J1569383
Изобретение относится к автомати- ческому управлению водораспределением на сельскохозяйственных оросительных каналах, в частности к автоматизации водозабора и вододеления в мелиорации.
Цель изобретения - повышение надежности и быстродействия регулирования ( уровня воды на участке ороситель- JQ ногр.канала
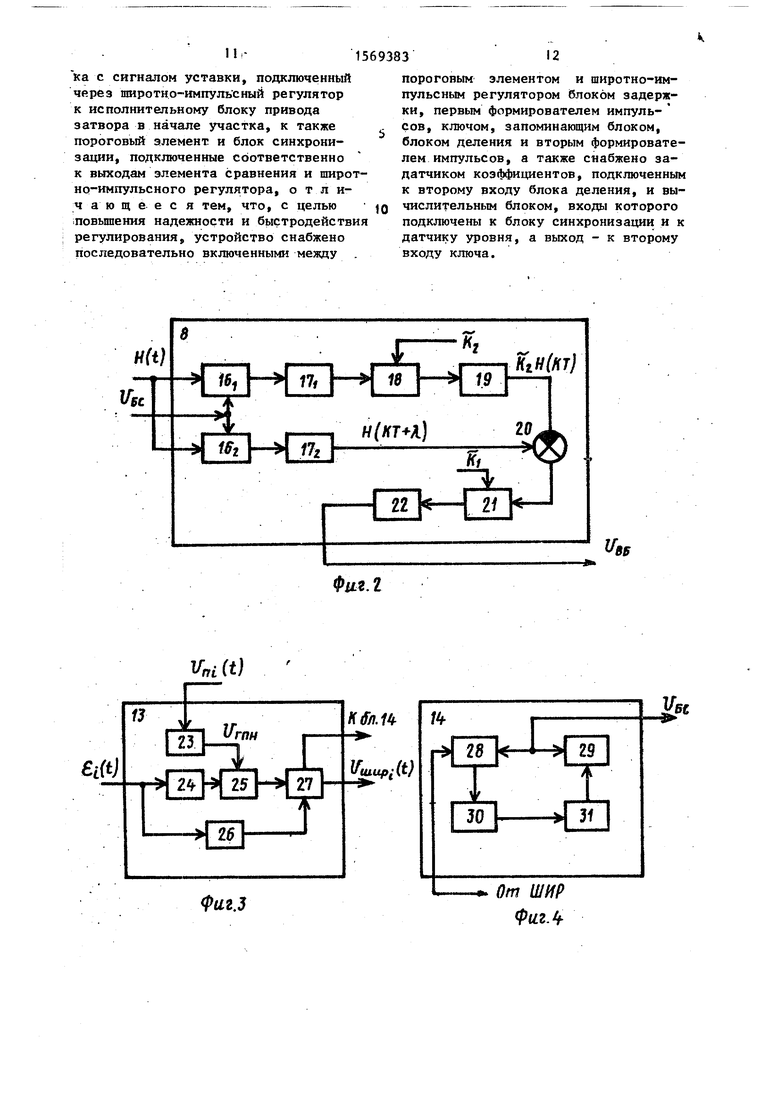
На фиг.1 показана функциональная схема устройства регулирования уровня воды на участке оросительного канала; на фиг. 2 - схема вычислительного блока; на фиг. 3 - схема широтно-импульсного регулятора; на фиг. 4 - схема блока синхронизации; на фиг. 5 - графики входных и выходных сигналов отдельных блоков устройства.
Устройство для регулирования уровня воды (фиг. 1) содержит затворы 1 начала и конца участка канала, датжимах работы участка канала коэффициент передачи системы (Ке), равный произведению коэффициента усиления объекта (К0) на коэффициент усиления регулятора (К), должен оставаться постоянным
Кс - К0
Кр const. (1)
Коэффициент усиления объекта представляет собой отношение выходной величины объекта к входной в установившемся состоянии
к - ЛН
КРТо
(2)
5
о &а где Д Н - приращение уровня воды в
участке канала;
йа - приращение величины открытия затвора.
Для выполнения условия (1) необ- 20 ходимо корректировать коэффициент регулятора Кр (t) в зависимости от изменений коэффициента усиления участка канала К 0 (t). Так как уровень
чик 2 уровня конца участка, элемент 3 ,, в начале и кон«е канала и расход сравнения, пороговый элемент 4, пер- Э чеРез гидротехническое сооружение вый элемент 5 задержки, первый фор- взаимосвязаны, то коэффициент усиления К0 и уровень воды на участке (являются функциями расхода Q воды через сооружение К0 f(Q) 30 и Н f(Q).
