Изобретение относится к сельскому хозяйству и может быть использовано для измерения и контроля действительной скорости движения мобильных сельскохозяйственных агрегатов (например тракторов) при выполнении ими технологических процессов.
Измерение действительной скорости сельскохозяйственного агрегата является основой систем регулировки количества разбрызгиваемых и разбрасываемых удобрений, а также высаживаемых семян. Кроме того, измерение действительной скорости движения мобильных сельскохозяйственных агрегатов необходимо; в системах оптимизации и управления режимов работы и управления агрегатов; в системах контроля технологических процессов, осуществляемых в сельском хозяйстве; при испытаниях мобильной сельскохозяйственной техники. Известны различные способы измерения скорости транспортных средств, в том числе и мобильных сельскохозяйственных агрегатов. Так, известны способы измерения скорости трактора, основанные на эффекте Допплера. Для осуществления этого способа на тракторе на заданной выест; устанавливают приемопередающий до
vi
00
ND 00
2
пплеровский датчик. При движении трактора по поверхности осуществляют зондирующее излучение указанным датчиком, направленное под углом а к опорной поверхности трактора. Отраженный от поверхности почвы сигнал принимается указанным выше датчиком и, так как трактор движется, частота зондирующего излучения отличается от частоты излучения, отраженного от поверхности почвы, на величину допплеровского сдвига 1д. Имея известные величины: длину волны излучения Я, угол а межд у опорной поверх- ностью трактора и направлением излучения, а также измеренную величину допплеровского сдвига т.д. можно определить скорость движения трактора по следующей зависимости
V
2 cos a
Однако специфика работы мобильных сельскохозяйственных агрегатов состоит в том, что в процессе выполнения технологических операций движение их осуществляется с малой скоростью (от 0,1 до А м/с) и движется агрегат по поверхности почвы, имеющей непрямолинейный рельеф случайного характера. При этом допплеровский датчик, установленный на агрегате, реагирует на любое его движение. Это вызывает появление радиальной составляющей вдоль оси датчика, т.е. кроме реакции на движение по горизонтали датчик реагирует на из- менение движения агрегата по всем степеням свободы. Кроме foro, взаимодействие агрегата во время работы на поле с прицепным орудием приводит к постоянным (опять же случайным) смещениям относительно курса движения. Влияние вышеперечисленных факторов приводит к снижению точности измерения действительной скорости агрегата.
Известен способ измерения скорости мобильных сельскохозяйственных агрегатов, согласно которому на ограниченном участке поверхности почвы возбуждают сверхвысокочастотное электромагнитное поле для восприятия неоднородностей на указанном участке. При этом возбуждают ряд электромагнитных полей на фиксированном расстоянии друг от друга, распознают полезные сигналы, контролируют отрезки времени между этими полезными сигналами и, имея фиксированное расстояние, пройденное агрегатом, и время, за которое агрегат прошел это расстояние, опр едёля ют скорость его движения.
Возбуждение над поверхностью почвы электромагнитных полей осуществляется датчиками, установленными на агрегате на фиксированном расстоянии друг от друга.
При этом каждый датчик последовательно воспринимает (распознает) только одну неоднородность на поверхности почвы. Однако вследствие механических возмущений, возникающих при движении агрегата (об этом
уже говорилось выше), существуют большая вероятность невосприятия этой неоднородности одним из датчиков, что приведет к полной потере информации о скорости движения агрегата в данный момент времени.
Кроме того, датчики, построенные на принципе возбуждения над поверхностью почвы электромагнитных полей для распознавания неоднородностей на фоне почвы, имеют низкую разрешающую способность, вследствие чего возможно распознавание только крупных неоднородностей. Это приводит к тому, что отсчеты скорости производятся в случайные моменты времени (когда найдут такую неоднородность). Случайный характер отсчетов скорости позволяет измерять только среднюю скорость движения агрегата, а не скорость движения в данный момент времени. Таким образом, снижается точность и надежность измерений.
Целью изобретения является повышение точности и надежности измерения скорости мобильных сельскохозяйственных агрегатов при выполнении ими технологических операций.
