Изобретение относится к системам управления технологическими процессами и может быть использовано для адаптивного управления технологическими процессами в условиях наличия неизмеряемых неуправляемых входов объекта, существенно влияющих на качество управления. При этом регулирование отдельных переменных технологического процесса осуществляется локальными регулирующими устройствами.
Примером таких объектов могут быть, например, металлургические агрегаты: прокатные станы, сталеплавильные и доменные печи. Такие объекты часто имеют неизмеряемые неуправляемые входы т.е. такие входы, сигналы которых недоступны для
прямого управления и не поддаются непосредственному измерению. Например, для объекта - непрерывного широкополосного стана горячей прокатки полос неуправляе- мым неизмеряемым входом в числе других является температура сляба и ее объемное распределение. Эта температура определяется конструкцией и режимом работы нагревательных устройств, физико-химическими свойствами и размерами сляба и может быть оценена лишь грубыми косвенными методами, т.к. слябы покрыты толстым слоем окалины и разогреты неравномерно по объему. В то же время температура сляба оказывает значительное влияние на ход прокатки и ее результаты - достижение заvj
00
-
ON VI
О
данных размеров проката и его физические свойства. Число классов неизмеряемого неуправляемого входа может определяться, например, числом нагревательных устройств с различной конфигурацией или режимом, количеством рабочих-операторов этих устройств с разной личной манерой управления процессом нагрева, и т.п.
Известна система адаптивного управления, содержащая последовательносоеди- ненныеблокформирования
корректирующих воздействий, блок формирования управляющих воздействий и объект управления, Недостатком этой системы является невысокое качество управления, т.к. при определении оптимальных управляющих воздействий не учитывались ни значения сигналов неуправляемых входов объекта управления, ни влияние неизмеряемых входов объекта управления.
Известно устройство для адаптивного управления технологическим процессом, принятое нами в качестве прототипа, содержащее последовательно соединенные блок формирования корректирующих воздействий, блок формирования управляющих воздействий, блок исполнительных механизмов и объект управления, а также блок измерения сигналов управляемых входов, блок измерения сигналов неуправляемых входов и блок измерения показателей качес тва, причем, входы блока измерения сигналов управляемых входов и блока измерения сигналов неуправляемых входов соединены с соответствующими входами объекта управления, а входы блока измерения показателей качества соединены с выходами объекта управления.
Недостатком этого устройства является невысокое качество управления, поскольку выбор управляющих воздействий осуществляется без учета влияния неизмеряемых входов объекта управления, которые оказывают существенное влияние на оптимальные значения управляемых переменных.
Целью изобретения является повышение качества управления технологическим процессом.
Цель достигается за счет того,что в систему адаптивного управления технологическим процессом, содержащую последовательно соединенные блок формирования корректирующих воздействий, блок формирования управляющих воздействий и блок исполнительных механизмов, выходы которого подключены к входам блока измерения сигналов управляемых входов и к упраляемым входам объекта управления, неуправляемые входы объекта управления соединены с входами блока измерения сигналов неуправляемых входов, а выходы объекта упралвения соединены с входами блока измерения показателей качества, введен блок классификации наблюдений, первая
группа информационных входов которого соединена с выходами блока измерения сигналов управляемых входов, вторая группа информационных входов блока классификации наблюдений соединена с выходами бло0 ка измерения сигналов неуправляемых входов, третья группа информационных входов блока классификации наблюдений соединена с выходами блока измерения показателей качества, и блок определения оп5 тимальных управляющих воздействий, информационный вход которого соединен с выходом блока классификации наблюдений, первая группа информационных входов - с выходами блока измерения
0 показателей качества, вторая группа информационных входов - с выходами блока измерения сигналов управляемых входов, выход блока определения оптимальных управляющих воздействий подключен к вхо5 дам блока формирования корректирующих воздействий и ко вторым входам блока формирования управляющих воздействий, а также задатчик классов и задатчик режимов, выходы которых соединены соответственно
0 с входами задания блока классификации наблюдений и блока определения оптимальных управляющих воздействий, при этом объект управления имеет неизмеряемые входы р классов,
5 Одновременно блок классификации наблюдений содержит узлы, состоящие из первого сумматора и цепочек из второго сумматора и первого множительного эле мента, два входа которого соединены с вы
0 ходом второго сумматора, выходы первых множительных элементов являются выходами цепочек и подключены к входам первого сумматора, число цепочек в каждом узле равно сумме числа управляемых входов, не5 управляемых входов и выходов блока измерения показателей качества, число узлов равно числу р классов неизмеряемых входов объекта управления, первые входы соответствующих вторых сумматоров каждого узла
0 объединены и образуют соответственно первую, вторую и третью грпуппу информационных входов блока классификации наблюдений, вторые входы вторых сумматоров всех узлов являются входами
5 задания блока классификации наблюдений, выход каждого первого сумматора соединен с первыми входами первых элементов сравнения, число которых на каждый сумматор на единицу меньше числа узлов, и со вторыми входами других первых элементов сравнения, число которых также на единицу меньше числа узлов, причем, первые входы каждого из этих других первых элементов сравнения подключены соответственно к выходам всех других первых сумматоров, общее число первых элементов сравнения равно удвоенному числу сочетаний из числа узлов по два, выходы первых элементов сравнения, первые входы которых соединены с одним и тем же первым сумматором, подключены к входам элементов И, число элементов И равно числу узлов, выходы элементов И подключены к входам шифратора, выход которого является выходом блока классификации наблюдений.
Кроме того, блок определения оптимальных управляющих воздействий содержит вторые множительные элементы, число которых равно числу выходов блока измерения показателей качества, первые входы вторых множительных элементов образуют первую группу информационных входов блока определения оптимальных управляющих воздействий, вторые вхбды вторых множительных элементов являются входами задания блока определения оптимальных управляющих воздействий, выходы вторых множительных элементов соединены с входом третьего сумматора, -а также запоминающее устройство, адресный вход которого является информационным входом блока определения оптимальных управ- ляющих воздействий, выход третьего сумматора подключен к первому входу второго элемента сравнения и к первому информационному входу запоминающего устройства, первый информационный выход запоминающего устройства соединен со вторым входом второго элемента сравнения, выход второго элемента сравнения со- единен с входом элемета НЕ и с управляющими входами первой группы элементов ЗАПРЕТ, информационные входы которых образуют вторую группу информационных входов блока определения оптимальных управляющих воздействий, выход элемента НЕ соединен с управляющим входом запоминающего устройства и с управляющими входами второй группы элементов ЗАПРЕТ, информационные входы которых соединены со вторыми информационными выходами запоминающего устройства, выходы первой группы элементов ЗАПРЕТ соединены со вторыми информационными входами запоминающего устройства и с первым входом группы элементов ИЛИ, вторые входы группы элементов ИЛИ соединены с выходами второй группы элементов ЗАПРЕТ, выходы группы элементов ИЛИ являются выходами блока
определения оптимальных управляющих воздействий, число элементов ЗАПРЕТ первой группы равно числу элементов ЗАПРЕТ второй группы, а также равно числу элемен- тов ИЛИ и равно числу управляемых входов объекта управления.