Учитывая, что при изменении режи- мов работы участка канала его коэффициент усиления изменяется в широком
40
мирователь 6 импульсов, ключ 7, вычислительный блок 8,запоминающее устройство 9, задатчик 10 коэффициентов, первый блок 11 деления, второй формирователь 12 импульсов,широтно- импульсный регулятор 13, блок 14 синхронизации, исполнительный блок 15.
Вычислительный блок 8 (фиг. 1) содержит импульсные элементы 16, , 16, фиксаторы 17, 7а нулевого порядка, блок 18 умножения, элемент 19 задержки, сумматср 20, второй блок 21 деления и первый блок 22 выделения модуля.
Широтно-импульсный регулятор 13 (фиг. 3) содержит генератор 23 пилообразного напряжения, второй блок 24 выделения модуля, компаратор 25, релейный элемент 26 и третий формирователь 27 импульсов.
Блок 14 синхронизации (фиг. 4) содержит фазовый детектор 28, задающий генератор 29, блок 30 усреднения напряжения и устройство 31 управления.
Устройство для регулирования уровня воды на участке оросительного канала работает следующим образом.
При изменении режимов работы участ-§5 ка канала его коэффициент усиления (коэффициент передачи) значительно изменяется. Для достижения оптимальных переходных процессов во всех редиапазоне к0мйи 6Ke(t) к0макс, 35 представим динамику участка канала в
m М (t)
о dt
45
+ 4(t) K0(t U (t -t) ,
(3)
где TO - постоянная времени участка канала;
U (t) - управляющее воздействие; $ - временное запаздывание
в участке канала. Для управления уровнем воды в участке канала применяется широтно- импульсный регулятор 7. Широтно-импульсный закон регулирования может быть представлен в виде
50
U
ЫИМг
(t)
М sign Е( (t) при КТ t Ј КГ + 9
к «
(4)
О при КТ +6KctЈ КТ + Т, где Т - период повторения управляющих импульсов;
QK - длительность управляющих импульсов в к-м периоде; М - амплитуда управляющих импульсов (Н const) .
жимах работы участка канала коэффициент передачи системы (Ке), равный произведению коэффициента усиления объекта (К0) на коэффициент усиления регулятора (К), должен оставаться постоянным
Кс - К0
Кр const. (1)
Коэффициент усиления объекта представляет собой отношение выходной величины объекта к входной в установившемся состоянии
к - ЛН
КРТо
(2)
о &а где Д Н - приращение уровня воды в
участке канала;
йа - приращение величины открытия затвора.
Для выполнения условия (1) необ- ходимо корректировать коэффициент регулятора Кр (t) в зависимости от изменений коэффициента усиления участ
диапазоне к0мйи 6Ke(t) к0макс, представим динамику участка канала в
m М (t)
о dt
+ 4(t) K0(t U (t -t) ,
(3)
где TO - постоянная времени участка канала;
U (t) - управляющее воздействие; $ - временное запаздывание
в участке канала. Для управления уровнем воды в участке канала применяется широтно- импульсный регулятор 7. Широтно-импульсный закон регулирования может быть представлен в виде
5
0
U
ЫИМг
(t)
М sign Е( (t) при КТ t Ј КГ + 9
к «
(4)
О при КТ +6KctЈ КТ + Т, где Т - период повторения управляющих импульсов;
QK - длительность управляющих импульсов в к-м периоде; М - амплитуда управляющих импульсов (Н const) .
Длительность управляющих импульсов широтно-импульсного регулятора 7 зависит от сигнала рассогласования, Ј;(t), а период повторения управляющих импульсов выбирается в виде , Т Ј/г, где г - целое положительное число.,
При равенстве значений уровня и задания в конце у частка сигнал рассогласования E;(t) равен нулю, при этом на исполнительный блок 15 не поступает никакой сигнал затвор 1 начала участ ка не перемещается.
При увеличении уровня воды в конце участка изменяется выходной сигнал датчика 2 уровня, который, поступая в элемент 3 сравнения и срав-. ниваясь в нем с сигналом задания уров,
569383
K0(t)
где К,
-т Я
и
Н(КТ + Ъ) - KjMCKT) ... Р&1 (5)
10
15
„ (™Л) к, J e -Hdt.
