Изобретение относится к электротехнике, в частности к прецизионным электроприводам с синфазным вращением вала электродвигателя и может быть применено в системах автоматического регулирования приводами накопителей большой емкости ЭВМ и ПЭВМ на магнито-оптических диске и ленте, а также приводами прецизионной бытовой аппаратуры.
Известно устройство для стабилизации скорости электропривода, содержащее электродвигатель с импульсным датчиком частоты вращения, подключенный к усилителю мощности соединенный входом с выходом схемы сравнения через триггер, снабженный последовательно соединенными генератором задающей частоты, счетчиком и фазовым детектором, подключенным одним входом к импульсному датчику частоты вращения, а также элемент И, асинхронные счетчики и генератор тактовой частоты со своими связями. При работе данного электропривода управляющим воздействием является величина фазового рассогласования между сравниваемыми частотами генератора задающей частоты и частоты вращения, причем частота коммутации двигателя существенно в ыШе частоты вращения при одинаковой скважности импульсов широтно-импульсного сигнала. Однако, при высоких требованиях по фазированию частоты генератора с частотой вращения данное устройство не в состоянии его выполнять, так как фазовое рассогласование между частотами является интегралом от разности частоти тем самым сохраняется ошибка по углу.
Наиболее близким к изобретению по технической сущности является электропривод постоянного тока, содержащий электродвигатель с импульсным датчиком частоты вращения, подключенный к усилителю мощности, последовательно соеди-- ненные генератор задающей частоты и счетчик, генератор тактовой частоты, фазовый детектор, второй вход которого подклюсл
С
V4 00
00 О О
чен к выходу импульсного датчика частоты вращения, блок сравнения, реверсивный счетчтлк, три регистра и шесть сумматоров, причем реверсивный счетчик, первый регистр, первый сумматор, второй регистр, второй сумматор, третий регистр, третий сумматор, четвертый сумматор и блок сравнения соединены последовательно, вход разрешения счета и знаковый вход реверсивного счетчика подключены к соответствующим выходам первого фазового детекторЖ Учетный вход реверсивного счетчика Соединен с выходом генератора задающей частоты, выходы первого, второго и третьего регистров соединены соответственно со вторыми входами первого, второго и третьего сумматоров, выход реверсивного счетчика соединен с первым входом пятого сумматора, второй вход которого подключен к выходу первого сумматора, а выход - к первому входу шестого сумматора, второй вход которого соединен с выходом второго сумматора, а выход - со вторым входом четвертого сумматора, второй вход блока сравнения подключен к выходу счетчика, выход блока сравнения подключен к усилителю мощности.
Однако, при высоких требованиях по точности регулирования частоты вращения вала электродвигателя данное устройство не обеспечивает форсированный выход на заданный режим и имеет длительный переходный процесс.
Целью изобретения является существенное сокращение времени переходного процесса и выход на режим практически без перерегулирования„ „ ,
Поставленная цель достигается тем, что в электропривод постоянного тока, содер- ж ащий электродвигатель с импульсным датчиком частоты вращения, подключенный к усилителю мощности, последовательно соединены генератор задающей частоты и счетчик, последовательно соединенные генератор тактовой частоты и фазовый детек- , тор, второй вход которого подключен к выходу импульсного датчика частоты вращения, блок сравнения, реверсивный счетчик, три регистра и шесть сумматоров, причем реверсивный счетчик, первый ре- ч t гистр, первый сумматор, второй регистр, ,„«: второй сумматор, третий регистр, третий cytoMafop. четвертый сумматор и блок сравнения соединены последовательно, вход разрешения счета и знаковый вход реверсивного счетчика подключены ic соответстt
вующим выходам первого фазового детектора, счетный вход реверсивногбЪчет- чика соединен с выходом генератора задающей частоты, выходы первого, второго и
третьего регистров соединены соответственно со вторыми входами, второго и третьего сумматоров, выход реверсивного счетчика - с первым входом пятого сумматора, второй вход которого подключен к выходу первого сумматора, а выход - к первому входу шестого сумматора, второй вход которого соединен с выходом второго сумматора, а выход - со вторым входом четвертого сумматора, второй вход блока срав- нен ия подключен к выходу счетчика, вводятся второй фазовый детектор и схема ЗИ. причем первый и второй входы второго фазового детектора соединены соответственно с выходами генератора тактовой частоты и выходов импульсного датчика частоты вращения, выходы второго фазового детектора соединены с соответственными входами усилителя мощности и входами
схемы ЗИ, оставшийся вход которой подключен к выходу блока сравнения, а выход - к соответствующему входу усилителя мощности.
