00
о
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования уровня воды на участке канала | 1990 |
|
SU1781674A1 |
| Устройство для регулирования уровня воды на участке оросительного канала | 1987 |
|
SU1569383A1 |
| Адаптивный импульсный регулятор для нестационарных объектов с запаздыванием | 1981 |
|
SU993207A1 |
| Устройство для регулирования уровня воды в канале | 1986 |
|
SU1348788A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| Регулятор напряжения с многозонной импульсной модуляцией | 1982 |
|
SU1022129A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| Импульсный регулятор | 1977 |
|
SU732809A1 |
| Устройство для регулирования уровня воды в канале | 1983 |
|
SU1095143A2 |
| Система регулирования уровня воды на канале | 1990 |
|
SU1837263A1 |
Изобретение относится к мелиорации сельского хозяйства.Цель изобретения.позышение быстродействия и точности регулирования .Устройство для регулирования уровня на участке 1 канала с перегораживающими сооружениями 2 и 3 в начале и конце участка содержит последовательно соединенные датчик уровня воды 4 3 конце участка я элемент сравнения 5 показаний датчика с ус- тазкой уровня. Исполнительный блок 13 связан приволом затвора 2 через регулятор. Регулятор выполнен в виде последовательно включенных порогового блока 6, блока 7 оценки инерционности и коэффициента усиления с до- полнителылгм входом от датчика 6 уровня, блока 8 перестройки и ши- ротно-р мпульсного модулятора 9. Кроме того, устройство включает блок 12 синхронизации, подключенный к син- хрсвходам блока 7 оценки инерционности и коэффициента усиления регулятора. Устройство определят в зависимости от динамики изменения уровня воды на участке параметры ) и K(t), характеризующие инерционность и коэффициент усиления участка канала, и назначает реализации оптимального алгоритма управления с учетом переменного интервала квантования, необходимое управление приводами затворов перегораживающих соору- жений.Применение устройства обеспечивает повьтение оперативности водорас- пределения и при этом снижает непроизводительные сбросы оросительной вады. б ил. У5 ЦгяЛ.
/////////////// //////////////////7////////
Фа8.
И зобретение относится к области мелиорации в сельском хозяйстве и может быть использовано при явтома тизации водозабора и вододеления.
Целью изобретения является повышение быстродействия и точности регулирования ,
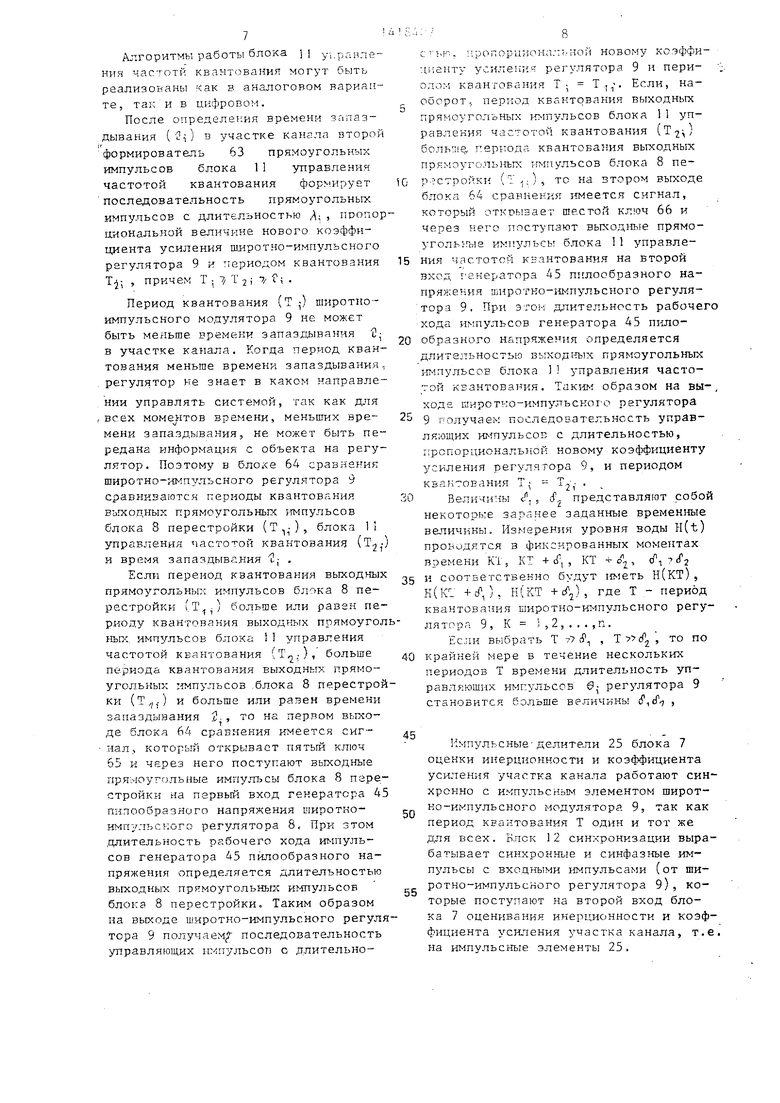
На фиг. 1 показана функциональная схема устройства; на фиг. 2 - схема блока оценки инерцион 1ости и коэффициента уср-шения; на фиг, 3 схема широтно-импульсного модулятс1
ра-, на фиг. 4 - схема блока оценки заказьшания; на фиг, 5 - в; аимосвяз блоков управления частотой квантования, блока перестройки и шнротно- импульсного модулятора.