кт
Этот алгоритм может быть реализован или микроЭВМ, или описанным ниже вычислительным блоком 8, настроенным на дискретных или аналоговых элементах. При этом импульсные элементы 16 , 1&Ј работают синхронно с импульсным элементом широтно-импульсного регулятора 13 .Фиксаторы 1 7, , 1 72 нулевого порядка преобразуют выходные сигналы импульсных элементов 16 «, 1б4 в последовательность прямоугольных импульсов длительности Т, причем блок 5 задержки и элемент 19 задержки имеют одина
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования уровня воды на участке канала | 1986 |
|
SU1418407A1 |
| Система регулирования уровня воды на канале | 1990 |
|
SU1837263A1 |
| Устройство для регулирования уровня воды на участке канала | 1990 |
|
SU1781674A1 |
| Устройство для регулирования уровня воды в канале | 1986 |
|
SU1348788A1 |
| Адаптивный импульсный регулятор для нестационарных объектов с запаздыванием | 1981 |
|
SU993207A1 |
| Регулятор напряжения с многозонной импульсной модуляцией | 1982 |
|
SU1022129A1 |
| Система регулирования расходов на участках канала с головной насосной станцией | 1984 |
|
SU1298303A1 |
| Система регулирования уровня воды в бьефе оросительного канала | 1985 |
|
SU1357928A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1700738A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
Изобретение относится к автоматизации управления водораспределением на оросительных каналах мелиоративных систем. Цель изобретения - повышение надежности и быстродействия регулирования уровня воды на участке оросительного канала. Устройство для регулирования уровня воды на участке канала содержит затворы 1 в начале и конце участка, датчик 2 уровня воды конца участка, выход которого соединен с первым входом элемента сравнения. Исполнительный блок 15 связан с затвором 1 в начале участка. Устройство содержит также последовательно соединенные пороговый элемент 4, блок задержки 5, первый формирователь импульсов 6, ключ 7, запоминающее устройство 9, блок 11 деления, второй формирователь импульсов 12, широтно-импульсный регулятор 13. Синхронизация работы устройства осуществляется блоком 14 синхронизации, а основные вычисления для поддержания постоянным коэффициента усиления Кс системы объект - регулятор - вычислительным блоком 8. Последний вычисляет коэффициент усиления участка канала Ко для расчета требуемого коэффициента усиления регулятора Кр в блок 11 деления. Определение требуемого коэффициента усиления регулятора Кр осуществляется по формуле Кр=Кс/Ко, где Кс - заданный блоком 10 задания коэффициент усиления системы объект (участок канала) - регулятор (устройство управления). Применение устройства позволяет значительно уменьшить непроизводительные сбросы оросительной воды и подмывание дамб каналов. 5 ил.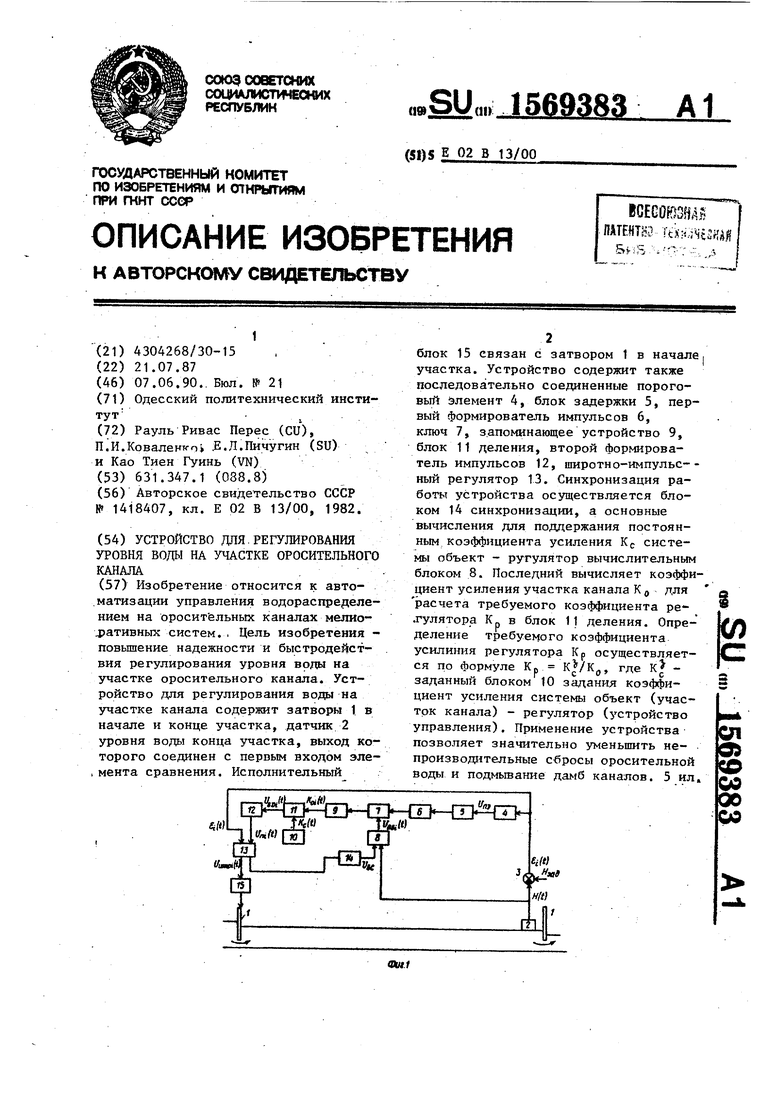
25
