2. Электропривод по п. 1, отличающийся тем, что блок тактовых частот выполнен на генераторе эталонной частоты, управляемом делителе частоты, кольцевом регистре и трех формирователях коротких импульсов, входы которых соединены с разрядными вы ходами кольцевого регистра, вход которого вместе с входом управляемого делителя частоты подключен к генератору эталонной час тоты. 3. Электропривод по п. 1, отличающийся тем, что блок ограничения выполнен на параллельно соединенных дешифраторах нулей и единиц.


| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Цифровая система управления | 1986 |
|
SU1361500A1 |
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2141164C1 |
| Двухфазный генератор сигналов инфранизких частот | 1987 |
|
SU1467740A1 |
| Электропривод постоянного тока | 1991 |
|
SU1781809A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1985 |
|
SU1267583A1 |
| Электропривод постоянного тока | 1986 |
|
SU1410256A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
1. ЦИФРОВОЙ ЭЛЕКТРОПРИВОД, содержащий электродвигатель постоянного тока с импульсным датчиком частоты вращения, подключенный к импульсному усилителю мощности, блок тактовых частот, первый реверсивный счетчик, разрядные выходы которого соединень с входами блока ограничения и регистра, триггер, выходами подключенный к первым входам двух логических элементов И, выходы которых соединень с входами сложения и вычитания второго реверсивного счетника, отличающийся тем, что, с целью повыщения точности стабилизации в диапазоне низких частот вращения двигателя, в -него введены логический элемент ИЛИ, и блок синхронизации, к входам которого подключены три выхода блока тактовых частот, импульсный датчик частоты вращения и блок ограничения, а выходы соединены с входами первого реверсивного счетчика, входы логического элемента ИЛИ подключены к выходам переноса и заема второго реверсивного сче-рчика, подключенным к установочным входам триггера, прямой выход которого соединен с входом импульсного усилителя мощности и стробирующим входом регистра, выходы которого и выход логического элеменi та ИЛИ соединены соответственно с входами параллельной записи и стробирующим (Л входом второго реверсивного счетчика, причем четвертый выход блока тактовых частот подключен к вторым входам двух логических элементов И-. СП 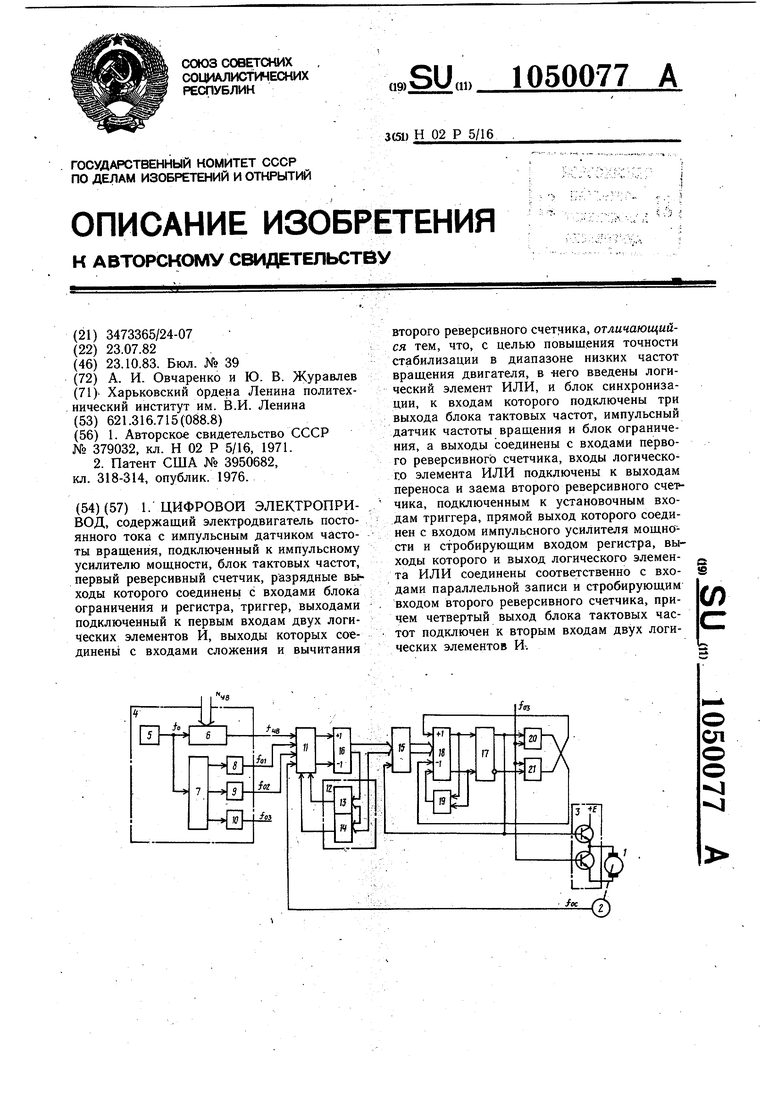
Изобретение относится к электротехнике и может быть использовано для управления двигателями небольшой мошности при высоких требованиях к статической точности регулирования. Известен электропривод, содержащий электродвигатель постоянного тока, эталонный генератор, формирователь импульсов, блок задержки, RS-триггер и импульсный датчик частоты вращения двигателя. Работа электропривода основана на широтноимпульсной модуляции выходного сигнала триггера путем переключения последнего импульсами эталонного генератора и датчика частоты вращения 1. Недостатком электропривода является невысокая точность стабилизации в диапазоне низких частот вращения двигателя, что связано с увеличением в этом диапазоне периода дискретизации и соответствующего увеличения пульсаций частоты вращения. Наиболее близким к изобретению по технической сущности является цифровой электропривод, содержащий двигатель постоянного тока с импульсным датчиком частоты вращения, подключенный к импульсному усилителю мощности, блок тактовых частот, первый реверсивный счетчик, разрядные выходы которого соединены с входами блока ограничения и регистра, триггер, выходами подключенный к первым входам двух логических элементов И, выходы которых соединены с входами второго реверсивного счетчика 