Устройство содержит участок 1 канала, затвор 2 перегораживающего сооружения начала участка, затвор 3 перегораживающего сооружения конца участка, датчик 4 уровня воды койца участка, элемент 5 сравнения, пороговый элемент 6, блок 7 оценивания инерционности и коэффициента усиления участка канала, блок 8 перестроки, широтно-импульсный модулятор 9, блок 10 оценивания запаздывания., блок 11 управления частотой квантования, блок 12 синхронизации, исполнительный блок 13. Блоки 6-9 образуют регулятор для управления исполнительным .блоком 3 привода затвора (фиг. 2).
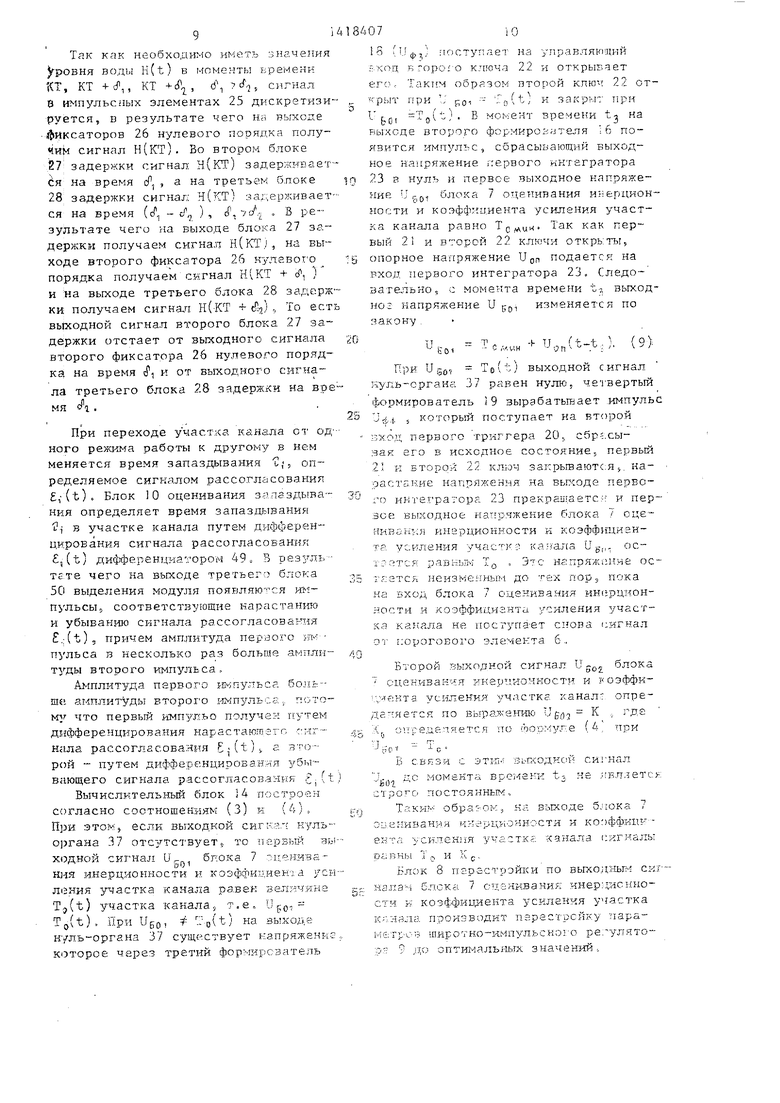
Блок 7 оценивания инерционности i-t коэффициента усиления участка канала содержит вычислительный блок 14, первый блок 35 задержки, первый формирователь 16, второй формирователь 17, третий формирователь 18, четвертый формирователь 19 первый григгер 20, первый ключ 21, второй ключ 22, первый интегратор 23 и пер 1)ый сумматор 24 .
Вычислительный блок 14 содержит ри импульсных элемента 25, три фиксатора 26 нулевого порядка, второй блок 27 задержки, третий блок 28 задержки, первый преобразователь 29, 15торой преобразователь 30, первьпл блок 3 умножения, второй блок 32 ; множения5 третий блок 33 умножения четвертый блок 34 умноженияs пятый блок 35 умножения, шестой блок 36 :тножения, нуль 37 орган, первый (шок 38 выделения модуля, второй умматор 39, третий сумматор 40
0
5
0
5
0
0
5
четверть сумматор 41 , пятый сумматор 42 и блок 43 деления.