ня в конце участка, приводит к появле- 2Q ковое время задержки нию на выходе элемента 3 сравнения сигнала рассогласования Ј;(t) , который поступает на второй вход широтно- импулъсного регулятора 13. Последний по сигналу рассогласования 5; (t), формирует последовательность управляющих импульсов U. (t) с длительностью и знг:сом, пропорциональными сигналу Ј; (t). При этом на выходе исполнительного блока 15 появляется сигнал на опускание затвора 1 начала участка для подачи уменьшенного расхода воды в участок канала.
Идентификация коэффи ния участка канала прои дующим образом.
При превышении сигна сования Ј;(0 заданного уровня 6пна выходе поро та 4 появляется сигнал 1 поступает на вход герво задержки. Спустя время,
30 на выходе первого задержки появляется сигн формирователь 6 импульсо вает сигнал, открывающий Выходной сигнал К0; (t) в ного блока 8, полученный му 5, проходит через отк а затем поступает в запо устройство 9. В результа напряжение запоминающего становится равным новому KQ;(t) коэффициента усил ка канала.
ч(огда сигнал рассогласования с некоторого момента времени t
вытает пороговый уговень
е„
порогового элемента 4 т.е. |6(t)l 16nL что может быть вызвано изменением коэффициента усиления К0 участка канала, устройство проводит идентификацию коэффициента усиления объекта, при этом длительность (9К управляющих импульсов широтно-импульсного регулятора 13 становится больше некото- рой заранее заданной временной постоянной величины А, т.е. 0 Д , для чего Јп выбирают такой, что Ъ « Т.
Для идентификации коэффициента усиления К (t) участка канала с
момента времени
t/i
fr
в каждом
интервале дискретности имеются значения уровня воды в участке канала в момент времени t КТ и t КТ Д- . Следовательно, в каждом периоде величины Н(КТ) и Н(КТ + fl) определены и из уравнения (3) получается коэффициент усиления участка канала:
25
е- 2Q ковое время задержки -
Идентификация коэффициента усиления участка канала происходит следующим образом.
При превышении сигналом рассогласования Ј;(0 заданного порогового уровня 6пна выходе порогового элемента 4 появляется сигнал 1ГПЭ, который поступает на вход гервого элемента 5 задержки. Спустя время, равное
30 на выходе первого элемента 5 задержки появляется сигнал. При этом формирователь 6 импульсов вырабатывает сигнал, открывающий ключ 7. Выходной сигнал К0; (t) вычислительного блока 8, полученный по алгоритму 5, проходит через открытый ключ 7, а затем поступает в запоминающее устройство 9. В результате выходное напряжение запоминающего устройства 9 становится равным новому значению KQ;(t) коэффициента усиления участка канала.
Если сигнал рассогласования Ј, (t) меньше заданного порогового уровня Ј , то выходной сигнал порогового элемента 4 отсутствует, ключ 7 закрыт и выходное напряжение запоминающего устройства 9 остается постоянным. Синхронизация работы устройства осуществляется блоком 14, который работает следующим образом.
