикальном положении, при этом выходы датчика угла отклонения штанги соединены с входами системы управления привода каретки и блока управления электроразрядника.
3.Устройство по п. 2, о т л и ч а ю щ е е- с я тем, что оно снабжено блоком оповещения, связанным входом с вторым выходом блока управления электроразрядника.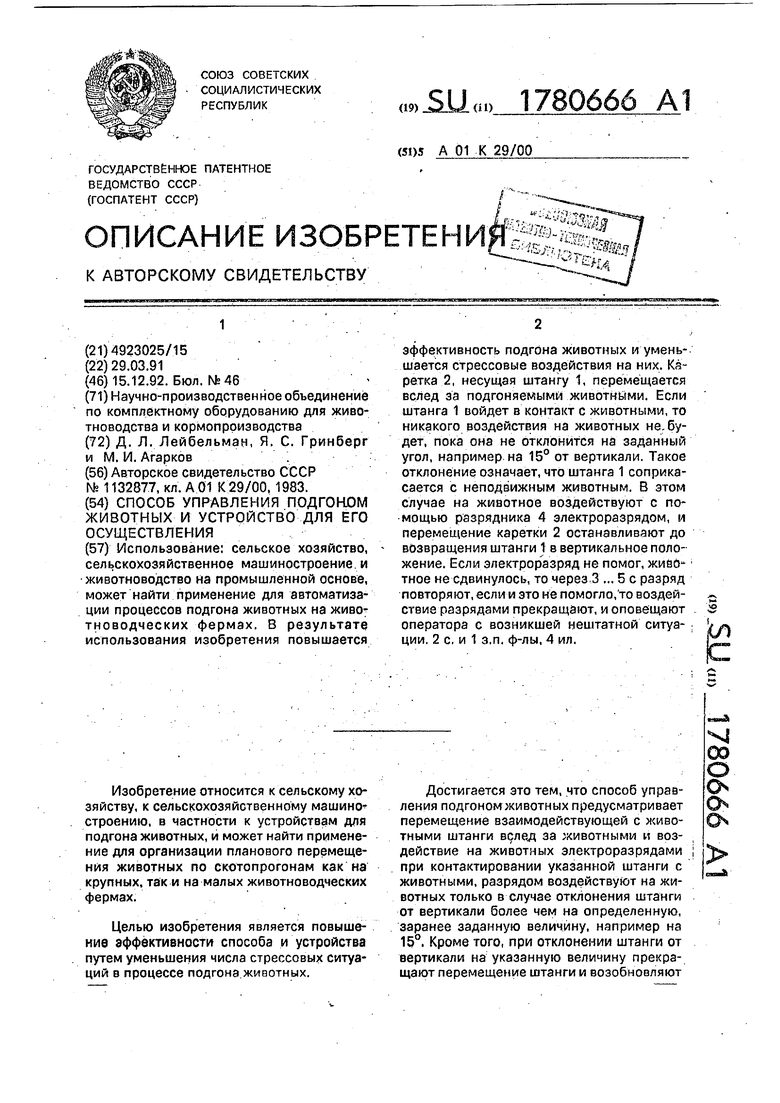
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разделения стада животных на группы по состоянию здоровья | 1991 |
|
SU1813383A1 |
| Способ и устройство порционной пастьбы животных | 2019 |
|
RU2730866C1 |
| СИСТЕМА ИМПУЛЬСНО-ПЕРИОДИЧЕСКОЙ ЗАРЯДКИ | 2014 |
|
RU2560716C1 |
| Система кормления животных | 1987 |
|
SU1464981A1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2001 |
|
RU2177647C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОНТРОЛЬНО-УПРАВЛЯЮЩАЯ СИСТЕМА | 1998 |
|
RU2147145C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ УТЕЧКИ ТЕКУЩИХ СРЕД И ТРЕВОЖНОГО ОПОВЕЩЕНИЯ | 2008 |
|
RU2358252C1 |
| Метательное электрошоковое оружие | 2022 |
|
RU2782040C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ОПОВЕЩЕНИЯ ПИЛОТА О ДИСТАНЦИИ ТОРМОЖЕНИЯ ВОЗДУШНЫХ СУДОВ НА ЭТАПЕ ПОСАДКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2781533C1 |
| СИСТЕМА ИМПУЛЬСНО-ПЕРИОДИЧЕСКОЙ ЗАРЯДКИ | 2017 |
|
RU2660171C1 |
Использование: сельское хозяйство, сельскохозяйственное машиностроение и животноводство на промышленной основе, может найти применение для автоматизации процессов подгона животных на животноводческих фермах. В результате использования изобретения повышается эффективность подгона животных и уменьшается стрессовые воздействия на них, Каретка 2, несущая штангу 1, перемещается вслед за подгоняемыми животными. Если штанга 1 войдет в контакт с животными, то никакого воздействия на животных не. будет, пока она не отклонится на заданный угол, например на 15° от вертикали. Такое отклонение означает, что штанга 1 соприкасается с неподвижным животным. В этом случае на животное воздействуют с помощью разрядника 4 электроразрядом, и перемещение каретки 2 останавливают до возвращения штанги 1 в вертикальное положение. Если электроразряд не помог, жиаб тное не сдвинулось, то через 3 ... 5 с разряд повторяют, если и это не помогло, то воздействие разрядами прекращают, и оповещают оператора с возникшей нештатной ситуации. 2 с, и 1 з.п. ф-лы, 4 ил.
Фиг. 1
9
/N
11
14
Фиг. 2
Т
Фиг.З
| Устройство для подгона животных | 1983 |
|
SU1132877A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