Введение в систему блока классификации наблюдений и блока определения оптимальных управляющих воздействий, а
также задатчика классов и задатчика режимов позволяет повысить качество управления за счет раздельного определения оптимальных управляющих воздействий по классам наблюдаемых величин, причем
класс объединяет наблюдения, соответствующие близким значениям совокупности параметров неизмеряемых входов объекта управления, оценка близости параметров осуществляется блоком классификации наблюдений.
Предложенная система управления инвариантна к системе уравнений, описывающих объект управления, поскольку функционирование системы управления
описывается не системой уравнений, описывающих объект управления, а выбранным при проектировании системы разбиением наблюдений на классы и критерием управления. Система обеспечивает управление
объектом в соответствии с выбранным критерием управления (целевой функцией от показателей качества объекта управления) так, что управляющие воздействия на следующий временной интервал, выбор которых
осуществляется в блоке 6 определения оптимальных управляющих воздействий, всегда обеспечивают минимальное значение целевой функции среди конечного числа допустимых управляющих воздействий на текущем временном интервале. Направление изменения управляющих воздействий - улучшение критерия управления. Система управления с использованием предлагаемого технического решения обладает выгодно отличающими ее свойствами: управление в ней осуществляется с учетом не только действующих на объект неуправляемых воздействий, но и ненаблюдаемых факторов, не теряя при этом свойств динамичности, адаптивности и устойчивости.
Устойчивость системы, понимая под этим термином ограниченность приращения управляющих воздействий при ограни- ченном изменении входных данных (см. /10/, стр. 12), обеспечивается тем, что при изменениях входных переменных, ограниченных одним классом, управляющие воздействия гарантированно выбираются из одного и того же класса в условиях действия
одного и того же критерия управления и, следовательно, ограничены размерами класса.
Динамичность управления следует из учета временных изменений векторов неуправляемых переменных, управляемых пере- менных, показателей качества и принадлежности совокупности п-эременных классам.
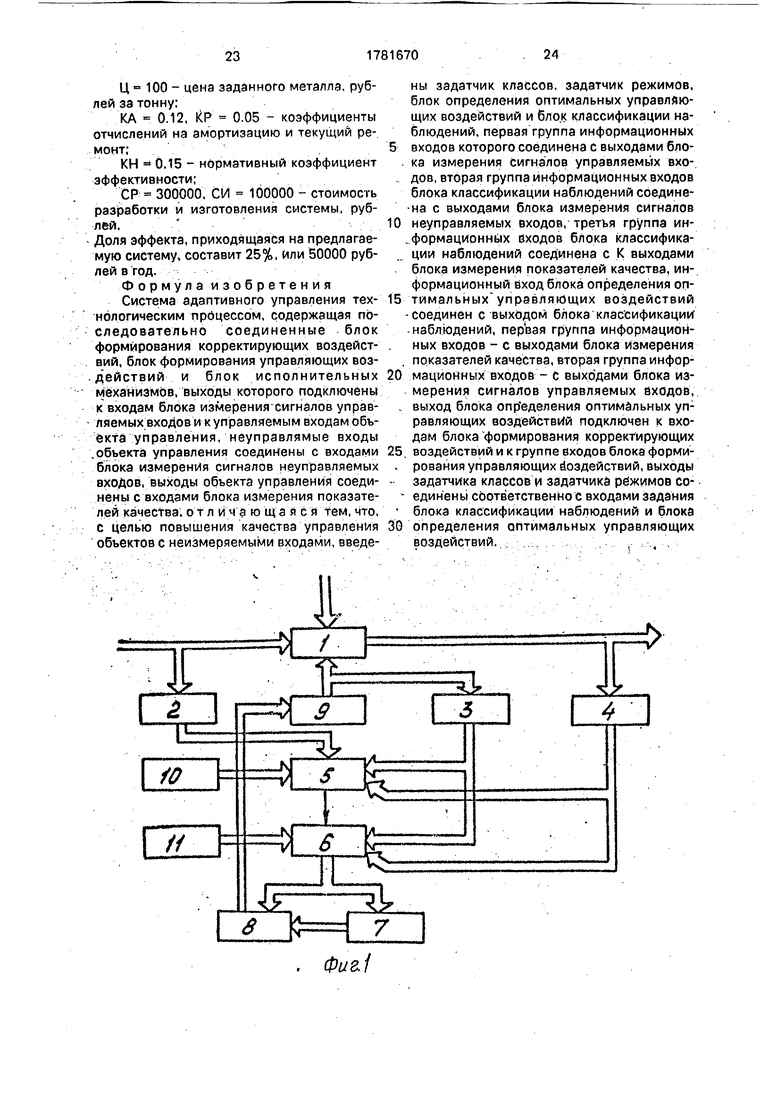
Адаптивность управления обеспечивается изменением вектора принадлежности классам в темпе с изменениями всех наблюдаемых и ненаблюдаемых входных величин. На фиг. 1 приведена блок-схема системы; на фиг. 2 - блок-схема блока классификации наблюдений; на фиг. 3 - блок-схема блока определения оптимальных управляющих воздействий.
Система (фиг. 1) содержит объект управления 1cm управляемыми входами, п неуправляемыми входами, неизмеряемыми входами р классов, бло к 2 измерения сигналов неуправляемых входов, блок 3 измерения сигналов управляемых входов, блок 4 измерения показателей качества с k выходами, блок 5 классификации наблюдений, блок 6 определения оптимальных управляющих воздействий, блок 7 формирования корректирующих воздействий, блок 8 формирования управляющих воздействий, блок 9 исполнительных механизмов, задатчик классов 10 и задатчик режимов 11.
Неуправляемые п входов объекта управления 1 соединены с п входами блок. 2 измерения сигналов неуправляемых входов, выходы объекта управления 1 подключены к входам блока 4 измерения показателей качества, m выходов блока 3 измерения сигналов управляемых входов соединены с первой группой информационных входов блока 5 классификации наблюдений, вторая группа информационных входов блока 5 классификации наблюдений соединена с п выходами блока 2 измерения сигналов неуправляемых входов, а третья группа информационных входов блока 5 классификации наблюдений соединена с k выходами блока 4 измерения показателей качества, при этом p«(m+n+k) входов задания блока 5 классификации наблюдений соединены с выходами задатчика классов 10, а выход блока 5 классификации наблюдений соединен с информационным входом блока 6 определения оптимальных управляющих воздействий. Задатчик режимов 11 своими k выходами соединен с соответствующими k входами задания блока 6 определения оптимальных управляющих воздействий, первая группа информационных входов которого соединена с k выходами блока 4 измерения
показателей качества, а третья группа информационных входов (т входов) с т выходами блока 3 измерения сигналов управляемых входов т выходов блока 6 определения оптимальных управляющих воздействий подключены к m входам блока 7 формирования корректирующих воздействий и к m вторым входам блока-8 формирования управляющих воздействий, при этом
0 m первых входов блока 8 формирования управляющих воздействий соединены с m выходами блока 7 формирования корректирующих воздействий, a m выходов блока 8 формирования управляющих воз5 действий соединены с соответствующими m входами блока 9 исполнительных механизмов, m выходов блока 9 исполнительных механизмов подключены к m управляемым входам объекта управления 1 и к m входам
0 блока 3 измерения сигналов управляемых входов,
Объект управления представляет собой, например, непрерывный широкополосный стан горячей прокатки стальных полос, Ко5 личество классов р зависит от ненаблюдаемых факторов, действующих на объект управления, и равно числуо различных комбинаций из всех возможных качественных значений этих факторов. Количество клас0 сов определяется, исходя из особенностей конкретного объекта управления, на стадии предварительной разработки системы.
