о сл а чэ сл
Изобретение относится к адаптивным системам управления и может использоваться для адаптивного управления сложными многомерными объектами, например технологическими.
Цель изобретения - повышение точности и быстродействия.
На фиг. 1 приведена блок-схема устройства для адаптивного управления технологическим процессом; на фиг. 2 - блок-схема блока программного управления; на фиг. 3 - блок-схема блока анализа значений неуправляемых входов.
Устройство для адаптивного управления технологическим процессом содержит {фиг. 1) блок 1 измерения сигналов управляемых входов, объект 2 управления, блок 3 измерения сигналов неуправляемых входов, блок 4 определения величин приоритетов показателей качества, блок 5 формирования блокирующих сигналов, блок 6 выбора показателя качества, блок 7 измерения показателей качества, блок 8 определения величин управляющих воздействий, блок 9 формирования корректирующих воздействий, блок 10 формирования управляющих воздействий, блок 11 исполнительных механизмов, блок 12 анализа значений неуправляемых входов блок 13 включения первого режима работы устройства, первый 14 и второй 15 блоки переключения режимов работы устройства, блок 16 программного управления
Блок 16 программного управления содержит (фиг. 2) инвертор 17. таймер 18, первые элементы запрета 19, элементы 20 памяти текущих координат, первый распределитель 21 импульсов, вторые элементы запрета 22, первые зэдатчики 23 сигналов программного управления, второй распределитель 24 импульсоз. блоки 25 переход- ных функций, третий распределитель 26 импульсов, блоки 27 модулей переходных Функций.
Каждый блок 25 переходных функций содержит (фиг. 2) задатчики 28, элементы 29, 30 запретов, пороговые элементы 31, элементы 32 задержки.
Каждый блок 27 модулей переходных функций содержит (фиг. 2) элементы 33 запрета и задатчики 34.
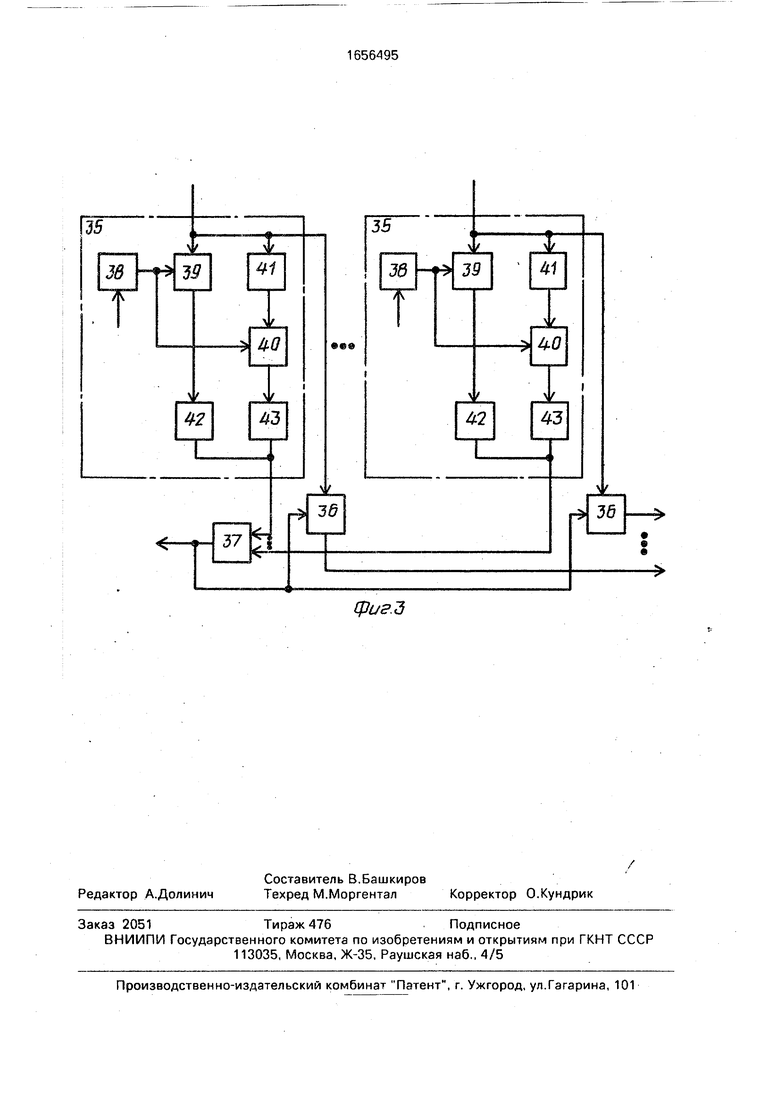
Блок 12 анализа значений неуправляемых вхчдов содержит (фиг. 3) бпоки 35 обнаружения отклонений.элементы 36 запрета, элемент 37 ИЛИ.