35
40
45
50
Выходной сигнал импульсного элемента широтно-импульсного регулятора 13 поступает на первый вход фа- 55 зового детектора 28, на второй вход детектора поступают сигналы от заданного генератора 29. Если частота импульсов задающего генератора 29 I отличается от частоты поступающих
импульсов импульсного элемента ши- ротно-импульсного регулятора 13, то на выходе фазового детектора 28 появляются импульсы рассогласования,, которые указывают направление РИ величину рассогласования. Блок 30 усреднения напряжения усредняет выходные импульсы фазового детектора 28 с целью получения управляющего напря- жения и кратковременного запоминания напряжения рассогласования. Устройство 31 управления использует сиг-, налы блока 30 усреднения для воздействия на частоту задающего генера тора 29, при этом с выхода задаюде- го генератора 29 снимаются синхронные и синфазные импульсы с входными импульсами, которые поступают на первый вход вычислительного блока 8 и обеспечивают синхронную работу импульсных элементов 1б(4, 1ба с импульсным элементом широтно-импульс- ного регулятора 13.
Коррекция коэффициента усиления K,,;(t) широтно-импульсяого регулятора 13 осуществляется блоком 11 соглано условию (1). Алгоритм функционирования первого блока 11 деления
следующий:
и (д
аи
КС (t) - v .м (6)
1W Р
к
01
где U (t) - i-й выходной сигнал
первого блока 11 деле нйя 35
К - выходной сигнал задатчика 10 коэрффициентов. После определения коэффициента усилия К р,1 (t) широтно-импульсного регулятора 13, соответствующего ново- до му режиму работы участка канала, второй формирователь 12 импульсов формирует последовательность прямоу- гольных импульсов U гй длительностью
пропорциональной величине нового коэф-45 лятора 13, На выходе порогового фициента усиления широтно-импульсного регулятора 13. Указанные импульсы поступают на вход генератора 23 пилообразного напряжения широтно-импульсного регулятора 13. При 5о этом длительность рабочего хода импульсов генератора 23 пилообразного напряжения определяется длительностью выходных прямоугольных импульсов
В начальном периоде (от 0 до коэффициент усиления участка ка является постоянным и поэтому с рассогласования f|(t} не превыш порогового уровня бп порогового ка 4, контур самонастройки регу ра 13 отключен. Сигнал рассогла ния 6; (t) поступает на второй регулятора 13. В компараторе 25 гулятора 13 сравниваются выходн сигнал (t) генератора 23 п образного напряжения и сигнал р гласования 6, (t) . В результате выходе регулятора 13 получают и пульсы управления ,p (t) длит ностью пропорциональной сигналу согласования 6(t). Так как в с ме управления имеется временное паздывание С, регулятор 13 выда импульсы управления, спустя вре запаздывания с/.
В интервале времени (9Т, ЮТ момент ti сигнал рассогласовани gz(t) превышает пороговое значе уровня б, что может быть вызва изменением коэффициента усилени участка канала. При этом включа в работу контур самонастройки р
элемента 4 в момент времени t2 ляется сигнал U nJ (t) , который п пает на вход первого элемента 5 держки и спустя время, равное ( Ј + Д) , на его выходе возникае сигнал W т.е. выходной си первого элемента 5 задержки появляется в момент времени t tt н-С + Д, где А - заранее данная времен гая постоянная вели на. При этом первый формировател импульсов вырабатывает сигнал U который открывает ключ 7. Вычисл
второгоформирователя 12 импульсов Таким образом на втором выходе широтно-импульсного регулятора П получают последовательность прямо угольных импульсов длительностью
9;
Q c
5 0
0
35
о
пропорциональной новому коэффициенту усиления регулятора
0; - f(K(t) , f;(t)) , (7)
При одном и том же сигнале рассогласования на выходе широтно-импульсного регулятора 13 можно, получить последовательности прямоугольных импульсов разной длительности, определяемой коэффициентом усиления Kpj(t) широтно-импульсного регулятора 13. Чем больше коэффициент усиления регулятора, тем больше длительность его выходных испульсов.