Поставленная цель достигается тем, что в способе измерения скорости мобильных сельскохозяйственных агрегатов, включающем формирование образа ограниченного участка поверхности почвы путем одновременного восприятия расположенных на нем оптических неоднородностей с помощью установленного на агрегате первым по ходу его движения матричного преобразователя, запоминание этого образа и последующую
идентификацию образов оптических неоднородностей, формируемых установленным вторым по ходу движения агрегата преобразователем при его перемещении относительно площадки поверхности почвы,
использованной для формирования образа первым преобразователем; запечатленный образ разбивают на два подмножества, каждое из которых соответствует множеству оптических неоднородностей одной из двух
равных частей площадки поверхности почвы, использованной для формирования запечатленного образа, причем линия раздела образа указанной площадки совпадет с направлением движения агрегатя поперечно
сканируют с контролируемой частотой вторым преобразователем при перемещении его вдоль указанной площадки поверхности почвы, при этом фиксируют и запоминают в виде элементов последовательности принадлежность к первому или второму подмножеству запечатленного образа образов оптических неоднородностей, формируемых вторым преобразователем, а по окончанию перемещения второго преобразователя определяют число групп данной последовательности и вычисляют скорость движения агрегата по формуле
V
2 I -f,
ск
m
где V - скорость движения агрегата, м/с;
I - длина участка поверхности почвы, использованного для формирования запечатленного образа, м
TCK - частота поперечного сканирования второго преобразователя, 1/сm - число групп одинаковых элементов этой последовательности.
Вполне понятно что для осуществления данного способа необходимо, чтобы запомненный образ имел на два и более порядка больше образов оптических неоднородностей, чем образы, сформированные вторым преобразователем Использование данного способа позволит исключить влияние механических возмущений, возникающих при движении агрегата на процесс измерения, так как образ ограниченной площадки поверхности почвы запоминается первым преобразователем на все время измерения и последующее формирование образов вторым преобразователем осуществляется в запомненном образе, являющемся, по сути, изображением указанной площадки.
В том случае если в качестве сканирующего воздействия на второй преобразователь использовать собственную частоту вибраций (механических возмущений) агрегата, то помехоустойчивость способа еще больше возрастает по сравнению Ccf бом-прототипом
Таким образом, использование заявляемого способа в значительной степени повышает точность и надежность измерения скорости агрегата и позволяет измерять ее непосредственно в данный момент времени.
При дополнительном поиске д/тя определения соответствия заявляемого технического решения критерию существенные отличия не было выявлено решений, содержащих отличительные признаки зэяеляШого способа В связи с этим, можно сделать заявляемого способа критерию существенные отличия
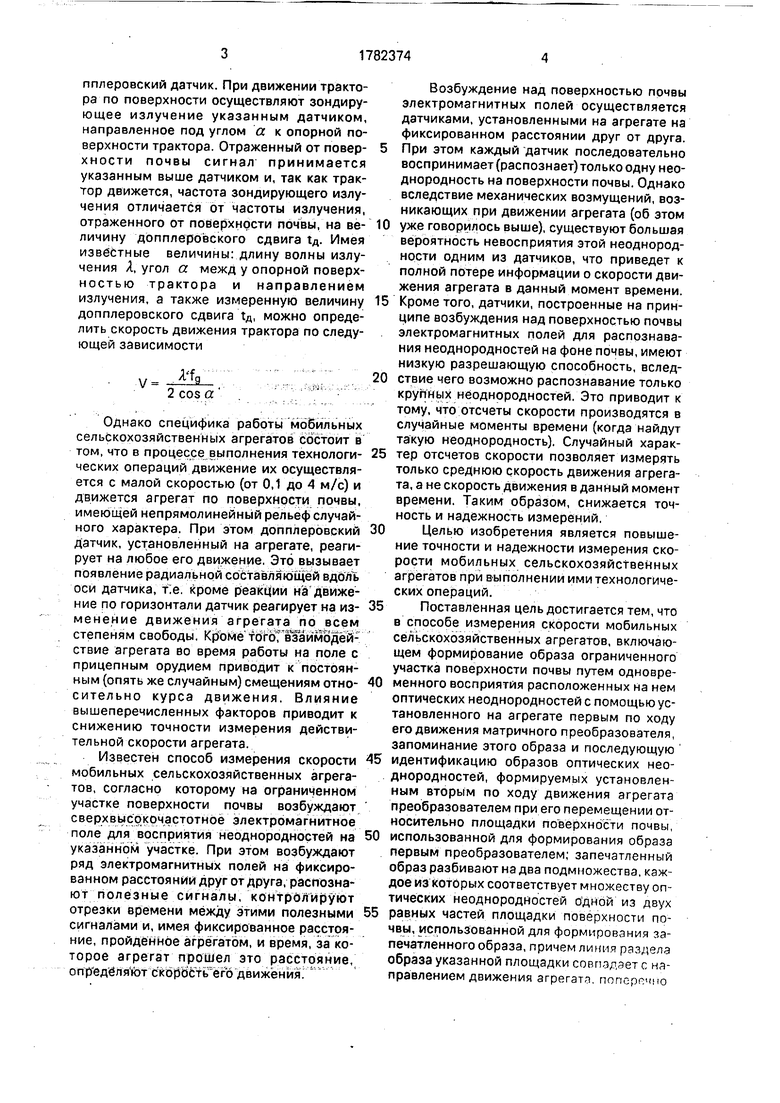
На фиг 1 приведена схема устройства
