Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов и промышленных роботов, и может найти применение при автоматизации сборочных и погрузочно-разгрузочных процесса.
Известен захват, содержащий основание и рабочий элемент, выпускной и впускной клапаны и расположенным на наружной поверхности основания датчиком индуктивности, а основание представляет собой полый цилиндр, на внутренней поверхности которого закреплен рабочий элемент в виде эластичной оболочки, разделенной на секции.
Однако, существенным недостатком этого устройства является получение при эксплуатации значительных дефектов на эластичной оболочке, что приводит к ее разгерметизации и выходу из строя в результате порезов об острые края изделия, подлежащих захвату, в частности о края металлической пробки, а также о сколотые края горловины бутылок, что уменьшает эксплуатационную надежность.
Наиболее близким техническим решением .является захват, содержащий полый корпус, открытый со стороны рабочего торца, причем на внутренней поверхности корпуса по периметру закреплена эластичная оболочка, образующая с этой поверхностью камеру, соединенную с источником рабочей среды.
Недостатком этого устройства является уменьшение надежности при эксплуатации и точности позиционирования детали.
Цель изобретения - повышение надежности работы захвата и повышение точности позиционирования детали.
i
;xi
СО
Ю
:оо
Сущность изобретения состоит в том, что захват, содержащий полый корпус, открытый со стороны рабочего торца, причем на внутренней поверхности корпуса по периметру закреплена эластичная оболочка, образующая с этой поверхностью камеру, соединенную с источником рабочей среды.
На внутренней поверхности оболочки выполнены равномерно расположенные по ее периметру, по крайней мере, три направляющих выступа чередующиеся с участками оболочки, выполненными с рифлением в виде насечек, параллельных оси корпуса, при этом соотношение внутреннего радиуса участков с рифлением к внутреннему радиусу выступов равно 1,01-1,05.
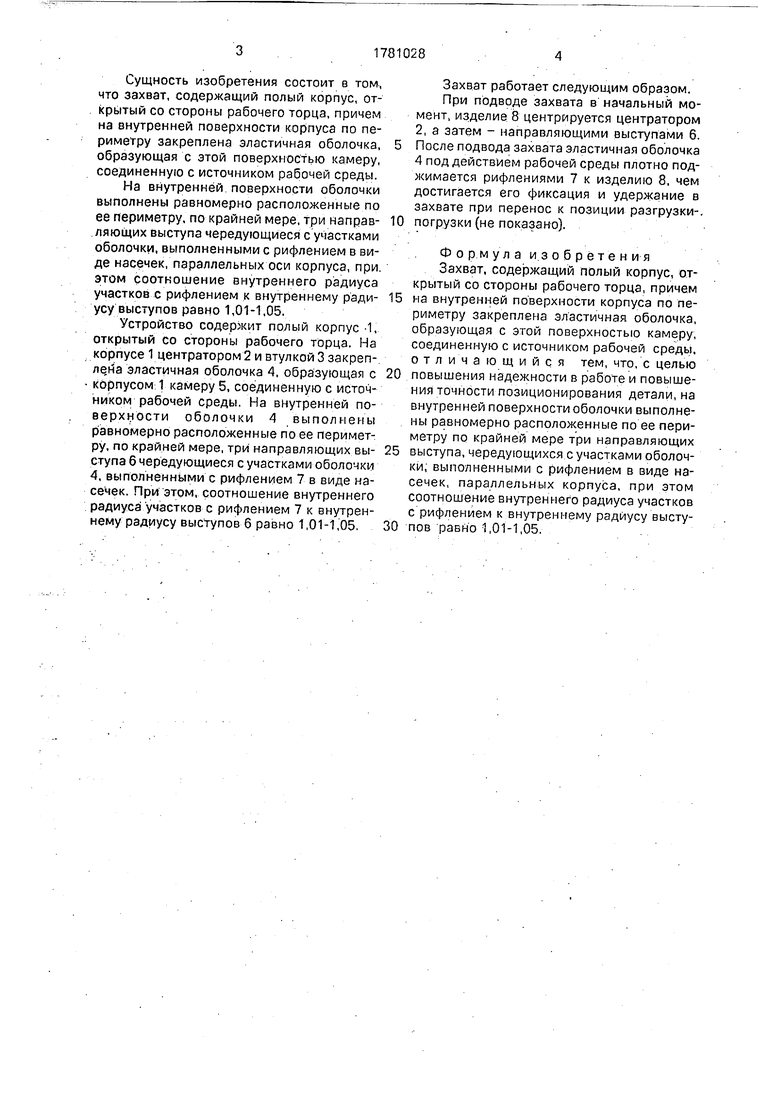
Устройство содержит полый корпус 1, открытый со стороны рабочего торца. На корпусе 1 центратором 2 и втулкой 3 закреп- ле,на эластичная оболочка 4, образующая с корпусом 1 камеру 5, соединенную с источником рабочей среды. На внутренней поверхности оболочки 4 выполнены равномерно расположенные по ее периметру, по крайней мере, три направляющих выступа 6 чередующиеся с участками оболочки 4, выполненными с рифлением 7 в виде насечек. При этом, соотношение внутреннего радиуса участков с рифлением 7 к внутреннему радиусу выступов 6 равно 1,01-1,05.