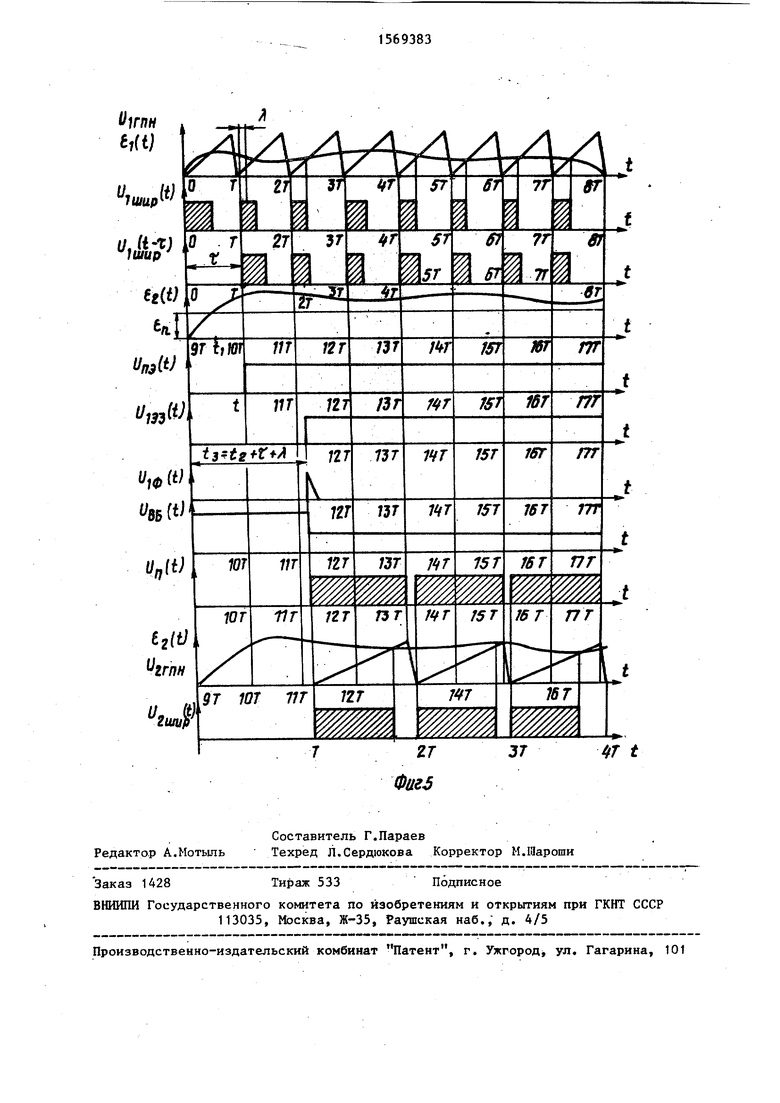
На фиг, 5 представлены диаграммы, поясняющие работу системы.
В начальном периоде (от 0 до 8 Т) коэффициент усиления участка канала является постоянным и поэтому сигнал рассогласования f|(t} не превышает порогового уровня бп порогового блока 4, контур самонастройки регулятора 13 отключен. Сигнал рассогласования 6; (t) поступает на второй вход регулятора 13. В компараторе 25 регулятора 13 сравниваются выходной сигнал (t) генератора 23 пилообразного напряжения и сигнал рассогласования 6, (t) . В результате на выходе регулятора 13 получают импульсы управления ,p (t) длительностью пропорциональной сигналу рассогласования 6(t). Так как в системе управления имеется временное запаздывание С, регулятор 13 выдает импульсы управления, спустя время запаздывания с/.
В интервале времени (9Т, ЮТ) в момент ti сигнал рассогласования gz(t) превышает пороговое значение уровня б, что может быть вызвано изменением коэффициента усиления К0 участка канала. При этом включается в работу контур самонастройки регулятора 13, На выходе порогового
элемента 4 в момент времени t2 появляется сигнал U nJ (t) , который поступает на вход первого элемента 5 задержки и спустя время, равное ( Ј + Д) , на его выходе возникает сигнал W т.е. выходной сигнал первого элемента 5 задержки ($ появляется в момент времени t tt н-С + Д, где А - заранее заданная времен гая постоянная величина. При этом первый формирователь- 6 импульсов вырабатывает сигнал U1tn , который открывает ключ 7. Вычисли(5)
тельный опок
по алгоритму
определяет новое значение коэффициента усиления K0(t) участка канала, при этом через открытый ключ 7 проходит выходной сигнал U ве (д вычислительного блока 8, пропорциональный новому значению коэффициента усиления участка канала, а затем поступает в запоминающее устройство 9. В результате выходное напряжение запоминающего устройства 9 становится равным новому значению коэффициента усиления канала K0(t) .