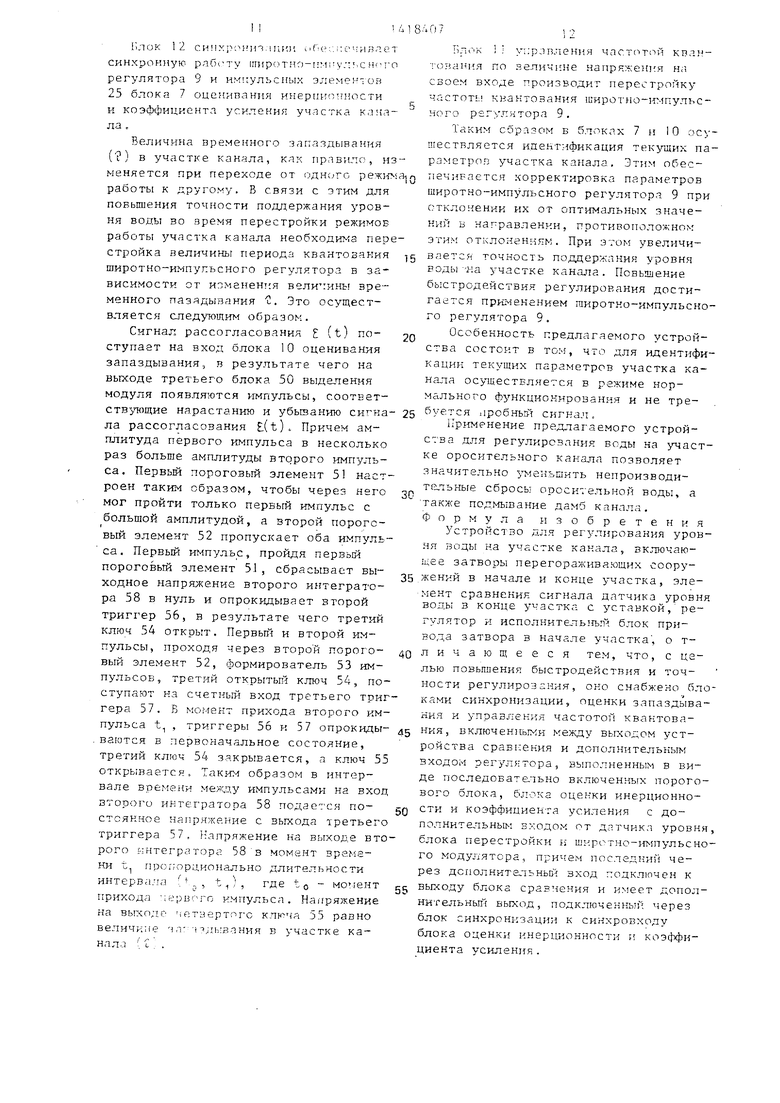
Ши р о т и о -им п ул ь с HF и ре г у л я т о р (фиг. ) содержит второй блох 4 Еьэделения модуля, генератор 45 пило- обря.зного напряжения, компаратор 46 ралейный 47 и формирователь 48 управляющих мкпульсон,
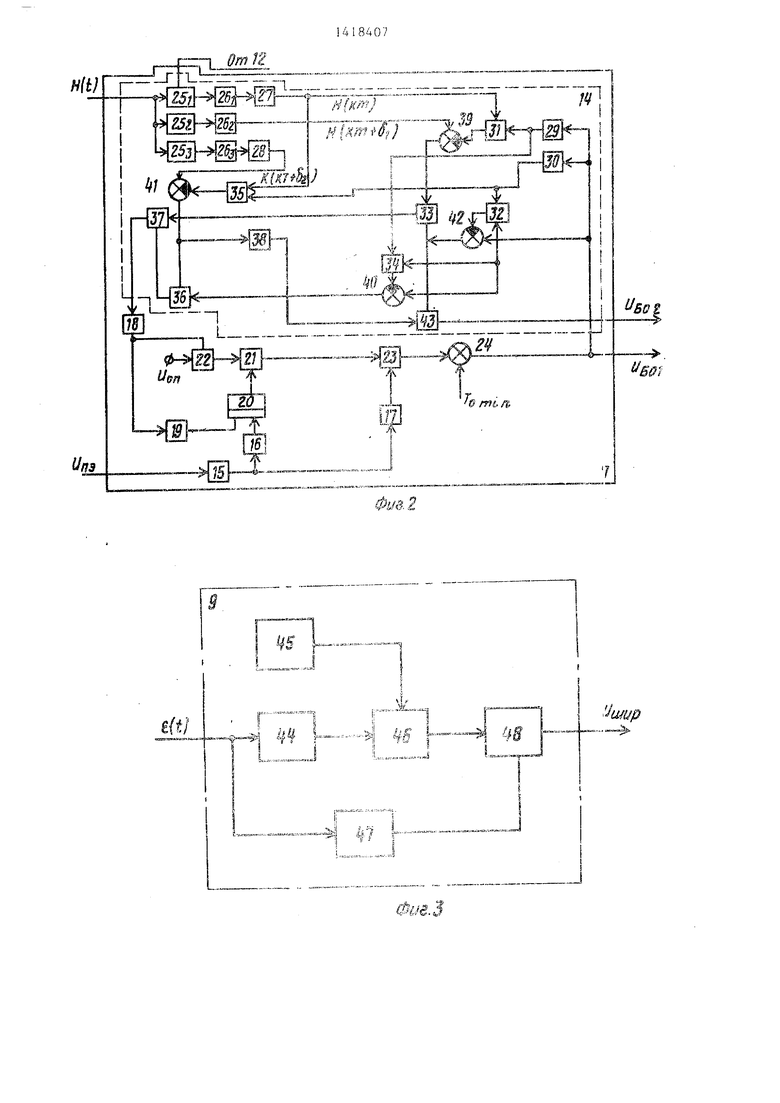
Блок 0 (фиг. 4) оценивания запаздывания содержит дифференциатор 49, третий блок 50 бы,деления модуля, первый noporoBbrii элемент 5 К второй по- роговьм элемент 52, пяты й фо миро- ватель 53, третий ключ 54, четвертьпЧ ключ 55, второй триггер 56. третий триггер 57, второй интегратор 58.