Для объекта управления - непрерывного широкополосного стана горячей прокат5 ки - можно привести следующий упрощенный набор входных и выходных переменных:
управляемые входы (два): вертикальные и горизонтальные обжатия заготовки (или
0 отклонения этих обжатий от какой-либо базы);
неуправляемый вход (один): толщина заготовки (или ее отклонение от заданной, от какой-либо базы и т.п.);
5 выходы (два): толщина и ширина проката (или их отклонения от задания на прокатку);
показатели качества (два): среднеквад- ратическое отклонение толщины полосы от
0 задания (от номинала) по всей длине полосы, среднеквадратическое отклонение ширины полосы от задания по всей длине полосы;
неизмеряемые входы: различные режи5 мы нагрева заготовки (сляба), характеризующиеся особенностями конструкции нагревательных устройств (например - на стане разные печи, из которых выдаются слябы на прокатку произвольным образом), разные бригады операторов с индивидуальными особенностями ведения процесса нагрева и т.д. - всего три вида режимов, т.е. - три класса неизмеряемых входов.
Для такого упрощенного набора переменных, характеризующих систему управления может быть использована целевая функция вида:
С К1 Z1 + К2 Z2 , где С - значение целевой функции;
К1, К2 - коэффициенты при переменных целевой функции;
Z1 - первый показатель качества, например, среднеквадратическое отклонение толщины полосы от задания по всей длине полосы;
Z2 - второй показатель качества, например, среднеквадратическое отклонение ширины полосы от задания по всей длине полосы.
Целью управления является выпуск проката с минимальным среднеквадратиче- ским отклонением по толщине и ширине от задания с учетом влияния неизмеряемых входов объекта управления, т.е. необходимо выдавать управляющие воздействия на исполнительные механизмы с адаптацией под текущий класс неизмеряемых входов (в зависимости оттого, как именно была нагрета заготовка перед прокаткой),
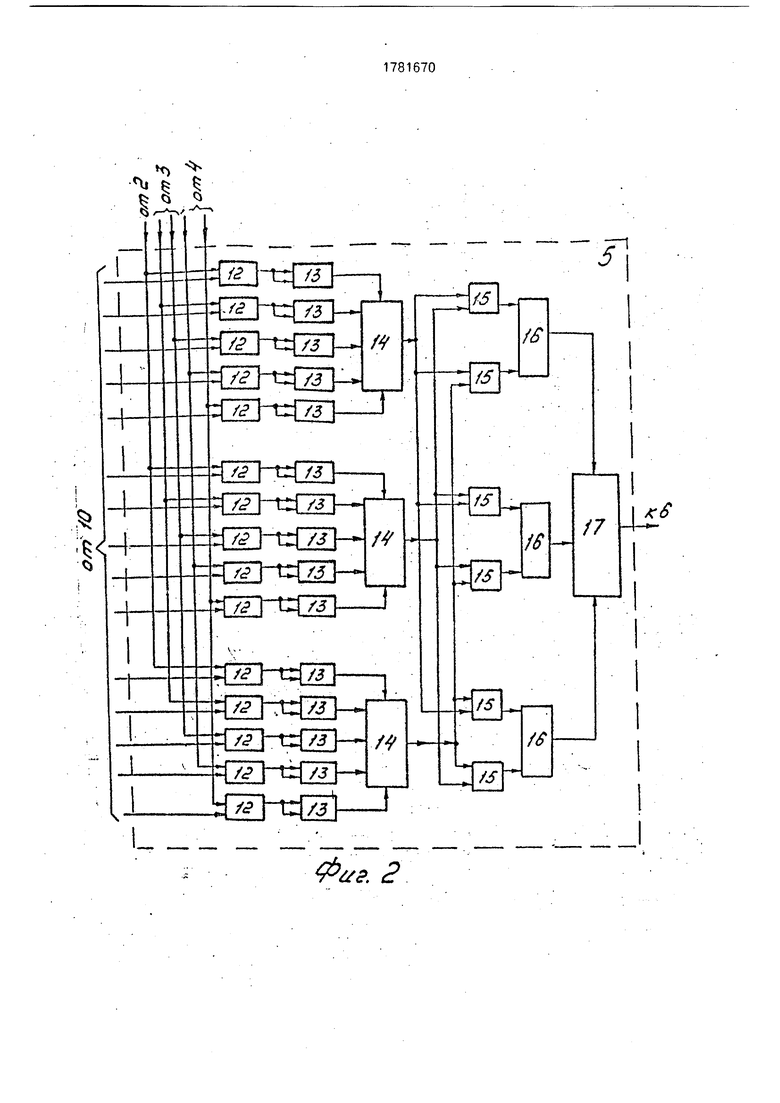
Блок 5 классификации наблюдений (фиг. 2) содержит р узлов (например -3), состоящих из m+n+k (например - 2+1+2) цепочек (р - количество классов неизмеряемых входов, m - количество управляемых входов, п - количество неуправляемых входов, k - количество выходов блока измерения показателей качества) и первого сумматора
14.Каждая из цепочек содержит второй сумматор 12 и первый множительный элемент 13. Блок классификации наблюдений 5 включает в себя также первые элементы сравнения 15, количество которых на каждый из р узлов равно р-1, элементы И 16, число которых равно числу узлов р и шифратор 17. Таким образом, для m 2, n 1,k 2 и р 3 блок классификации наблюдений 5 содержит (см.фиг. 3): вторых сумматоров 12 - p(m+n+k)3(2+1+2) 15, первых множительных элементов 13 - p(m+n+k) 3(2+1+2)
15,первых сумматоров 14 - р 3, первых элементов сравнения 15 - р (р-1) 6, элементов И 16 - р 3, шифратор 17-1.
В каждой из цепочек, содержащих второй сумматор 12 и первый множительный элемент 13, оба входа первого множительного элемента 13 соединены с выходом второго сумматора 12,. вторые сумматоры 12 выполнены с прямым первым и инверсным вторым входами.