Захват работает следующим образом.
При подводе захвата в начальный момент, изделие 8 центрируется центратором 2, а затем - направляющими выступами 6. После подвода захвата эластичная оболочка 4 под действием рабочей среды плотно поджимается рифлениями 7 к изделию 8, чем достигается его фиксация и удержание в захвате при перенос к позиции разгрузки-, погрузки (не показано).
Формула изобретения Захват, содержащий полый корпус, открытый со стороны рабочего торца, причем
на внутренней поверхности корпуса по периметру закреплена эластичная оболочка, образующая с этой поверхностью камеру, соединенную с источником рабочей среды, отличающийся тем, что, с целью
повышения надежности в работе и повышения точности позиционирования детали, на внутренней поверхности оболочки выполнены равномерно расположенные по ее периметру по крайней мере три направляющих
выступа, чередующихся с участками оболочки, выполненными с рифлением в виде насечек, параллельных корпуса, при этом соотношение внутреннего радиуса участков с рифлением к внутреннему радиусу выступов равно 1,01-1,05.
Фиг 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАКЕР | 2002 |
|
RU2215864C1 |
| УПЛОТНЕНИЕ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖУЩЕГОСЯ ШТОКА | 2005 |
|
RU2289050C1 |
| ПНЕВМАТИЧЕСКОЕ РЕВЕРСИВНОЕ УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ ДЛЯ ПРОХОДКИ СКВАЖИН В ГРУНТЕ | 1992 |
|
RU2054505C1 |
| СПОСОБ КОМБАЙНОВОЙ УБОРКИ СЕМЕННЫХ ПОСЕВОВ ГОРЧИЦЫ ПРИ ВОЗДЕЛЫВАНИИ В РИСОВЫХ ЧЕКАХ И МОЛОТИЛЬНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2471335C2 |
| Водозаборная колонка | 1990 |
|
SU1776733A1 |
| Устройство для опробования водоносных горизонтов в скважинах | 1986 |
|
SU1361320A1 |
| СПОСОБ ПОДГОТОВКИ К ЭКСПЛУАТАЦИИ НАРЕЗНЫХ НЕФТЕГАЗОПРОМЫСЛОВЫХ ТРУБ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312201C1 |
| ЗАЩИТНЫЙ ЧЕХОЛ ДЛЯ ВРЕМЕННО НЕЭКСПЛУАТИРУЕМОГО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2215105C1 |
| ТРАНСПОРТНЫЙ КОНТЕЙНЕР ДЛЯ ТРАНСПОРТИРОВКИ БОКСА-СТЕРИЛИЗАТОРА | 2007 |
|
RU2360637C1 |
| Захват промышленного робота | 1987 |
|
SU1465308A1 |

Использование: в захватных устройствах манипуляторов при автбматизации сбо- рочных и погрузочно-разгрузочных , tч SSS s S feSSSS S -jrt-.rr-v 2 процессов. Сущность изобретения: захват содержит полый корпус, открытый со стороны рабочего торца, причем на внутренней поверхности корпуса по периметру закреплена эластичная оболочка, образующая с этой поверхностью камеру, соединенную с источником рабочей среды. На внутренней поверхности оболочки выполнены равномерно расположенные по ее периметру по крайней мере три направляющих выступа, чередующиеся с участками оболочки, выполненными с рифлением в виде насечек, параллельных оси корпуса, при этом соотношение внутреннего радиуса участков с рифлением к внутреннему радиусу выступов 1,01-1,05.2 ил. сл С
| Козырев Ю.Г | |||
| Промышленные роботы, Справочник, М.: Машиностроение, 1983, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