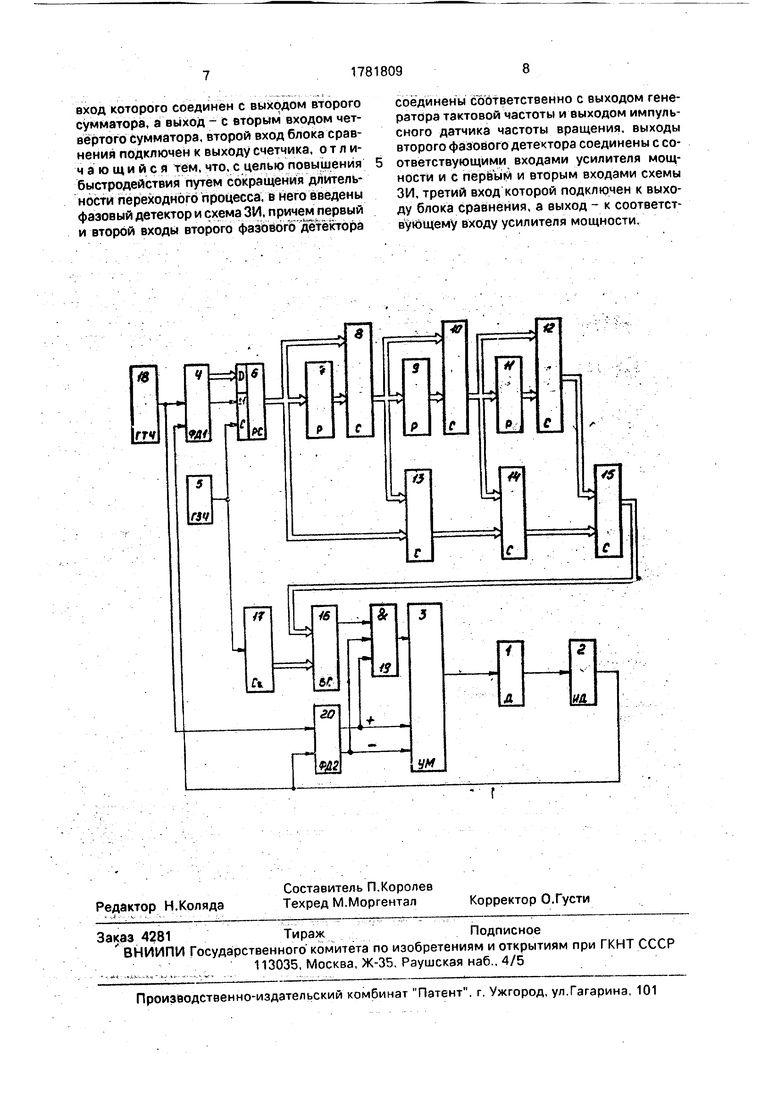
На чертеже изображена блок сх.ема
электропривода постоянного тока.
Устройство содержит электродвигатель 1, импульсный датчик 2 частоты вращения, усилитель мощности 3, первый фазовый детектор 4, генератор задающей частоты 5,
реверсивный счетчик 6, регистр 7, 9,11, сумматор 8, 10, 12, 13, 14, 15, блок сравнения 16, счетчик 17, регенератор тактовой частоты 18, схема ЗИ - 19 и второй фазовый детектор 20.
Электродвигатель 1 представляет собой бесконтактный двигатель постоянного тока. Импульсный датчик 2 частоты вращения представляет собой фотоэлектрический циклический датчик с цифровым выходом
информации. Усилитель мощности 3 выполнен на транзисторах типов 2Т709 или 2Т827. Фазовый детектор 4, 20 - микросхемы К561ИР9, К561ЛЕ5. Реверсивный счетчик 6 -микросхема К561ИЕ11. Регистры 7, 9.11 микросхемы К561ИР9 Сумматоры 8, 10, 12, 13,14 - микросхемы К561 ИМ 1. Блок сравнения 16 - микросхема К561ИП2. Счетчик 17- мик росхема К561ИЕ10.г ,,
Генераторы задающий 5 и тактовый частоты 18, представляют собой мультивибра- торы, выполненные на микросхеме К561ЛЕ5.
Электропривод постоянного тока работает следующим образом.
На первый вход фазового детектора 4 с генератора тактовой частоты 18 поступает частота fr, с которой фазируется электропривод. На второй вход фазового детектора 4 поступает частота вращения fBp Ql/2 п,
где Я- скорость вращения электродвигателя 1, Z - число меток импульсного датчика 2 частоты вращения.
На выходе фазового детектора 4 выде
ляется фазовое рассогласование р /(fr - fop) dt. В реверсивном счетчике б происходит измерение величины фазового рассогласования задающей частотой f3 поступающей из генератора задающей частоты 5 на счетный вход реверсивного счетчика б. Причем задающая частота выбирается из условия fa ft. Ре&ерсив- ный счетчик 6 производит суммирование длительности фазового рассогласования, если на его знаковом входе появляется логический уровень 1. Если же на знаковом входе 0, производится вычитание длительности фазового рассогласования из имею- щегося в этот момент значения.