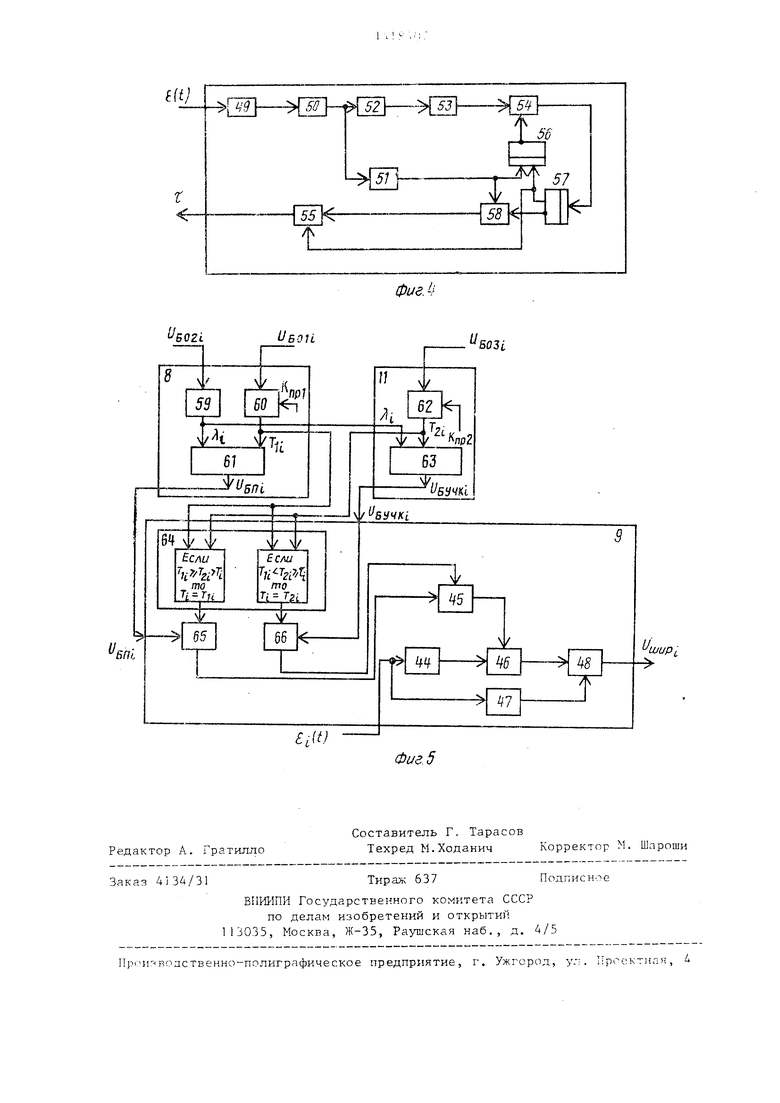
Блок 8 перестройки содержит второй блок 59 деления, седьмой блок 60 умножения и пгрвьгй формирователь 6 прямоугольных ш- пульсов (фиг, 5) ,
Блок 1i управления частотой квантования содержит восьмой блок 62 умножения и второй формирователь 63 прямоугольных импульсов (фиг. 5). Шире тнс -импульсный модулятор 9 содержит бгюк 64 сравнения, а также пятый 65 и шестой 66 ключи.
Устройство для регулирования уровн;; зоды на участке канала работает следующим образом.
При отклонениях уровней воды в конце участка 1 канала возникает сигнал рассогласования (t). Указанный сигнал г оступает на вход порогового элемента 6 и на второй вход ииротво- импульсного регулятора 9, При этрм широтно-импульсный регулятор 9 формирует последовательность управляющих импульсов (и,,,.,,() с длительностью, пропорциональной отклонениям уровней воды Б конце участка канала.
Динамику изме:- ени/1 уровней воды в канале можно представить в виде уравнения
aHU) . ,.,..: . .,- , -,-, .
-1-;елич1 на . характеризую-- шая р Нерционность участка канала -,
коэффициент усиления участка канала;
-уровень воды л канала;
-управляющее воздействне;
-время запа- дыванкя ч участке канала;
этом величинь
3
Т.
tl и Кд(г) моизменяться в широких пределах
oм«н
i Tjt) i Т
о макс
К г К (t ) : К - ( i О/мин 1-омо(
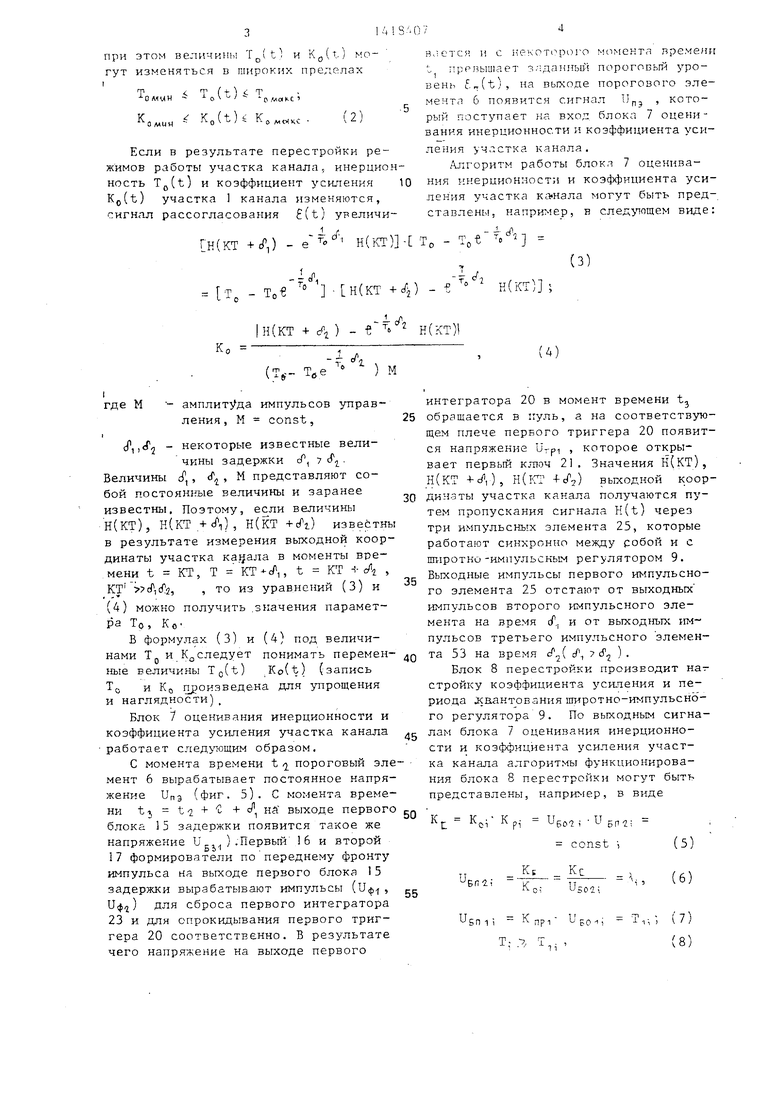
Если В результате перестройки режимов работы участка канала, инерционность Tjj(t) и коэффициент усиления 10 Ко( Ь) участка канала изменяются, сигнал рассогласования (t) увеличиН(СГ)- TO - 4
- То€ ° (кт +4) rf.A
-г
н(кт + л ) - -е о н()1
К„
где М
амплитуда импульсов управления, М const,
о 1 1 2
некоторые известные велиfti задержки сГ, у j. Величины J,, Г, М представляют собой постоянные величины и заранее известны. Поэтому, если величины Н(КТ), Н(КТ H-cPOi. Н(КТ ) известны в результате измерения выходной координаты участка кацала в моменты времени t КГ, Т ,, t КТ н-Л , КТ сГ,2, , то из уравнений (3) и (4) можно получить .значения параметра TO, Ко.