Первые входы втогЗЫ сумМато рой 1§ объединены по всем р узлам так, что с ббт- ветствующие m, n, k первых входов вторых сумматоров 12 образуют, соответственно, 5 первую, вторую и третью группы информационных входов блока 5 классификации наблюдений.
Вторые входы вторых сумматоров 12 всех узлов являются входами задания блока
0 5 классификации наблюдений, сигналы на этих входах соответствуют эталонным значениям, соответственно, m сигналов управляемых входов, п сигналов неуправляемых входов и k показателей качества для всех р
5 классов. Выходы первых множительных элементов 13 каждого узла являются выходами цепочек и соединены с входами первых суматоров 14 данного узла.
Выходы первых сумматоров 14 являют0 ся выходами узлов и соединены с первыми входами первых элементов сравнения 15, количество которых на каждый из первых сумматоров на единицу меньше числа узлов (например - 2, фиг. 2), и со вторым входами
5 других первых элементов сравнения, число которых также на единицу меньше числа узлов (например - 2), причем, первые входы каждого из этих других первых элементов сравнения подключены, соответственно, к
0 выходам всех других первых сумматоров, общее число первых элементов сравнения равно удвоенному числу сочетаний из числа узлов по 2 (например, для трех узлов число сочетаний из 3 по 2 равно 3, число первых
5 элементов сравнения равно 6). Выходы первых элементов сравнения, первые входы которых соединены с одним и тем же первым сумматором, подключены к входам элементов 16 И, число элементов И равно числу
0 узлов (например, 3), выходы элементов И подключены к входам шифратора 17, выход которого представляет собой шифр класса, к которому относится данное наблюдение. Наблюдение представляет собой совокуп5 ность значений переменных системы управления - интегральных значений измеренных величин сигналов управляемых входов объекта управления, неуправляемых входов объекта управления и показателей
0 качества системы управления, соответствующих одному и тому же временному интервалу (для объекта управления широкополосного стана горячей прокатки - интервалом является время проката одной
5 полосы). Шифр класса, к которому относит ся данное наблюдение, является выходом блока классификации наблюдений.
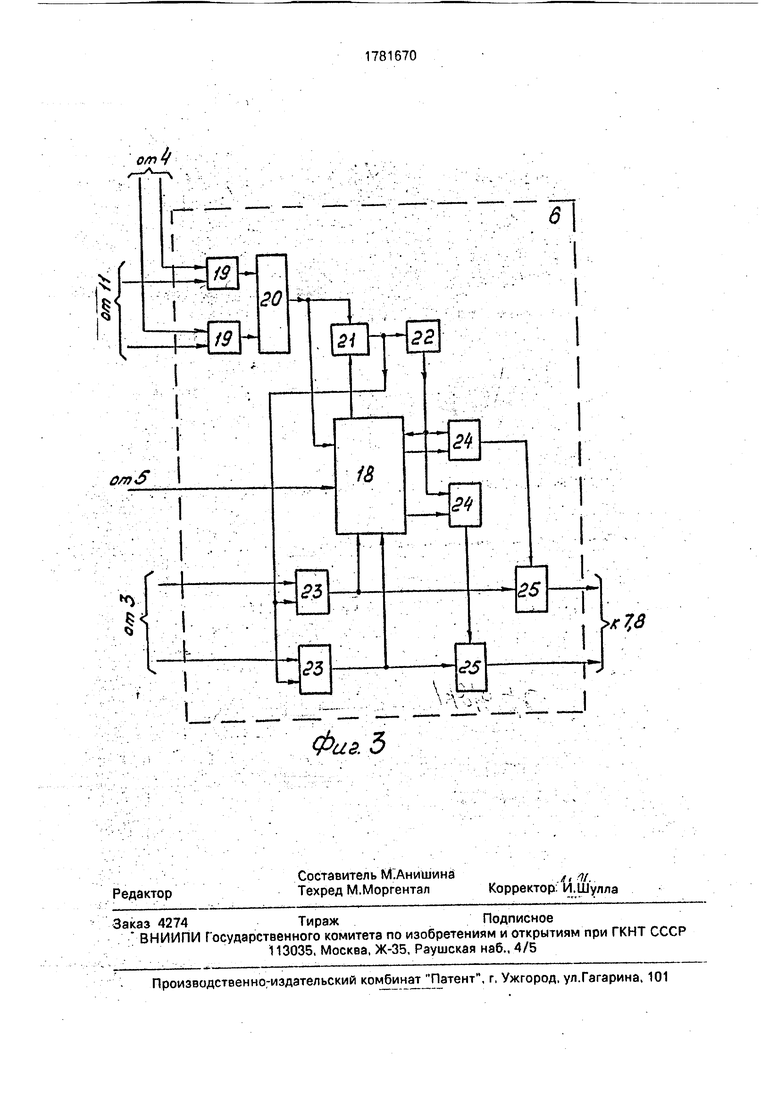
Блок 6 определения оптимальных управляющих воздействий (фиг. 3) содержит запоминающее устройство 18, группу из k
2 вторых множительных элементов 19, число которых равно числу выходов блока 4 измерения показателей качества, третий сумматор 20, второй элемент сравнения 21, элемент НЕ 22, элементы ЗАПРЕТ 23 первой группы, элементы ЗАПРЕТ 24 второй группы, и группу элементов 25 ИЛИ, число элементов 23 ЗАПРЕТ первой группы равно числу элементов 24 ЗАПРЕТ второй группы, а также равно числу m управляемых входов объекта управления.
Первые входы вторых множительных элементов 19 образуют первую группу информационных входов блока 6 определения оптимальных управляющих воздействий, вторые входы вторых множительных элементов 19 являются входами задания блока 6 определения оптимальных управляющих воздействий, выходы вторых множительных элементов 19 соединены со входом третьего сумматора 20,
Выход третьего сумматора 20 подключен к первому входу второго элемента сравнения 21 и к первому информационному входу запоминающего устройства 18.
Адресный вход запоминающего устройства 18 являетя информационным входом блока 6 определения оптимальных управляющих воздействий, первый информационный вход запоминающего устройства 18 соединен со вторым входом второго элемента сравнения 21, выход второго элемента сравнения 21 соединен с входом элемента НЕ и с управляющими входами элементов 23 ЗАПРЕТ первой группы.
Информационные входы элементов 23 ЗАПРЕТ первой группы образуют вторую группу информационных входов блока 6 определения оптимальных управляющих воздействий. Выход элемента НЕ 22 соединен с управляющим входом запоминающего устройства 18 и с управляющими входами элементов ЗАПРЕТ 24 первой группы. Информационные входы элементов ЗАПРЁТ второй группы соединены со вторыми информационными выходами запоминающего устройства и с первыми входами группы элементов 25 ИЛ И, Вторые входы группы элементов 25 ИЛИ соединены с выходами элементов 24 ЗАПРЕТ второй группы, выхо- дь1 группы элементов 25 ИЛИ являются выходами блока 6 определения оптимальных управляющих воздействий.