осуществляющего способ
На агрегате (например, тракторе) на заданной высоте относительно поверхности почвы устанавливают первичный матричный преобразователь 1 и первичный матричный преобразователь 2 Их располагают один за другим на продольной оси агрегата причем преобразователь 1, расположенный первым по. ходу движения агрегата, может быть выполнен в виде фотоприемной млтрицы МФ-14 или МФ-16 с телескопическим объективом, а преобразователь 2 - в виде матрицы из дискретных фотодиодов (например ФД-256) с телескопическим объективом
При движении агрегата по поверхности почвы с помощью преобразователя 1 формируют образ ограниченного участка поверхности почвы путем одновременного восприятия расположенных на нем оптических неоднородностей. Таким образом, сформированный образ представляет собой некоторое множество значений амплитуд однозначно связанное с множеством неоднородностей ограниченной площадки поверхности почвы
В момент времени to, соответствующий началу измерения скорости движения агрегата, сформированный преобразователем 1 образ передают в блок обработки сигналов
3, где указанный образ разбивается на два подмножества, каждое из которых соответствует множеству оптических неоднородностей одной из двух равных частей площадки поверхности почвы, использованной для
формирования образа, причем линия раздела образа площадки совпадает с направле нием движения агрегата и запоминается до конца измерения. После окончания работы преобразователя 1 преобразователем 2 нлчинают поперечно сканировать с контроли руемой частотой относительно площадки поверхности почвы, использованной для формирования запомненного образа При этом преобразователь 2 также перемещают
вдоль указанной площадки поверхност и почвы за счет поступательного движения агре гата и в последующие моменты времени ti t2 ... tn с помощью преобразователя 2 фор мируют образы оптических неоднородно
стей, соответствующие этим моментам времени, и передают их в блок обработки сигналов 3.
В блоке обработки сигналов 3 проводя г сопоставление образов, формируемых про
образователен 2, с подмножествами запомненного образа, определяют принадлежность формируемых образов к одному из этих подмножеств, формируют и запоминают последовательность принадлежности формируемых образов к указанным подмножествам, а после того, как преобразователь 2 закончит свое перемещение над всей площадкой поверхности почвы, использованной для формирования запомненного образа, признаком чего является непринадлежность формируемых преобразователем 2 образом ни к одному из указанных подмножеств, определяют число групп одинаковых элементов указанной последовательности и вычисляют скорость движения агрегата по следующей зависимости
V
fc
m
где V - скорость движения агрегата, м/с;
I - длина ограниченного участка поверхности почвы, использованного для формирования запечатленного образа, м;
fcK - частота поперечного сканирования преобразователя 2, 1/с;
m - число групп одинаковых элементов последовательности.
Повторяя описанные выше действия (из-за конечного значения (I), получают непрерывное измерение скорости агрегата. Вывод указанной зависимости основывался на следующем.