Каждый блок 35 содержит (фиг. 3) задат- чик 38, элементы 39, 40 сравнения, элемент НЕ 41, пороговые элементы 42 и 43.
Работа устройства осуществляется ь двух режимах; в режиме стохастического уп равления и в режиме программного управления. Переключение режимов осуществляется с помощью блока 3 измерения сигналов неуправляемых входов, блока 12 анализа значений неуправляемых входов, блока 13 включения первого режима работы устройства, первого 14 и второго 15 блоков переключения режимов работы устройства следующим образом. Блок 3 измерения сигналов неуправляемых входов передает на входы блока 12 анализа значений неуправляемых входов их значения X (Xi, Х2 .... Хп). В случае отклонения значения хотя бы одного из неуправляемых входов Хр, р 1,п от заданного порогового значения, блок 12 анализа значений неуправляемых входов на своем втором выходе вырабатывает сигнал, по которому входь1 блока 13 включения первого режима работы устройства соединяются с его выходами, первые входы первого блока 14 переключения режимов работы устройства соединяются с его первыми выходами, вторые входы второго блока 15 переключения режимов работы устройства соединяются с его выходами. Кроме того, на выходах блока 12 анализа значений неуправляемых входов появляются сигналы, содержащие значения неуправляемых входов объекта управления Хр. р 1 ,п. в результате чего устройство работает в режиме прототипа.
В случае не превышения значений сиг- нзлов неуправляемых входов Хр, р 1,п заданного порогового значения блок 12 анализа значений неуправляемых входов на своем управляющем выходе вырабатывает сигнал нулевого значения, который размыкает соединение первых входов блока 13 включения первого режима работы устройства с его выходами, соединяет первые входы первого блока 14 переключения режимов работы устройства с его вторыми выходами, первые входы второго блока 15 переключения режимов работы устройства с его выходами. Кроме того, по данному сигналу, поступи-вшему на второй вход, блок 16 программного управления начинает работу.
Режим программного управления заключается в выработке блоком 16 программного управления значений управляемых
входов объекта управления Y (yi, )
через заданные промежутки времени. При этом выработка значений управляемых входов объекта управления yt, I l.m осуществляется блоком 16 программного управления следующим образом Поступивший на вход инвертора 17 сигнал нулевого значения инвертируется им в сигнал единичного значения. Данный сигнал поступает на вторые вход-и первых элементов 19 запрета, которыесткрывэютср, и на элемен
ты 20 памяти, представляющие собой матрицу текущих состояний, заносятся исходные значения сигналов управляемых входов yi(t), i 1,m. Этот же сигнал с выхода инвертора 17 поступает на вход таймера 18, который начинает вырабатывать последовательность импульсов в заданные моменты времени ti, 12ts. Данные сигналы
поступают на вход первого распределителя 21 и распределяются соответственно на его
1-ый, 2-ойs-ый выход. Сигнал с К-го,
К 1,s выхода первого распределителя 21 поступает на второй вход К-ro из вторых элементов 22 запрета. В результате сигнал qk(tk) с К-го первого задатчика 23, которые в совокупности представляют собой программу управления, поступает на вход второго распределителя 24. Распределитель 24 вырабатывает сигнал на своем qk-ом выходе. Данный сигнал поступает на вторые входы элементов запрета 29 qk-го блока 25 переходных функций.В результате значения сигналов dit.i 1,m, хранящихся на за- датчиках 28 qk-го блока 25 переходных функций и определяющих номер переходной функции 1,В, поступают на входы пороговых элементов 31 qk-го блока переходных функций 25. Если значение сигнала, хранящееся на i-ом задатчике 28 dn 0, то l-ый пороговый элемент 31 вырабатывает сигнал, поступающий на l-ый из элементов 30 запрета qk-го из блоков переходных функций 25. В результате сигналы со значениями di поступают на i-ые элементы 32 задержки qk-го из блоков 25 переходных функций. Данные элементы 32 задержки настроены таким образом, что сигналы со значением di поступают на выход блока 25 переходных функций последовательно от 1- го к m-му. Эти сигналы, поступающие на вход распределителя импульсов 26. появляются на его 1-ом выходе и поступают на вход 1-го блока 27 модулей переходных функций. Данный сигнал поступает на вторые входы элементов 33 запрета, в результате чего сигналы с задатчиков 34, представляющих собой в совокупности модуль переходной функции, со значением yi, I 1 ,m поступают на элементы 20 памяти и далее на выходы блока 16 программного управления.