Система работает следующим образом.
Объект управления 1 (непрерывный широкополосный стан горячей прокатки) осуществляет технологический процесс, например, прокатку металла. На стан подаются нагретые заготовки (слябы). После обжатия слябов между валками клетей стана
сляб вытягивается в полосу. Блок 2 измерения сигналов неуправляемых входов измеряет воздействующие на объект управления неуправляемые переменные, Блок 3 измерения сигналов управляемых входов измеряет воздействующие на объект управления управляемые переменные (выходные переменные блока 9 исполнительных механизмов). Блок 4 измерения показателя качества
0 измеряет выходные переменные объекта управления 1 и преобразует их в показатели качества системы управления.
Измерение сигналов блоками 2, 3, 4 осуществляется, как это принято в измеритель5 ной технике, путем преобразования измеряемой величины (как электрического сигнала, так и не электрического) в стандартный электрический сигнал и его усредения, что интегрально (по всей полосе) характери0 зует процесс прокатки, Блок 4 измерения показателей качества дополнительно преобразует выходные переменные объекта управления 1 в показатели качества системы управления технологическим процессом.
5 Выходные сигналы блока 2 измерения сигналов неуправляемых входов, блока 3 измерения сигналов управляемых входов и блока 4 измерения показателей качества поступают соответственно на вторые, первые
0 и третьи группы информационных входов блока 5 классификации наблюдений, Кроме того, выходные сигналы блока 3 измерения сигналов управляемых входов и блока 4 измерения показателей качества поступают,
5 соответственно, на вторую и первую группы информационных входов блока 6 определения оптимальных управляющих воздействий. На входы задания блока 5 классификации наблюдений и блока 6 опре0 деления оптимальных управляющих воздействий поступают сигналы, соответственно, от задатчика классов 10 и задатчика режимов 11. Сигналы задания задатчика классов 10 представляют собой по5 классовые эталонные значения всех измеряемых входов и показателей качества объекта управления. Сигналы задания задатчика режимов 11 представляют собой ко- эффициенты целевой. функции при
0 показателях качества объекта управления, Блок классификации наблюдений 5 по состоянию всех измеряемых входов и показателей качества объекта управления системы (сигналы от блоков 2, 3 и 4) для текущего
5 наблюдения и поклассовым эталонным значениям всех измеряемых входов и показателей качества (сигналы от задатчика классов 10) определяет номер класса, к которому относится данное наблюдение Выбор номера класса осуществляется вычислением
расстояний в пространстве измеряемых переменных системы от точки текущего наблюдения до точ ек с эталонными значениями переменных и показателей качества по всем классам, и выбором номера класса, к которому относится текущее наблюдение, по минимальному из этих расстояний,
Блок 6 определения оптимальных управляющих воздействий по номеру класса текущего наблюдения (сигналы от блока 5 классификации наблюдений), значениям управляемых переменных и показателей качества (сигнал от блока 3 измерения сигналов управляемых входов и блока 4 измерения показателей качества) и коэффициентам целевой функции при показателях качества (сигналы от задатчика режимов 11) вырабатывает оптимальное управляющее воздействие для объекта управления на следующий временной интервал, длина которого равна времени проката одной полосы. Целевая функция представляет собой функцию от показателей качества, которая является численным выражением для качества управления, Определение оптимального управляющего воздействия осуществляется по текущему значению критерия оптимальности (для текущего наблюдения) и запомненному наилучшему значению критерия оптимальности для данного класса - или выбором известного (запомненного ранее) управления, или поддержанием текущего управления. Выработанное в блоке 6 определения оптимальных управляющих воздействий управление передается на входы блока 7 формирования корректирующих воздействий и блока 8 формирования управляющих воздействий.
Блок 7 формирования корректирующих воздействий по значениям оптимальных управляющих воздействий, поступающим с выхода блока 6 определения оптимальных управляющих воздействий, формирует значения корректирующих воздействий, которые с его выхода поступают на вход блока 8 формирования управляющих воздействий. Эти значения представляют собой коэффициенты, на которые необходимо умножить значения оптимальных управляющих воздействий, чтобы получить реально допустимые значения управляющих воздействий. Указанные коэффициенты имеют смысл ограничений, например, по технологическим режимам, по возможностям исполнительных механизмов, по соображениям техники безопасности и т.д. Блок 8 формирования управляющих воздействий для каждой управляемой переменной осуществляет умно- жение оптимальных управляющих
воздействий (выходные сигналы блока 6 формирования оптимальных управляющих воздействий) на коэффициенты (выходные сигналы блока 7 формирования корректиру- 5 ющих воздействий). Управляющие воздействия с выхода блока 8 формирования управляющих воздействий поступают на вход блока 9 исполнительных механизмов и через его исполнительные механизмы воз0 действуют на технологический процесс, осуществляемый объектом управления 1. Таким образом, после прокатки очередной полосы на выходах блоков 2, 3 и 4 формируются новые переменные системы и соответ5 ствующие им показатели качества. Для этих значений переменных и показателей качества блок 5 классификации наблюдений по эталонным значениям переменных и показателей качества для каждого класса (посту0 пающих с выходов задатчика классов 10) определяет номер класса, к которому относится данная полоса. Этот номер передается на информационный вход блока 6 определения оптимальных управляющих
5 воздействий. Блок 6 по номеру класса, сигналам управляемых входов, показателям качества и коэффициентам целевой функции для следующей полосы (поступающих с выходов задачика режимов 11) определяет ус0 тавки оптимальных управляющих воздействий для прокатки следующей полосы. Окончательное формирование уставок производится блоком 8 формирования управляющих воздействий перемножением
5 соответствующих выходных сигналов блоков 6 и 7. Сформированные таким образом уставки подаются на входы блока 9 исполнительных механизмов и определяют режимы работы исполнительных механизмов
0 объекта управления 1 на время прокатки следующей полосы, После прокатки следующей полосы процесс повторяется, причем, для каждой полосы выбирается управление, обеспечивающее поддержание или улучше5 ние значения целевой функции. Тем самым обеспечивается адаптивное управление технологическим процессом.
Блок 5 классификации наблюдений 0 (фиг. 2) работает следующим образом.