В формулах (3) и (4) под величинами Т и и KQследует понимать переменные величины TQ(t) ) (запись TO и KO щоизведена для упрощения и наглядности),
Блок 7 оценивания инерционности и коэффициента усиления участка канала работает след тощим образом.
С момента времени t q пороговый элемент 6 вырабатывает постоянное напряжение Una (фиг. 5). С момента времени tl, t + ь + с/ ни выходе первого блока 15 задержки появится такое же напряжение Ъ ..) .Первый 6 и второй
Ъ 6
17 формирователи по переднему фронту импульса на выходе первого блока 15 задержки вырабатывают импульсы (Иф, Цф) для сброса первого интегратора 23 и для опрокидывания первого триггера 20 соответственно. В результате чего напряжение на выходе первого
н с iiPKOToporo момента времени 1трр1 ышает зяданиьи порогосьй уровень f,(t), на выходе порогового эле- ментп 6 появится сигнал , который поступает на вход блока 7 оценивания инерционности и коэффиц,иента усиления участка канала.
Алгоритм работы блока 7 оценивания инерционности и коэффициента усиления участка могут быть представлены, например, в след по1цем виде:
ф -р
0
J- J1
т ° 1
-г„с/,
(3
К(КТ);
(4)
5
0
5
0
5
интегратора 20 в момент времени t обращается в пуль, а на соответствующем плече первого триггера 20 появится напряжение Urpi , которое открывает первый ключ 21. Значения Н(КТ), Н{КТ 4- с/1,) , Н ( ЬЛ- + л) выходной коор- динаты участка канала получаются путем пропускания сигнала H(t) через три импульсных элемента 25, которые работают синхронно между робой и с широтно-импульсньс регулятором 9. Выходные импульсы первого импульсного элемента 25 отстают от выходных импульсов второго импульсного эле- на время сГ.. и от выходных импульсов третьего импульсного элемента 53 на время J 7 if .
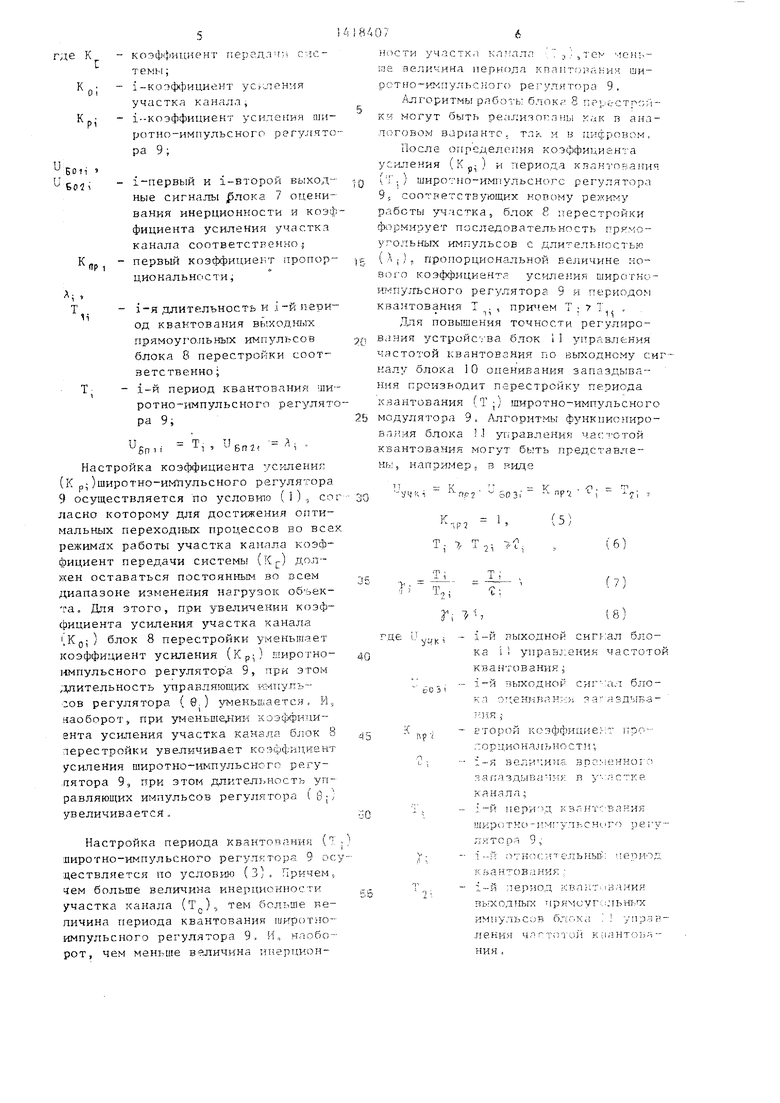
Блок 8 перестройки производит настройку коэффициента усиления и периода квантования im-ipoTHo-и тульснЬ - го регулятора 9. По выходньм сигналам блока 7 оценивания инерционности и коэффициента усиления участка канала алгоритмы функционирования блока 8 перестройки могут бытъ представлены, например, в виде
50
К. К,
БПИ
и
ВП 1
(5) (6)
(7) (8)
и,
гп
5nii - -1 -en2 Настройка коэсЬфициента уст-шеник (к От )широтно-им11ульсного регулятора 9 осуществляется по условито (1) , со ласко которому для достижения оптимальных переход Ш1х гфоцессов во все режимах работы участка канала коэффициент передачи системы (Кг) должен оставаться постоянным во всем диапазоне изменения нагрузок объекта. Для этого, при увеличении коэффициента усиления участка канала (Kg;) блок 8 перестройки уменьшает коэффициент усиления (Кр ) широтно- импульсного регулятора. 9, при этом ;длительностъ управляющих vu-myTib- сов регулятора (8.) уменьшается. И, наоборот, при уменьп1е 1ии хоэф-фиии-- ента усршения участка какала блок 8 лерестройки увеличивает коэффициент усиления широтно-импульсного регулятора 9, при этом длительность управляющих импульсов регулятора (В;) увеличивается„
Настройка периода квантования ( . щиротно-импульсного регулятора 9 С с .дествляется по условикэ (З). Причем,, чем больше величина инерционноетк участка канала (Т.,), тем больше величина периода квантования илиротно- импульсного регулятора 9. И„ наоборот, чем меньше величина ия.ертдаонБа.иия блока
уг; р а в л е н и я част о т о и
квантования могут быть представлены, например, в риде
пр7
(5)
Т..
(6)
где
Ь
- уцк
ойЪ
Toi t;
Г, Ь(8)
-i-й пыходной сигг-:ал блока i i управления частотой кваь тованин ;
-1-й -выходной сиг -:ал блока О:;ениван;::: 1 за аздыБаН11Я ;
Еторой козффицие;-::: про- :: ор цио нал ь ности;