Работа блока 12 анализа значений неуправляемых входов осуществляется следующим образом. Значение сигнала неуправляемого входа XD поступает на вход соответствующего блока 35 обнаружения отклонения и первый вход соответствующего элемента 36 запрета, С выхода задатчика 38 на первые входы первого и второго элементов 39 и 40 сравнения выставляется пороговое значение неуправляемого входа с
отрицательным знаком Хрп. Если Хр 0. то на первом элементе 39 сравнения вырабатывается сигнал (Хр - Хр). Если (Хр - Хрп) 0. что свидетельствует о превышении порога.
то первый пороговый элемент 42 вырабатывает сигнал, поступающий на выход блока 35 обнаружения отклонений. Хр 0. то элемент НЕ 41 обращает это э начение в значение Хр° 0, и второй элемент сравнения
вырабатывает сигнал (Хр° - Хрп). Если (Хр° - -Хрп) 0, что свидетельствует о превышении порога, то второй пороговый элемент 43 вырабатывает сигнал, поступающий на выход блока 35 обнаружения отклонений. При других вариантах на выходе блока 35 обнаружения отклонений сигнал не вырабатывается. Если на выходе хотя бы одного блока 35 обнаружения отклонений появляется сигнал, элемент ИЛИ 37 вырабатывает единичный
сигнал, поступающий на второй выход блока анализа значений неуправляемых входов 12 и на вторые входы элементов 36 запрета. В результате на первых выходах блоков анализа значений неуправляемых входов 12 появляются сигналы со значениями Хр, р 1 ,п.
Технико-экономическая эффективность
предлагаемого устройства образуется за
счет повышения точности и быстродействия
устройства в период детерминированного
управления. Это дает повышение технико- экономической эффективности предлагаемого устройства на 18-23% по сравнению с прототипом, так как точность и быстродействие функционирования детерминированной
модели существенно выше вероятностной, а периоды детерминированного управления для базового класса объектов составляют порядка 60-70% от всего периода функционирования устройства.