Вторые сумматоры 12, первые множительные элементы 13 и первые сумматоры 14 осуществляют вычисление расстояний в пространстве переменных систем от точки 5 текущего наблюдения до точек эталонных значений по классам, например, по формуле
d - S(J - f j)2 -I (УЧ - f m+q)2 +Ј (z, 2
Т m+n+lj ,,
где di - расстояние между точкой текущего наблюдения и точкой I- го класса с эталонными значениями измеряемых переменных;
xi, j 1...m- значения сигналов управляемых входов для текущего наблюдения;
f i, J 1 ...m - эталонные значения управляемых входов для 1-го класса;
yq, q 1...n - значения сигналов неуправляемых входов для текущего наблюдения;
f m+q, q 1 ...л - эталонные значения сигналов неуправляемых входов для 1-го класса;
2Ј. 1 1...k - значения выходных сигналов блока измерения показателей качества для текущего наблюдения;
f m+n+i, 1 - 1...k - эталонные значения показателей качества для 1-го класса,
Значения входных переменных и показателей качества объекта управления 1 для текущего наблюдения поступают на прямые входы первых сумматоров 12 для всех р узлов блока классификации наблюдений. На инверсные входы сумматоров 12 с выхода задатчика классов 10 поступают эталонные значения всех m+n+k измеряемых переменных системы для всех р классов. Определение эталонных значений осуществляется на стадии проектирования системы путем обработки экспериментальных данных по известным алгоритмам (8). Выходной сигнал каждого из сумматоров 12 представляет собой разность измеренного и эталонного значений каждой переменной. Этот сигнал подается на оба входа соответствующего (первого множительного элемента 13, который осуществляет возведение в квадрат своего входного сигнала. Выходные сигналы первых множительных элементов 13 каждого узла подаются на входы первого сумматора 14 этого же узла, Таким образом, выходной сигнал первого сумматора 14 узла, относящегося к i-му классу, имеет смысл суммы квадратов расстояний в пространстве переменных системы от точки текущего наблюдения до точки 1-го класса с эталонными значениями измеряемых переменных 1- го класса,
Выходные сигналы первых сумматоров 14 всех р узлов в сочетаниях по 2 поступают на входы первых элементов сравнения 15, осуществляющих попарное сравнение выходных сигналов первых сумматоров 14. Выходные сигналы первых элементов сравнения 15, первые входы которых подключены к одному и тому же первому сумматору 14, подаются на входы элементов И 16. Каждый из первых элементов сравнения 15 срабатывает (формирует на выходе сигнал 1), если сигнал на его втором входе больше
чем сигнал на его первом входе, т.е., если квадрат расстояния в пространстве измеряемых переменных системы от точки текущего наблюдения до точки с эталонными
значениями класса (и соответствующего ему узла), соответствующего первому входу первого элемента сравнения 15, меньше, чем аналогичная величина для другого класса (и соответствующего ему узла), соответствую0 щего второму входу этого первого элемента сравнения 15. Таким образом, если на первый вход какого-либо первого элемента сравнения 15 поступает сигнал с выхода первого сумматора 1-го узла, а на второй
5 вход того же сумматора поступает сигнал с выхода первого сумматора j-ro узла, то этот первый элемент сравнения вырабатывает выходной сигнал 1 в том случае, когда наблюдение ближе к эталонному набору
0 значений переменных i-ro класса, чем к набору j-ro класса, т.е если сигнал на его первом входе меньше, чем на втором.
Сигналы с выходов первых элементов сравнения 15, первые входы которых соеди5 нены с выходом одного и того же первого сумматора 14 1-го узла, поступают на входы одного из элементов И 16. Если все входные сигналы элемента И 16 равны 1, то на его выходе также появляется сигнал 1. Это
0 означает, что точка текущего наблюдения в пространстве измеряемых переменных системы расположена ближе к точке с эталонными значениями класса I, чем ко всем остальным точкам с эталонными значения5 ми других классов. При этом на выходах других элементов И 16 будет сформирован сигнал О. Выходные сигналы всех элементов И 16 подаются на входы шифратора 17, на выходе которого формируется код класса
0 i с наименьшим расстоянием в пространстве измеряемых переменных системы от точ- ки текущего наблюдения до точки с эталонными значениями переменных i класса. В случае, если расстояния между точкой
5 текущего наблюдения и эталонными точками для двух классов равны и меньше расстояний между точкой текущего наблюдения и эталонными точками для всех других классов, на выходах всех элементов И 16 будет
0 сигнал О. Шифратор 17 выполнен на основе таблицы, занесенной в программируемую логическую матрицу или в программируемое ПЗУ, Случай равных минимальных расстояний относится при про5 ектировании системы к одному из классов. Конкретный вид таблицы шифратора 17 определяется на этапе проектирования системы.
Блок 6 определения оптимальных управляющих воздействий (см.фиг 3) работаных входов блока определения оптимальных управляющих воздействий, с выходов блока измерения показателей качества 4 (см.фиг. 1) поступают измеренные показатели качества системы.
На вторые входы вторых множительных элементов 19, которые являются входами задания блока 6 определения оптимальных управляющих воздействий, с выходов за- датчика режимов 11 (см.фиг. 1) поступают коэффициенты целевой функции. Эти коэффициенты зависят от специфики объекта уп- равления и выбираются на стадии проектирования системы управления для разных режимов работы
Вторые множительные элементы 19 (см.фиг. 3) осуществляют умножение показателей качества системы на соответствующие им коэффициенты целевой функции, значения произведений указанных величин С выходов вторых множительных элементов 19 поступают на входы третьего сумматора 20, который суммирует значения этих произведений. Таким образом вторые множительные элементы 19 и третий сумматор 20 осуществляют вычислительные значения целевой функции для конкретной совокупности значений показателей качества систе- мы (для текущего наблюдения) Это значение поступает на первый вход второго элемента сравнения 21 и на первый информационный вход запоминающего устройства 18.
На адресный вход запоминающего устройства 18, который является информационным входом блока б определения оптимальных управляющих воздействий, с выхода блока классификации наблюдений 5 поступает код класса, к которому относится текущее наблюдение. В соответствии с этим . кодом из запоминающего устройства 18 считывается и выдается на его первый информационный выход наилучшее достигнутое за предшествующий период наблюдений значение целевой функции данного класса, это значение поступает на второй вход второго элемента сравнения 21. Начальная матрица оптимальных управляющих воздействий по классам переменных и соответствующий вектор значений целевой функции строятся на этапе проектирования конкретной системы управления и заносятся в запоминающее устройство. По мере работы системы матрица обновляется путем записи в запоминающее устройство 18 лучших в смысле установленного критерия оптимальности управляющих воздействий. Одновременно в соответствии с кодом класса текущего наблюдения из запоминающего устройства 18 считываются и выдаются на его вторые информационные выходы значения управляемых переменных системы, соответствующие данному классу текущего наблюдения и значению целевой функции на первом вхо- 5 де запоминающего устройства 18. Указанные -значения управляемых переменных системы поступают на информационные входы второй группы элементов ЗАПРЕТ24 Второй элемент сравнения 21 осущест- 0 вляет сравнение значения целевой функции для текущего наблюдения (на первом входе) и наилучшею ранее достигнутого значения целевой функции класса, к которому относится текущее наблюдение (на втором вхо5 де). Если значение целевой функции текущего наблюдения лучше, чем наилучшее из ранее достигнутых значений целевой функции класса, к которому относится текущее наблюдение, то второй элемент сравне0 ния 21 формирует на своем выходе сигнал 1. Например, если целевая функция построена на минимизации отклонения показателей качества от заданных стандартом для технологического процесса, то лучшим
5 из двух значений является минимальное значение целевой функции.