-i-я вели :и;-1а, временного яаггаздыва-дия п у--яс ке канала;
-i-и цери Д к зл нт : вания ииротно -ИНГулье HI. 1ГО регулятора 9,
- i-й относи ejibfibtf: период кьан З ованйя ;
-i-й период ква}; г Алания в ь гх о д ньгх п р я м U у г с: л ь ш- гх: импульсов блг.Кс управления члгт;гуой к кантона- ни я .
7
Алгоритмы работы блока у-,.рапле- ния частотй квантования могут быть реализованы как в аналоговом варианте, так и в цифровом.
После определения времени запаздывания ( OiJ в участке канала второй формирователь 63 прямоугольных импульсов блока 11 управления частотой квантования формирует последовательность прямоугольных импульсов с длительностью Д , пропорциональной величине нового коэффициента усиления широтно-импульсного регулятора 9 и периодом квантования T.J; , причем Т - 7/ т 2 i -7,- t i ,
Период квантования (Т) широтио- импульсного модулятора 9 не может быть меньше времени запаздывания й в участке канала. Когда период квантования меньше времени запаздывания, регулятор ке знает в каком направлении управлять системой, так как для всех моме -1тов времени, меньших времени запаздывания, не может быть передана информация с объекта на регулятор. Поэтому в блоке 64 сравнения широтно-;дапз- льсного регулятора 9 сравниваются периоды квантования выходных прямоугольньп импульсов блока 8 перестройки (), блока 11 управления частотой квантования () и время запаздывания i- .
Если переиод кзантования выходных прямоугольны:-: импульсов блока 8 перестройки (Т) больше или равен периоду квантования выходных прямоуголных, импульсов блока 1 управления частотой квантования (Т.. ), больше периода квантования выходных прямоугольных :тмпульсов .блока 8 перестройки (т,,,.) и больше или равен времени запаздывания 2-, то на первом выходе блока 64 сравнения имеется сигнал, который открьшает пятый ключ 55 и через него поступают выходные прямоугольные импульсы блока 8 паре- стройки на первый вход генератора 45 пилообразного напряжения широтно- импульского регулятора 8, При этом .длительность рабочего хода и myль- сов генератора 45 пилообразного напряжения определяется длительностью выходных прямоугольных шетульсов блока 8 перестройки. Таким образом на выходе широтно-импульсного регулятора 9 получаем последовательность управляющих пхпульсоп с длительно 8
с- М Т. .ропорцион; ;:;--ной новому хо.эффи- Ц ;епту усиления регулятора 9 и периодом квантования Т Т
ti
Если, Ha
оборот,, период квантования выходных прямоугольных 1 тульсов блока 11 управления частотой квантования (Т болы1 е, периода квантования выходных пркмоуголь}{ых р.-мпульсов блока 8 пе- р- стройки (т.;), то на втором выходе блока 64 сравнения имеется сигнал, который открывает шестой 66 и через него поступают выходнь е прямо- уголь:-Го1а импульсь; блока 1 1 управления частотой кзантования на второй вход генератора 45 пилообразного напряжения широтно-импульсного регулятора 9, При этом длительность рабочего хода и пyльcoв генератора 45 пилообразного напряжения определяется длительностью выходных прямоугольных 1-1т-1пульсов блока управления частотой квантования. образом на вы-, ходе широтно-импульсног О регулятора 9 получаем последоБателъность управляющих и myльcoв с длительностью, г;ропорционалы1ой новому коэффициенту
усиления регулятора
и периодом
кваытования
2i
5
0
Величины с. 5 d представляют собой некоторые заранее заданные времензше величины. Измерения уровня воды H(t) проводятся в фиксированных мо е11тах времени КТ, КТ + d , КТ - о, и соответственно будут иметь Н(КТ), К(К1 +(/,), Н(КТ где Т - период квантоват1ия широтно-ш шульсного регулятора 9, К ;,2,...,п.