а)f« const;
б)I const;
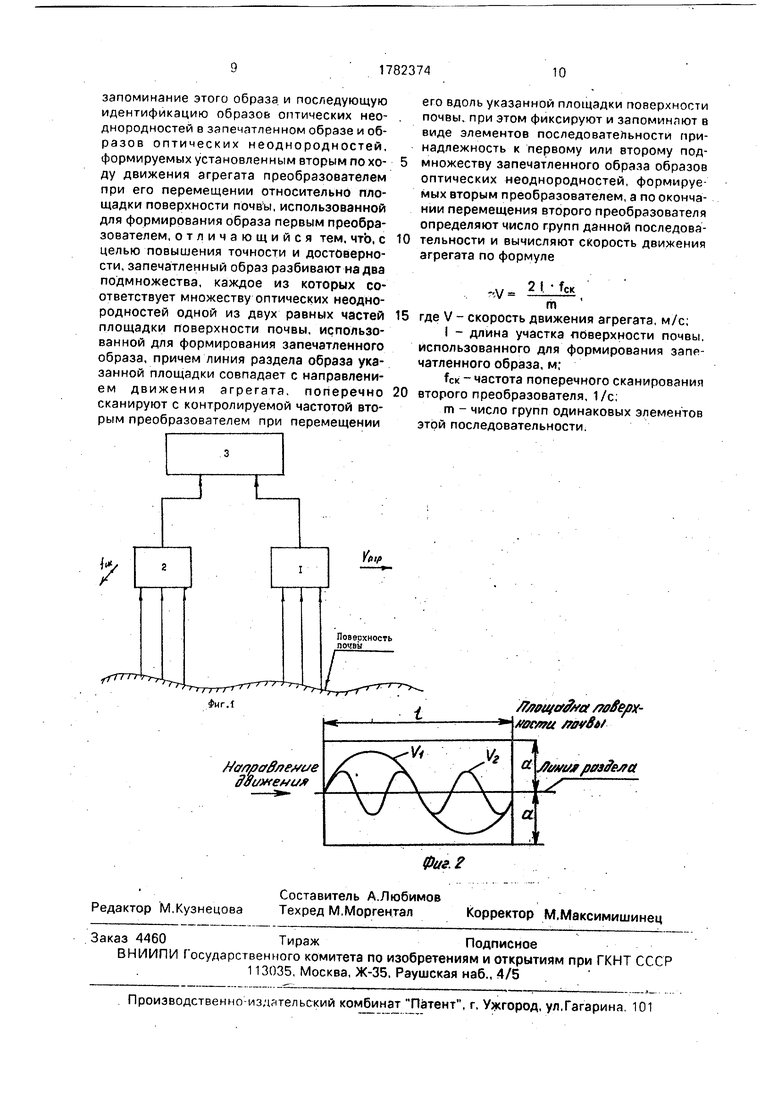
в)траектории движения второго преобразователя над указанной площадкой поверхности почвы при скоростях движения агрегата Vi и Vg (Vi Уз) будут иметь следующий вид (см. фиг.2):
Из фиг. 2 видно, что траектория движения второго преобразователя относительно линии раздела имеет вид знакопеременного колебательного процесса, причем число смен знака при тск - const однозначно определяется величинами I и V, где однако I const.
Так как для произвольной скорости V время прохождения вторым преобразователем расстояния I равно Д t - и за это же
время At произойдет за счет поперечного сканирования второго преобразователя N - At/Тек At/fen его колебаний и, соответственно, m 2N число смен знака указанного выше колебательного процесса
траектории движения второго преобразователя относительно линии раздела указанной площадки поверхности почвы. Тогда имеем
m 2N 2 At - fCK Отсюда:
v - 2 f V2 I -fc V
CK
Использование полученной зависимости для данного способа основано на том.
факте, что формируемый первым преобразователем образ является по сути изображением указанной площадки поверхности по чвы, запоминаемым затем в виде двумерного множества значений амплитуд или двоичных чисел, а операция разбиения этого множества на два подмножества эквивалента подобной операции над указанной площадкой поверхности почвы при условии равенства нулю амплитуды колебаний с частотой fCK второго преобразователя над указанной площадкой поверхности почвы в момент времени, соответствующий началу движения второго преобразователя вдоль указанной площадки. В этом случае получаемое число групп одинаковых элементов последовательности принадлежности к одному из подмножеств запомненного образа совпадает с рассмотренным выше числом смены знака колебательного процесса
относительно линии раздела и равно m
При этом тот факт, что преобразователем 1 формируется образ ограниченной площадки поверхности почвы, который запоминается на весь период измерения.