Выходной сигнал второго элемента сравнения 21 подается на управляющие входы первой группы элементов ЗАПРЕТ 23
0 и через элемент 22 - инверсно - на управляющие входы второй группы элементов ЗАПРЕТ 24 и запоминающего устройства 18.
На информационные входы первой группы элементов ЗАПРЕТ 23, которые об5 разуют вторую группу информационных входов блока определения оптимальных управляющих воздействий, с выходов блока 3 измерения сигналов управляемых входоб поступают измеренные значения сигналов
0 управляемых входов объекта управления 1. Элементы ЗАПРЕТ 23 первой группы и элементы ЗАПРЕТ второй группы могут передавать на свои выходы значения сигналов оптимальных управляющих воздействий
5 Если на выходе второго элемента сравнения 21 сформирован сигнал 1, то открываются элементы ЗАПРЕТ 23, а элементы ЗАПРЕТ 24 закрываются. Если на выходе второго элемента 21 сформирован сигнал О, то от0 крываются элементы ЗАПРЕТ 24, а элементы ЗАПРЕТ 23 закрываются. Выходы элементов ЗАПРЕТ23 и ЗАПРЕТ24 подаются на входы группы элементов ИЛИ 25. Т.к. элементы первой 23 и второй 24 групп ЗА5 ПРЕТ не могут быть открыты одновременно, то на выходах элементов ИЛИ 25, которые являются выходами блока б определения оптимальных управляющих воздействий, появляются или сигналы управляемых входов объекта управления 1 с выхода блока 3
измерения сигналов управляемых входов (если целевая функция текущего наблюдения лучше, чем наилучшая из ранее достигнутых для данного класса), или считанный из запоминающего устройства 18 ранее запомненный набор сигналов управляемых входов объекта управления 1,соответствующий наилучшему ранее запомненному значению целевой функции.
С выходов элементов ЗАПРЕТ 23 пер- вой группы подаются сигналы как на входы элементов ИЛИ 25, так и на вторые информационные входы запоминающего устройства 18. Запись информации с этих информационных входов в запоминающее устройство 18 осуществляется по сигналу на управляющем входе запоминающего устройства 18 при переходе этого сигнала из состояния 1 в состояние О. Одновременно происходит запись в запоминающее уст- ройство 18 сигнала с его первого информационного входа - новое наилучшее значение целевой функции для данногб класса.
Запись новых значений целевой функ- ции и соответствующих ей новых значений лучших для этого класса управляющих воздействий осуществляется взамен устаревшей информации по прежнему адресу - в соответствии с номером класса текущего на- блюдения и кодом на информационном входе блока 6 определения оптимальных управляющих воздействий
Таким образом, в процессе функционирования системы в запоминающем устрой- стве 18 блока б определения оптимальных управляющих воздействий происходит постоянное накопление информации об объекте управления 1 и системе в целом, происходит постоянное улучшение качества управления, тем самым достигается цель изобретения - повышение качества управления технологическим процессом,
Повышение качества управления достигается:
-за счет учета влияния на процесс неизмеряемых входов объекта, например - параметров сырья, определяемых его технологической предисторией (режимами технологии на предыдущих в технологичё- ской цепочке агрегатах);
-за счет постоянной коррекции опти- мальных управляющих воздействий, которая осуществляется в блоке определения оптимальных управляющих воздействий;
-за счет заложенной в самой структуре системы безусловной достижимости оптимальной точки, формируемой в блоке опре- деления оптимальных управляющих воздействий для текущего состояния объекта управления, и для класса, определяемого в блоке классификации наблюдений;
- за счет исключения возможности выхода управляющих воздействий за пределы технологических ограничений выбором уп- равляющих воздействий в блоке формирования управляющих воздействий из множества допустимых управляющих воздействий.
Предлагаемая система может быть использована для адаптивного управления различными технологическими процессами и для различных объектов управления, например - в металлургии на непрерывном широкополосном стане горячей прокатки стальных полос, в нефтепереработке на установке каталитического крекинга и т.д.
Предлагаемая система может быть реализована на известных в автоматике датчиках, исполнительных механизмах, узлах и элементах.
Блок 2 (см.фиг. 1) измерения сигналов неуправляемых входов, блок 3 измерения сигналов управляемых входов, блок А измерения показателей качества реализуются на обычных датчиках технологических систем контроля и управления, преобразующих электрические и неэлектрические входные сигналы в стандартные электрические сигналы. Для объекта управления - непрерывного широкополосного стана горячей прокатки такими датчиками являются, например, измерители усилий серии ИУМ, рентгеновские измерители1 толщины полос, измерители ширины проката конструкции ВНИИМЕТМАШ. Датчики содержат средства обработки сигналов, или могут быть дополнены такими стандартными средствами. Например, современные рентгеновские измерители толщины имеют встроенные ЭВМ с программами для статических расчетов.
Блок 9 исполнительных механизмов может быть реализован на стандартных исполнительных механизмах в соответствии с типом объекта управления. Например, для непрерывного широкополосного стана горячей прокатки с двумя управляемыми входами - вертикальными и горизонтальными обжатиями заготовки -в качестве исполнительных механизмов могут быть использованы обычные электромеханические или гидронажимные устройства прокатного стана, например - беспоршневое гидронажимное устройство
Блок 5 классификации наблюдений, блок 6 определения оптимальных управляющих воздействий, блок 7 формирования корректирующих воздействий, блок 8 формирования управляющих воздействий, за- датчик классов 10 и задатчик режимов 11 могут быть реализованы на серийной электронно-вычислительной технике, например, ЭВМ Электроника-60 - 15 ВУМС-28 (5), или - на отдельных серийных электронных элементах.
Блок 7 формирования корректирующих воздействий может быть реализован, например, в виде таблицы коэффициентов, за- несенной в программируемую логическую матрицу или в постоянное запоминающее устройство, например, на микросхемах КР573РФ2, КР556РТ5,
При этом адресные входы микросхем являются входами блока 7 формирования корректирующих воздействий, выходы микросхем являются выходами этого блока.
Блок 8 формирования управляющих воздействий может быть реализован в виде набора множительных элементов, количество которых равно числу управляемых входов объекта управления, например, на умножителях серии КР1802.