2. Недостатком известного электропривода является наличие существенных пульсаций частоты вращения, особенно в дипазоне низких частот, что обусловлено изменением периодичности поступления импульсов управ ления движением, а собственно периодичность определяется частотой вращения и, естественно, при низких частотах вращения период поступления импульсов велик. Фильтрующие свойства двигателя на низких частотах ухудщаются, что и обуславливает в конечном счете увеличения пульсаций частоты вращения. Целью изобретения является повыщение точности стабилизации в диапазоне низких частот вращения двигателя. Поставленная цель достигается тем, что в цифровой электропривод, содержащий двигатель постоянного тока с импульсным датчиком частоты вращения, подключенный к импульсному усилителю мощности, блок тактовых частот, первый реверсивный счетчик, разрядные выходы которогосоединены с входами блока ограничения и регистра, триггер, выходами подключенный к первым вхо дам двух логических элементов И, выходы которых соединены с входами сложения и вычитания второго реверсивного счетчика, введены логический элемент ИЛИ и блок синхронизации, к входам которого подключены три выхода блока тактовых частот, импульсный датчик частоты вращения и блок ограничения, а выходы соединены с входами первого реверсивного счетчика, входы логического элемента ИЛИ подключены к выходам переноса, и заема второго реверсивного счетчика, подключенным также к установочным входам триггера, прямой выход которого соединен с входом импульсного усилителя мощности и стробирующим входом регистра, выходы которого и выход логического элемента ИЛИ соединены соответственно с входами параллельной записи и стробирующим входом второго реверсивного счетчика, причем четвертый выход блока тактовых частот подключен к вторым входам двух логических элементов И. Кроме того, блок тактовых частот выполнен на генераторе эталонной частоты, управляемом делителе частоты, кольцевом регистре и трех формирователях коротких импульсов, входы которых соединены .с разрядными выходами кольцевого регистра, вход которого вместе с входом управляемого делителя частоты подключен к генератору эталонной частоты. Блок ограничения выполнен на параллельно соединенных дещифраторах нулей и единиц., На чертеже приведена структурная схема цифрового электропривода. Электродвигатель 1 с импульсным датчиком 2 частоты вращения подключен к импульсному усилителю 3 мощности. Блок 4 тактовых частот содержит генератор 5 Эталонной частоты, выход которого соединен с цифроуправляемым делителем 6 частоты и с кольцевым регистром 7, разрядные выходы которого подключены к трем формирователям коротких импульсов. Выходы цифроуправляеМого делителя б частоты и формирователей 8 и 9 подключены к входам блока 11 синхронизации, к блокировочным входам которого подключен блок 12 ограничения, выполненный на параллельно соединенных по входам дешифраторах 13 и 14 нулей и единиц входы которых вместе с входами регистра 15 соединены с разрядными выходами реверсивного счетчика 16, подключенного к выходам блока 11 синхронизации. К стробирующему входу регистра 15 подключен прямой выход триггера 17, соединенный также с управляющим входом импульсного усилителя 3 мощности.
Выходы регистра 15 соединены с входами параллельной записи реверсивного счетчика 18, к стробирующему входу которого подключен выход логического элемента ИЛИ IS входы которого подключены к выходам переноса и заема реверсивного счетчика 18 вместе с установочными входами триггера 17, выходы последнего через два логических элемента И 20 и 21 соединены соответствен но с входами вычитания и сложения реверсивного счетчика 18.