Формула изобретения
1. Устройство для адаптивного управления технологическим процессом, содержащее блок исполнительных механизмов, соединенный первым входом с-входом устройства, а выходом - с входом блока измерения сигналов управляемых входов и через объект управления - с входом блока измерения показателей качества, блок измерения сигналов неуправляемых входов, подключенный группой входов к группе неуправляемых входов объекта управления, блоки определения величин приоритетов показателей качества, соединенные входами между собой и с информационными входами блока определения величин управляющих воздействий, а выходами через блок формирования блокирующих сигналов - с входами управления блокировки блока выбора показателей качества, блока формирования корректирующих воздействий и блока определения величин управляющих воздействий, который подключен первым выходом к первому информационному входу блока формирования корректирующих воздействий, соединенного вторым информационным входом с информационным входом блока формирования блокирующих сигналов и с выходом блока выбора показателей качества, а выходом -с первым информационным входом блока формирования управляющих воздействий, второй информационный вход которого подключен к второму информационному выходу блока определения величин управляющих воздействий, отличающее- с я тем, что, с целью повышения точности и быстродействия, введены блок анализа значений неуправляемых входов, блок включения первого режима работы, два блока переключения режимов работы устройства, блок программного управления, управляющий выход блока анализа значений неуправляемых входов соединен с входами управления переключением режимов работы блока включения первого режима работы, первого и второго блоков переключения режимов работы и блока программного управления, выход блока измерения сигналов неуправляемых входов подключен к информационному входу блока анализа значений неуправляемых входов, соединенного выходом с входами блоков определения величин приоритетов показателей качества, выход блока измерения сигналов управляемых входов подключен к информационному входу первого блока переключения режимов работы устройства, соединенного первым и вторым выходами соответственно с информационным входом блока программного управления и вторым информационным входом блока определения величин управляющих воздействий, выход блока программного управления подключен к первому информационному входу второго блока переключения режимов работы устройства,
соединенного вторым информационным входом с выходом блока формирования управляющих воздействий, а выходом - с зторым входом блока исполнительных механизмов.
2. Устройство по п. 1, отличающее- с я тем, что блок программного управления содержит инвертор, таймер, три распределителя импульсов, две группы элементов запрета, группу элементов памяти текущих
координат, группу задатчиков сигналов программного управления, группу блоков переходных функций и группу блоков модулей переходных функций, выход каждого элемента запрета первой группы соединен с
соответствующими выходами блоков модулей переходных функций и с соответствующими элементами памяти текущих координат, выходы которых образуют выход блока программного управления,
первые входы первой группы элементов запрета образуют информационный вход блока программного управления, вход управления переключением режимов работы которого через инвертор подключен к вторым входам
элементов запрета первой группы и через таймер - к входу первого распределителя импульсов, соединенного выходом с первыми входами элементов запрета второй группы, вторые входы которых подключены к
выходам задатчиков сигналов программного управления, а выходы - к входу второго распределителя импульсов, соединенного выходами с входами блоков переходных функций, выходы которых подключены к
входу третьего распределителя импульсов, соединенного выходами с входами блоков модулей переходных функций.
-
фиг.З

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адаптивного управления технологическим процессом | 1983 |
|
SU1242911A1 |
| Система адаптивного управления технологическим процессом | 1989 |
|
SU1781670A1 |
| Способ определения прямых показателей качества регулирования промышленных автоматических систем | 1988 |
|
SU1580323A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1084852A1 |
| Устройство для контроля электрических цепей | 1983 |
|
SU1112322A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ДВУХДИАПАЗОННОЙ КОРОБКОЙ ПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2424927C1 |
| Устройство для автоматического измерения параметров колебательных контуров | 1986 |
|
SU1406525A1 |
| Адаптивная система управления | 1988 |
|
SU1575152A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления | 1987 |
|
SU1464139A1 |

Изобретение относится к адаптивным системам управления и может использоваться для адаптивного управления сложными многомерными объектами, например технологическими. Цель изобретения - повышение точности и быстродействия. Устройство для адаптивного управления технологическим процессом содержит блох 1 измерения сигналов управляемых входов, обьект управления 2, блок 3 измерения сигналов неуправляемых входов, блоки 4 определения величин приоритетов показателей качества, блок 5 формирования блокирующих сигналов, блок 6 выбора показателя качества, блок 7 измерения показателей качества, блок 8 определения величин управляющих воздействий, блок 9 формирования корректирующих воздействий, блок 10 формирования управляющих воздействий, блок 11 исполнительных механизмов, блок 12 анализа значений неуправляемых входов, блок 13 включения первого режима работы, первый 14 и второй 15 блоки переключения режимов работы устройства, блок 16 программного управления. Цель изобретения достигается за счет введения блоков 12-16. 1 з. п. ф-лы, 3 ил. сл с
| Устройство для адаптивного управления технологическим процессом | 1983 |
|
SU1242911A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