Таким образом, на выходе реверсивного счетчика 6 появляется код, соответствующий интегральному значению длительности
фазового рассогласования . Смена кода и перезапись его в регистр 7 производится через период Тт 1 /fT.
В сумматоре 8 производится вычитание предыдущего значения кода и последующего. Операция вычитания производится в дополнительном коде. Таким образом, на выходе сумматора 8 получается код, соответствующий величине фазового рассогла- сования (р. При помощи регистра 7 и сумматора 8 производится первая разность сигнала управления, что соответствует его дифференцированию.
Аналогичным образом производится дифференцирование значения фазового рассогласования при помощи регистра 9 и сумматора 10 на выходе которого появляется код, соответствующий скорости привода ф. Далее, при помощи регистра 11 и сумма- тора 12 производится дифференцирование значение скорости и на выходе сумматора 12 появляется код, соответствующий ускорению привода ф, При помощи сумматоров 13, 14, 15 производится суммирование ко- дов, соответствующих значениям интеграла фазового рассогласования, скорости и ускорения.
На выходе сумматора 15 получается код, соответствующий полному, значению упраЁляющего воздействия
T - + p
При помощи блока сравнения 10 и счетчика 17 происходит преобразование кода в широтно-импульсный сигнал, являющийся результатом сложения всех составляющих регулирования и обеспечивает синфазную работу электропривода с тактовой частотой ft. Второй фазовый детектор 20 вводит в систему прецизионного.электропривода с синфазным вращением релейный режим со следующим законом регулирования:
если fBp, происходит форсированный пуск электродвигателя 1 при полном напряжении питания;
если fr fsp, на усилитель мощности 3 через элемент ЗИ 19 поступает широтно-импульсный сигнал и электродвигатель 1 работает в режиме стабилизации скорости с синфазным вращением;
если fr fBp, происходит реверс электродвигателя 1 при полном обратном напряжении питания.
Таким образом, введение в электропривод постоянного тока релейного режима при помощи второго фазового детектора и схемы ЗИ позволяет существенно сократить время переходного процесса и обеспечить переходный режим практически без перерегулирования, проводить слежение за изменяющейся частотой fT и отрабатывать рассогласование с нулевой ошибкой по углу.
Формула изобретения
Электропривод постоянного тока; содержащий электродвигатель с импульсным датчиком частоты вращения, подключенный к усилителю мощности, последовательно соединенные генератор задающей частоты и счетчик, последовательно соединенные генератор тактовой частоты и первый фазовый детектор, второй вход которого подключен к выходу импульсного датчика частоты вращения, блок сравнения, реверсивный счетчик, три регистра и шесть сумматоров, причем реверсивный счетчик, первый регистр; первый сумматор, второй регистр, второй сумматор, третий регистр, третий сумматор, четвертый сумматор и блок сравнения соединены последовательно, вход разрешения счета и знаковый вход реверсивного счетчика подключены к соответствующим выходам первого фазового детектора, счетный вход реверсивного счетчика соединен с выходом генератора задающей частоты, входы первого, второго и третьего регистров соединены соответственно с вторыми входами первого, второго и третьего сумматоров, выход реверсивного счетчика соединен с первым входом пятого сумматора, второй вход которого подключен к выходу первого сумматора, а выход - к первому входу шестого сумматора, второй
вход которого соединен с выходом второго сумматора, а выход - с вторым входом четвертого сумматора, второй вход блока сравнения подключен к выходу счетчика, отличающийся тем, что, с целью повышения быстродействия путем сокращения длительности переходного процесса, в него введены фазовый детектор и схема ЗИ, причем первый и второй входы второго фазового детектора
соединены соответственно с выходом генератора тактовой частоты и выходом импульсного датчика частоты вращения, выходы второго фазового детектора соединены с соответствующими входами усилителя мощности и с первым и вторым входами схемы ЗИ, третий вход которой подключен к выходу блока сравнения, а выход - к соответствующему входу усилителя мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1989 |
|
SU1661955A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Цифровой электропривод | 1982 |
|
SU1050077A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Электропривод | 1985 |
|
SU1275726A1 |
| Многоканальное устройство для управления вентильным преобразователем | 1990 |
|
SU1777216A1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
Использование: в прецизионных электроприводах с синхронным вращением вала. Сущность: содержит второй фазовый дискриминатор и схему ЗИ, которые осуществляют введение релейного режима регулирования. При пуске двигатель включается на полное напряжение питания, а при реверсе - на полное обратное напряжение. Таким образом, сокращается время переходного процесса и обеспечивается переходной режим без перерегулирования. 1 ил.
| Авторское свидетельство СССР № 7619856, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Электропривод постоянного тока | 1989 |
|
SU1661955A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