Выход формирователя 10 коротких импульсов, являющийся четвертым выходом блока 4 тактовых частот, подключен к вторым входам логических элементов И 20 и 21, а также к импульсному усилителю 3 мощности.
Цифровой электропривод работает следующим образом.
Генератор 5 эталонной частоты (например, кварцевый) вырабатывает стабильную последовательность импульсов fo). Делитель частоты изменяет частоту fo в соответствии с выражением
ffo-NMB
где К - постоянная.
Следовательно, изменением кода Ы. но пропорционально изменять задающую час тоту f4B. Одновременно импульсы fo поступают на кольцевой регистр 7, на выходах которого попеременно появляются сигналы.
Формирователи 810 коротких-импульсов
обеспечивают формирование несовпадающих во времени тактовых последовательностей foi , foi, fo3.
Задающая частота fyg. и частота обратной связи f , формируемая датчиком 2 и пропорциональная частоте вращения дви гателя 1, поступают в блок 11 синхронизаБлок 12 ограничения предотвращает «опрокидывание счетчика 16 при больших или длительных рассогласованиях между fч6....и fot. Происходит это следующим образом. Если 1л foe и счетчик 16 принимает состояние «Все единицы, то срабатывает дешифра тор 14, выходной сигнал которого блокирует поступление импульсов на суммирующий вход счетчика 16. При этом импульсы fot. продолжают поступать на его вычитающий вход вплоть до входа в линейную зону работы. После этого сигнал блокировки снимается. Аналогичные процессы происходят и при соотношении с той лишь разницей, что счетчик 16 принимает состояние «Все нули и срабатывает дешифратор 18, блокирующий выходным сигналом поступ ление импульсов foe на вычитающий вход счетчика 16.
Код регистра 15 преобразуется в широтно-импульсный сигнал (период постоянный, коэффициент заполнения изменяется). Это осуществляется следующим образом. При опрокидывании триггера 17 в единичное состояние через логический элемент ИЛИ 19 разрешаете перепись кода регистра 15 в реверсивный счетчик 18, а импульсы foj поступают через логический элемент И20 на Вычитающий вход счетчика 18. Процесс уменьшения содержимого счетчика продолжается до его обнуления и появления импульса заема. Последний вызывает установку триггера 17 в нулевое состояние и вновь перепись кода регистра 15 в счетчик 18.
Теперь открыт логический элемент И 21 и импульсы fo3 поступают на суммирующий вход счетчика 18 до его заполнения и появления импульса переноса, устанавливающего триггер 17 в единичное состояние. Таким ции. Последний осуществляет «привязку им пульсов чв и foe к тактовым последовательностям fo и fo2. соответственно. Это необходимо для того, чтобы исключить одновременное поступление импульсов чв на суммирующий, а foe. на вычитающий входы реверсивного счетчика 16. Текущее значение кода в счетчике 16 пропорционально интегралу от ошибки в системе. Если же по каким-либо причинам 1чй foe ...то на суммирующий вход счетчика 16 поступает в единицу времени больще импульсов, чем на его вычитающий вход. Следовательно, код в счетчике 16 возрастает, вызывая увеличение частоты вращения вплоть до точного равенства fqe foe. Если fMb foe, то, наоборот, код в счетчике 16 уменьшается, вызывая уменьшение частоты вращения до достижения того же равенства. За счет наличия интеграла в законе регулирования система имеет нулевую методическую ошибку при управляюших воздействиях типа «скачок.
образом, на выходах триггера 17 имеем широтно-импульсный сигнал с периодом, определяемым частотой и емкостью счетчика 18. Период выбирается так, чтобы двигатель служил фильтром нижних частот (для двигателей-мощностью в единицы-десятки ватт частота модуляции сотни-единицы килогерц) Так как длительность единичного состоя ния триггера 17 пропорциональна коду регистра 15, то и длительность подключения якорной цепи двигателя 1 к источнику -f Е также пропорциональна этой величине. Ин
версный выход триггера 17 управляет нижним ключом усилителя 3. Это необходимо для сохранения малого и постоянного выход ного сопротивления усилителя 3 мощности
Поскольку импульсы foi., foa и Ьз разнесены во времени, то съем кода счетчика 16 в регистр 15 проходит только в моменты стационарного состояния счетчика 16.
Постоянство (при правильном выборе ве личины) периода модуляции обеспечивает минимальные пульсации частоты вращения двигателя 1.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для СТАБИЛИЗАЦИИ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 0 |
|
SU379032A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3950682, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