Если выбрать Т 7 J , Т (j , то по крайней мере в течение нескольких периодов Т времени длительность управляющих импульсов 6 регулятора 9 становится больше величины (f,rf ,
Импульсные-делители 25 блока 7 оценки инерционности и коэффициента усиления участка канала работают синхронно с импульсным элементом широтно-импульсного модулятора 9, так как период квантования Т один и тот же для всех. Блек 12 синхронизации вырабатывает синхронные и синфазные импульсы с входными и пyльca п (от ши- ротно-импульского регулятора 9), которые поступают на второй вход блока 7 оценивания инерционности и коэффициента усиления участка канала, т.е. на импульсные элементы 25,
Так как необходимо значе ия уровня ВОДЬ H(t) в моменты времл ни КТ, КТ +J ,, КТ , 6 7, сигнал 8 импульсных элементах 25 дискретизи руется, в результате чего на выходе фиксаторов 26 нулевого порядксч получим сигнал Н(К7Г) . Во втором блоке 87 задержки сигнал Н(КТ) задерла-тЕавт ёя на время сР, , а на третьем блоке 28 задержки сигнал Н(КТ) задерживается на время (cf - сГ,., ), cf У,; « В результате чего на выходе блока 27 задержки получаем сигнал Н(КТ.;, на выходе второго фиксатора 26 кулевог о порядка получаем сигнал HlKT + d, ) и на выходе третьего блока 28 задержки получаем сигна,г1 Н(-КТ - j ,, То ест выходной сигнал второго блока 27 задержки отстает от выходного сигнала второго фиксатора 26 нулевого порядка на время tP, и от выходного сигнала третьего блока 28 задержки на вре мя « г .
При переходе участка канала от одного режима работы к другому в нем меняется время запаздывания I},, определяемое сигналом рассогласования ,-(t). Блок 10 оценивания запаздывания определяет время запазшгтвания Hi в участке канала путем дифференцирования сигнала рассогласования ,(t) диффелтентдка д ором 49. В резуль- тете чего на выходе третьего блока 50 выделения модуля появляю-т ся п льсы, соответствующие карастан да и убыванию сигнала рассогласозант я .;(t)5 причем амплитуда перйо;го ни пульса в несколько раз больше амплитуды второго импульса,
Алплитуда первого иi ;пyльc. больШ« , амплитуд, ВТОрОГ О .ИМПУЛЬС .Е ,, ПС ТО
что первый импзшьо получен путем дифференцирования нарастают am ст-тг- нгша рассогласования E (t) г рой - путем диффер ;нцироБання убывающего сигнала рассогласования ,(t
Вычислительный блок 14 построен согласно соотношениям (З) к (4), этом, если выходкой сиг ка-- кульО згана
Т7
OTC3 TCTByeTs
то
ходной сигнал U
501
блока 7
нля инерционности и коэсрфициен-;. а Л1ЭНИЯ Y - acTKa канала T5(t) участка канала,
Т ft 1 0 ь
а В ек
1 р П - - БОПри UEO, -f Joi t.; на выходе К /ль-органа 37 существует капряженг- которое через третий формирсзатель
управляющий второго ключа 22 и открывает Таким образом второй ключ при : Й01 ) и закры:
I
- о
В мо1чент времени tна
: f.
выходе второго фopмиpOr;;iтeля :Ь появится импзшьс, сбрась вающий выходное наиря;кение гтервого кнтагратора 23 в нуль и первое выходное напряжение J J.01 блока 7 оценивания инерционности и коэффициента усиления участка канала равно Т
с
1 ак как первый
79
3 то рои ZZ ключи открь:тьг,
Г п
0, и So-(
.ри нуль-органа
опорное напряжение Upn подается на вход первого интегратора 23, Следовательно, с момента времени t-;, выход- нос напряжение U j;,.,, изменяется по закону.