Задатчик классов 120 может быть pea- лизован, например, на программных переключателях ПП6-11Т (ОЮЗ 602.160ТУ), или на запоминающих устройствах КР573РФ2, КР556РТ5. Такое запоминающее устройство должно хранить набор эталонных сигна- лов для управляемых входов, неуправляемых входов и показателей качества объекта управления для всех классов неизмеряемых входов. Определение этих эталонов осуществляется на стадии проек- тирования системы оптимального управления, например, по одному из известных алгоритмов кластерного анализа, например ISODATA, алгоритм Кинга и т.д Другой путь построения эталонных значений - построе- ние классов по результатам предварительных исследований сырья и объекта управления, Или по оценкам экспертов, и вычисление средних арифметических значений в каждом построенном классе,
Задатчик режимов 11 может быть реализован на программных переключателях, например, ПП6-11Т(ОЮ 602.160 ТУ) или на запоминающих устройствах КР556РТ5, КР573РФ2, хранящих набор коэффициентов при переменных критериях оптимальности. Определение этих коэффициентов осуществляется на этапах проектирований или опытной эксплуатации системы в соот- ветствии с требованиями к качеству продукции. Смена режимов и соответствующих им коэффициентов производится при изменении сортамента или типоразмера выпускаемой продукции
Шифратор 17 может быть сконструирован, например, на основе таблицы, занесенной в программируемую логическую матрицу или в программируемое постоянное запоминающее устройство, например, на микросхемах К573РФ2, КР556РТ4.
Запоминающее устройство 18 может быть реализовано, например, на микросхемах запоминающих устройств, таких, как К155РУ2, КР565РУ1А.
Первый 4, второй 12 и третий 20 сумматоры могут быть реализованы, например, на микросхемах сумматоров, таких, как К155ИМ2, К155ИМЗ. Инверсные входы сумматоров могут быть реализованы, например, инверторами К155ЛН1.
Первый 15 и второй 21 элементы сравнения могут быть реализованы, например, на сумматорах с прямым Vi инверсным входами, осуществляющих операцию вычитания кодов, выход знакового разряда сумматора является выходом элемента .сравнения. Такие сумматоры реализуются на обычных микросхемах сумматоров (К155ИМ2, К155ИМЗ) с инверсными входами на микросхемах К155ЛН1.
Первый 13 и второй 19 множительные элементы могут быть реализованы, например, на микросхемах умножителей серии КР1802.
Элемент И 16 может быть реализован, например, на микросхемах К155ЛИ5. Элемент НЕ 22 может быть реализован, например, на микросхемах К155ЛН1.
Элементы ЗАПРЕТ первой 23 и второй
24групп могут быть реализован, например, на микросхемах К155ЛИ1. Элементы ИЛИ
25могут быть реализованы, например, на микросхемах К155ЛЛ1.
Экономический эффект от внедрения предлагаемой системы образуется за счет повышения качества управления путем увеличения объема выпускаемой продукции, повышения качества продукции и снижения затрат на ее выпуск
Например, для непрерывного широкополосного стана горячей прокатки стальных полос при внедрении указанной системы возможно достижение годового экономиче ского эффекта за счет увеличения отгрузки по теоретическому весу:
Э ТВ(К2 - К1)Ц - (КА + КР)СИ - - 2000000(0.0513 - 0.05)100000 - (0.12 + 0.05) 100000 - 0.15 300000 200000 руб.;
где ТВ 2000000 - объем отгрузки по теоретическому весу, тонн;
К1 0,05, К2 0,0513 - коэффициенты отгрузки по теоретическому весу до и после внедрения системы;
Ц 100 - цена заданного металла, рубей за тонну:
КА 0.12, КР 0.05 - коэффициенты тчислений на амортизацию и текущий реонт;
КН 0.15 - нормативный коэффициент эффективности;
СР 300000, СИ 100000 - стоимость разработки и изготовления системы, рубей.
оля эффекта, приходящаяся на предлагаемую систему, составит 25%, или 50000 рублей в год.
Формула изобретения
Система адаптивного управления технологическим прбцессом, содержащая последовательно соединенные блок формирования корректирующих воздействий, блок формирования управляющих воз- действий и блок исполнительных механизмов, выходы которого подключены к входам блока измерения сигналов управляемых входов и к управляемым входам объекта управления, неуправлямые входы объекта управления соединены с входами блока измерения сигналов неуправляемых входов, выходы объекта управления соединены с входами блока измерения показателей качества,отличающаяся тем,что, с целью повышения качества управления объектов с неизмеряемыми входами, введены задатчик классов, задатчик режимов, блок определения оптимальных управляющих воздействий и блок классификации наблюдений, первая группа информационных входов которого соединена с выходами блока измерения сигналов управляемых входов, вторая группа информационных входов блока классификации наблюдений соедине- -на с выходами блока измерения сигналов неуправляемых входов, третья группа инормационных входов блока классификации наблюдений соединена с К выходами блока измерения показателей качества, информационный вход блока определения оп- тимальных управляющих воздействий соединен с выходом блока классификации1 -наблюдений, первая группа информационных входов - с выходами блока измерения показателей качества, вторая группа инфор- мационных входов - с выходами блока измерения сигналов управляемых входов, выход блока определения оптимальных управляющих воздействий подключен к входам блока формирования корректирующих воздействий и к группе входов блока форми- рования управляющих воздействий, выходы задатчика классов и задатчика режимов со- единены соответственно с входами задания блоха классификации наблюдений и блока определения оптимальных управляющих воздействий.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адаптивного управления технологическим процессом | 1983 |
|
SU1242911A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 2005 |
|
RU2313828C2 |
| Система идентификации колебаний присоединенного к объекту упругого элемента с дискретно изменяемой жесткостью | 1988 |
|
SU1543384A1 |
| Устройство для адаптивного управления технологическим процессом | 1988 |
|
SU1656495A1 |
| УСТРОЙСТВО ДЛЯ КЛАССИФИКАЦИИ МНОГОПАРАМЕТРИЧЕСКИХ ОБЪЕКТОВ | 1991 |
|
RU2049355C1 |
| СПОСОБ РАСПРЕДЕЛЕННОГО КОНТРОЛЯ И АДАПТИВНОГО УПРАВЛЕНИЯ МНОГОУРОВНЕВОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450335C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Устройство контроля | 1985 |
|
SU1291931A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2245837C1 |
Изобретение относится к системам управления технологическими процессами и может быть использовано для адаптивного управления технологическими процессами в условиях наличия неизмеряемых неуправляемых входов объекта, существенно влияющих на критерий управления. Целью изобретения является повышение качества управления. Указанная цель достигается тем, что в систему, содержащую объект управления, последовательно соединенные блок формирования корректирующих воздействий, блок формирования управляющих воздействий и блок исполнительных механизмов, а также блоки измерения показателей качества и сигналов управляемых и неуправляемых входов, введены блок классификации наблюдений, входы которого соединены с блоками измерения показателей качества, сигналов управляемых и неуправляемых входов и с задатчиком классов, и блок определения оптимальных управляющих воздействий, входы которого соединены с блоком классификации наблюдений, блоками измерения показателей качества и измерения сигналов управляемых входов и с задатчиком режимов, выход блока определения оптимальных управляющих воздействий соединен с входами блока формирования корректирующих воздействий и блока формирования управляющих воздействий.3 ил. (Л С
1
Фиг. 2
Фиг. 5
| Патент США № 4054780, кл | |||
| Способ получения мыла | 1920 |
|
SU364A1 |
| Устройство для адаптивного управления технологическим процессом | 1983 |
|
SU1242911A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