Для выполнения условия K.(t) B
K0(t)
Kp(t)
необходимо корректировать эначе ние коэффициента Kn(t) усиления регулятора 13. Первый блок 11 деления, работающий по алгоритму .(6), определяет новое значение коэффициен-
15
импульсного элемента широтно-им- пульсного регулятора 13 и выходной сигнал задающего.генератора 29. Ес ли частота импульсов задающего ген ратора 29 отличается от частоты по тупающих импульсов импульсного эле iмента шнротно-импульсного регулято ра 13, то на выходе фазового дете тора 28 появляются импульсы рассог сования, которые указывают направл ние и величину рассогласования. Блок 30 усредняет выходные импульсы фазового детектора 28 с целью получения управляющего напряжения и кратковременного запоминания напряж ния рассогласования. Устройство 31 управления использует сигналы блока .30 усреднения для воздействия
та Kp(t) регулятора 13. Второй форми- 2Q на чатоту задающего генератора 29,
рователь 12 импульсов формирует последовательность прямоугольных импульсов U(t) длительностью пропорциональной величине нового коэффициента .усиления регулятора 13. При этом длительность ,25 рабочего хода импульсов U гпн(& генератора 23 пилообразного напряжения определяется длительностью выходных прямоугольных импульсов U n (t) второго формирователя 12 импульсов. В о компараторе 25 регулятора 13 сравниваются сигнал рассогласования f2(t) и выходные импульсы U 2ГПН (t) генератора 23 пилообразного напряжения.
при этом с выхода задающего генератора 29 снимаются синхронные и синфазные импульсы с входными импульса ми, которые поступают на первый вход вычислительного блока 8 и обеспечивают синхронную работу импульсных элементов 164, 1бй с импульсным элементов широтно-импульс- ного регулятора 13. Для работы фазового детектора 28 не нужен блок привязки с задающим генератором 29. Таким образом, предлагаемая система регулирования уровня воды на участке оросительного канала осуществляет идентификацию текущего значения переменного коэффициента усиления K0;(t) участка канала и на основании результата идентификации перестраивает коэффициент усиления К р (t) широтно-импульсного регулятора до оптимальных значений, соответствующий новому режиму работы участка канала. При этом идентификация производится в режиме нормальной работы системы без применения пробного сигнала.
Таким образом, на втором выходе широтно-импульсного регулятора 13 получают последовательность прямоугольных импульсов U 2 ш„р (t) длительностью, пропорциональной новому коэффициенту усиления Kn(t) регулятора 13.
Kp(t) Функции импульсных элементов 16,
1бй иЛиксаторов 17, , 172,нулевого поряд следующие: импульсные элементы 16,
16 преобразуют непрерывный но времени выходной сигнал H(t) датчика 2 уровня конца участка канала в дискретный сигнал, при этом их выходной сигнал представляет собой после- довательн,,сть импульсов. Фиксато- 17,, 170 нулевого порядка
ры i / , i 4 преобразуют входные импульсные сигналы в последовательность прямоугольных импульсов длительностью Т.
Фазовый детектор 28 сравнивает два выходных сигнала и на его выходе формирует сигнал ошибки, пропорциональный разности фаз входных сигналов. В данном случае фазовый детек ,тор 28 сравнивает выходной сигнал
5
импульсного элемента широтно-им- пульсного регулятора 13 и выходной сигнал задающего.генератора 29. Если частота импульсов задающего генератора 29 отличается от частоты поступающих импульсов импульсного эле- iмента шнротно-импульсного регулятора 13, то на выходе фазового детектора 28 появляются импульсы рассогласования, которые указывают направление и величину рассогласования. Блок 30 усредняет выходные импульсы фазового детектора 28 с целью получения управляющего напряжения и кратковременного запоминания напряжения рассогласования. Устройство 31 управления использует сигналы блока .30 усреднения для воздействия
при этом с выхода задающего генератора 29 снимаются синхронные и синфазные импульсы с входными импульсами, которые поступают на первый вход вычислительного блока 8 и обеспечивают синхронную работу импульсных элементов 164, 1бй с импульсным элементов широтно-импульс- ного регулятора 13. Для работы фазового детектора 28 не нужен блок привязки с задающим генератором 29. Таким образом, предлагаемая система регулирования уровня воды на участке оросительного канала осуществляет идентификацию текущего значения переменного коэффициента усиления K0;(t) участка канала и на основании результата идентификации перестраивает коэффициент усиления К р (t) широтно-импульсного регулятора до оптимальных значений, соответствующий новому режиму работы участка канала. При этом идентификация производится в режиме нормальной работы системы без применения пробного сигнала.