- То,««„ -ь U,,(t-t;), (9)
Тв /Ь) выходной сигнал 37 равен нулю, чеч вертый формирователь 9 зырабатьшает импульс Ui.j. 5 которьм поступает на БТ()1рой вход первого т риггера 20., сбр.сы- зая его в исходное состояние, первый 21 к Б торой 22 ключ закрьшаютс;я . на- pacraiiHe напряжения на вькоде первого интегратора 23 прекрангаетс:-: и пер зое; выходное натгряжекие блока / оце- кивон.;я инйрциокности и коэффицигн- та усиления учаетк каяала Ug.,. ос- ivflTCH равньм TQ , нгпряж1;иие ос- гк:атсп неизменным до тех пор, пока на вход блока 7 оценивания инсфцион- ности и лоэффицязнта усиления участка канала не посгупа ет снова сигнал от порогового элемента 6,
USDZ блока
Второй выходной сигнал сцекиванчя инерционкости и оэффк- ;:-лектз ус 1ления участка канал: определяется по BbrpajKeKHKi ирд-э - К , где X опсрцепнетсч по (Ьоимуле (4 при
т .,, гг J jjr-I - - G
В СВЕЗИ с этн- зькоднс Й си:1 нал до момента вр еиеки tj, не лвллетс постоянным;,
Таки;-- образок J ка выходе блока 7 о:;ениван; я и ерцяояности и копффкцг- ек га ;;силек;1Я участкг канала |;игналы ptiBHbi Т J и К р.
Блок 8 пграстрэйки по выходным ск налам блока 7 сценквания инерциснио- сти и коэффиидлента усиления участка канала производит парестройку пара- не:Т|;.-оч широтно-кмпульского ре: улято- 0-; 9 гю оптимальных значений,
.лок 12 сн 1хр;м{цт,|ции. iTe:; сс-чивает синхронную, работу 1Яир()тно-г М1 у/: С н то регулятора 9 и импульсных элемен ов 25 блока 7 оценивания иьгерпиопности и коэффициента усиления участка канала ,
Величина временного :запаздывания () в участке канала, как гфавило, изменяется при переходе от реж1« работы к другому. В связи с этим для поБьшения точности поддержания уровня воды во время перестройки режимов работы участка канала необходима перестройка величины периода квантования широтно-импупьсного регулятора в зависимости от и::менен ;я вели гины временного пазядывания . Это осуществляется спедующим образом.
Сигнал рассогласования (t) по- ступает на вход блока 10 оценивания запаздывания, в результате чего на выходе третьего блока 50 выделения модуля появляются )-шпульсы, соответствующие нарастанию и убыванию сигка- ла рассогласования t{t. Причем амплитуда первого импульса в несколько раз больше амплитуды второго импульса. Первый пороговый элемент 51 настроен таким образом, чтобы через него мог пройти только первый импульс с большой амплитудой, а второй пороговый элемент 52 пропускает оба импуль са. Первый импульс, пройдя первый пороговый элемент 51, сбрасывает вы- ходное напряжение второго иьгтеграто- ра 58 в нуль и опрокидывает второй триггер 56, в результате чего третий ключ 54 открыт. Первьш и второй импульсы, проходя через второй порого- вый элемент 52, формирователь 53 импульсов, третий открытьш ключ 54, поступают на счетный вход третьего триггера 57. В MOf.-гект прихода второго км- пульса t, , тр лггеры 56 и 57 опрокиды-
.ваются в первоначальное состояние, третий ключ 54 закрывается, а ключ 55 открьтается. Таки:- образом в интервале времени меж,пу импульсами на вход второго интегратора 58 подае З ся по- стсянное напряжение с выхода третьего триггера 57, }1апряжение на выходе второго -гнтегра тора 58 в момент времени о пропорционально длительности интервала (,, t), где to мо шнт прихода lepBrTo импульса. Напряжение на выходе чктаертог с ключа 55 равно величк;| е ч,т чтдь вания в участке канала t , .
g
0 5 о
0 5
g ц
Блок ; у;;равленпя част(1Т(тй кван- тор.ания по величине напряжения н;; сБоем входе производит перестройку частот ; квантования широтно-з-тмпульс- ного регулнтора 9.
Таким образом в блоках 7 и IО осуществляется идентмфикация текущих параметров участка канала. Этим обеспечивается корректировка параметров широтно-импульсного регулятора 9 при откло ении их от оптимальных значений Б направлении, пpoтивoпoлoжнo : 3THiM отклоненипм. При этом увеличивается точность поддержания уровн.я воды-.ча участке канала. Повьпиение быстродействия регулирования достигается при; енением гаиротко-импульсно- го регулятора 9,
Особенность предлагаемого устройства состоит в том, что для идентификации текущих параметров участка канала осуществляется в режиме нормального функциокировання и не требуется 11робный сигка.ч.
Применение предлагаемого устройства для регулирования воды на участке оросительного канала позволяет значительно уменьшить непроизводи- Т льные сбросы ороси /ельной воды, а такхсе подмывание дамб канала. Формула изобретения
Устройство для регулирования уровня воды на участке канала, включающее затворы перегораживающих сооружений в начале и конце участка, элег- ент сравнения сигнала датчика уровня водь; в конце участка с уставкой, регулятор и исполнитель гьй блок привода затвора в начале участка, о т- личающееся тем, что, с целью повьпаения быстродействия и точности регулирования, око снабжено блоками синхронизации, оценки запаздывания и управления частотой квантования, включенпгыхи между выходом устройства срав1-;ения и дополнительным входом регулятора, выполненным в виде последоватетьно включенных порогового блока, блока оценки инерционности и коэффициента усиления с дополнительным входом от датчика уровня, блока перестро11ки li широтно-импульсного модулятора, при -:ем последний через дополнительный вход подключен к вьтоду блока сравнения и дополнительный выход, подключенный через блок синхронизации к синхровходу блока оценки инерционности и коэффициента усиления.
. --
МЭ
il- BHg-i (
L
л
4ЙЬ
L..™,..
,..L
И -IT
ii
.™,Ф™Ф1 i i.
,..L
И -IT
r.
б /W{, Л1
0ш,2
vb
|,..„..,.ж.„.
/
bj -;T
L,(t}
Фиг. 5
| Система регулирования уровня воды на участке оросительного канала | 1982 |
|
SU1135837A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