Применение предлагаемого устройства позволяет значительно повысить точность, надежность и быстродействие регулирования и при этом уменьшить непроизводительные сбросы оросительной воды и подмывание дамб каналов. Формула изобретения
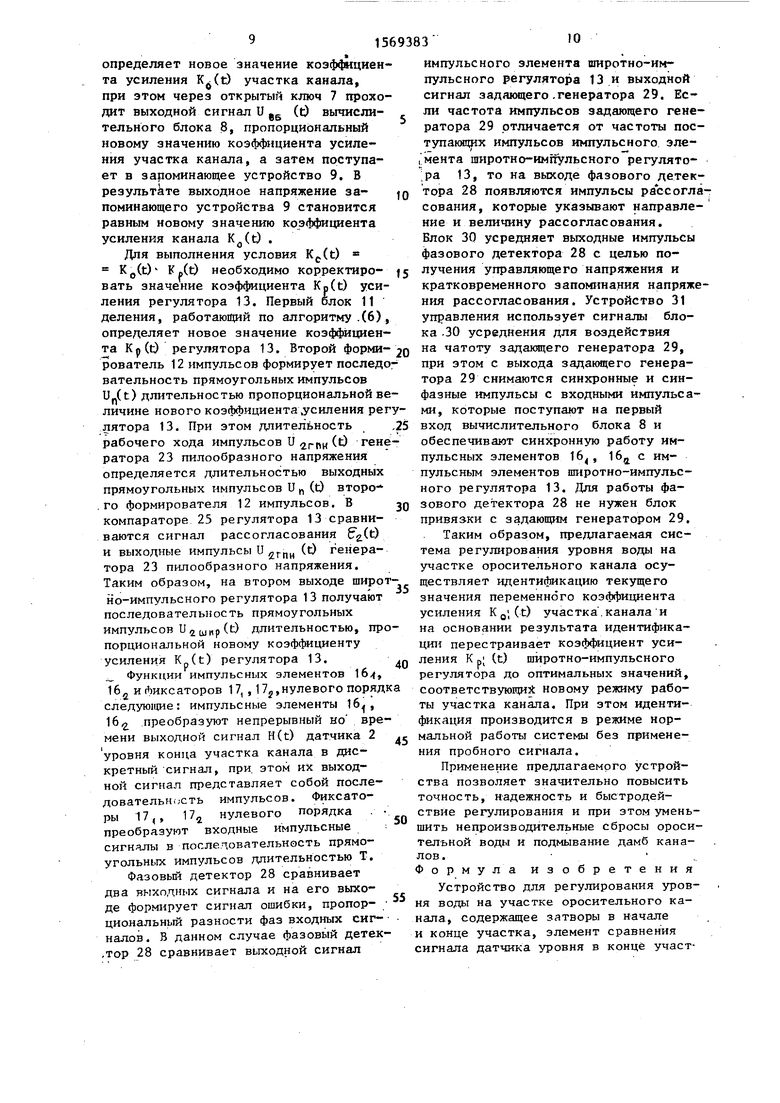
Устройство для регулирования уровня воды на участке оросительного канала, содержащее затворы в начале и конце участка, элемент сравнения сигнала датчика уровня в конце участка с сигналом уставки, подключенный через широтыо-импулъ сный регулятор к исполнительному блоку привода затвора в начале участка, к также пороговый элемент и блок синхронизации, подключенные соответственно к выходам элемента сравнения и широт- но-импульсного регулятора, отличающееся тем, что, с целью повышения надежности и быстродействия регулирования, устройство снабжено последовательно включенными между
Фи.г.1
(t)
пороговым элементом и широтно-им- пульсным регулятором блоком задержки, первым формирователем импуль- сов, ключом, запоминающим блоком, блоком деления и вторым формирователем импульсов, а также снабжено за- датчиком коэффициентов, подключенным к второму входу блока деления, и вычислительным блоком, входы которого подключены к блоку синхронизации и к датчику уровня, а выход - к второму входу ключа.
%f
Редактор А.Мотыль
Составитель Г.Параев
Техред Л.Сердюкова Корректор М.Шароши
Заказ 1428
Тираж 533
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
vr t
Подписное
| Устройство для регулирования уровня воды на участке канала | 1986 |
|
SU1418407A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