скорости, позволяет исключить влияние механических возмущений, возникающих при движении агрегата, так как распознавание оптических неоднородностей преобразователем 2 осуществляется в запомненном образе, являющемся по сути изображением указанной площадки. Если же в качестве сканирующего воздействия на преобразо ватель 2 использовать собственную частоту вибраций агрегата, то помехоустойчивости
способа еще более возрастает.
Формула изобретения Способ измерения скорости мобильных сельскохозяйственных агрегатов, включающий формирование образа ограниченного
участка поверхности почвы путем одноврр менного восприятия расположенных н; нем оптических неоднородностей с помощью ус тановленного на агрегате первым по ходу его движения матричного преобразованы
запоминание этого образа и последующую идентификацию образов оптических нео- днородностей в запечатленном образе и образов оптических неоднородностей, формируемых установленным вторым по ходу движения агрегата преобразователем при его перемещении относительно площадки поверхности почвы, использованной для формирования образа первым преобразователем, отличающийся тем. что, с целью повышения точности и достоверности, запечатленный образ разбивают на два подмножества, каждое из которых соответствует множеству оптических неоднородностей одной из двух равных частей площадки поверхности почвы, использованной для формирования запечатленного образа, причем линия раздела образа указанной площадки совпадает с направлением движения агрегата, поперечно сканируют с контролируемой частотой вторым преобразователем при перемещении
его вдоль указанной площадки поверхности почвы, при этом фиксируют и запоминлют в виде элементов последовательности принадлежность к первому или второму подмножеству запечатленного образа образов оптических неоднородностей, формируемых вторым преобразователем, а по окончании перемещения второго преобразователя определяют число групп данной последовательности и вычисляют скорость движения агрегата по формуле
Ц:
21 -f,
ск
m
где V - скорость движения агрегата, м/с,
I - длина участка поверхности почвы, использованного для формирования запечатленного образа, м;
f« -частота поперечного сканирования второго преобразователя, 1/с,
m - число групп одинаковых элементов этой последовательности.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости мобильного сельскохозяйственного агрегата | 1990 |
|
SU1782375A1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИПОЧВЕННОГО ИЗМЕРЕНИЯ АГРОТЕХНОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ПАХОТНОГО СЛОЯ ПОЧВЫ В ДВИЖЕНИИ | 2013 |
|
RU2537908C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГОВО-МОЩНОСТНЫХ ПОКАЗАТЕЛЕЙ ТРАКТОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2566513C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ УРОЖАЯ | 2003 |
|
RU2264703C2 |
| Устройство для управления режимом работы почвообрабатывающего агрегата | 1987 |
|
SU1493129A2 |
| Устройство для контроля характеристик сельскохозяйственных материалов | 1991 |
|
SU1797451A3 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 1991 |
|
RU2032297C1 |
| Способ формирования сигналов для распознавания растений и других неоднородностей | 1980 |
|
SU871751A1 |
| УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ СЕРВИСНЫХ РАБОТ | 2007 |
|
RU2360807C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ВИБРАЦИОННЫХ РАБОЧИХ ОРГАНОВ ПОЧВООБРАБАТЫВАЮЩИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2231241C2 |
Изобретение относится к сельскому хозяйству. Цель изобретения - повышение точности и надежности измерений. Сущность изобретения: способ включает формирование образа ограниченного участка поверхности почвы путем одновременного восприятия расположенных на нем оптических неоднородностей с помощью установленного на агрегате первым по ходу его движения матричного преобразователя. Сформированный образ запоминают до конца измерений, после чего в запомненном образе воспринимают образы оптических неоднородностей преобразователем, установленным вторым по ходу движения агрегата. Вторым преобразователем поперечно сканируют с контролируемой частотой относительно площадки поверхности почвы, используют для формирования заполненного образа и фиксируют в запомненном образе положение образов оптических неоднород- нёстей, формируемых вторым преобразова- телем при его перемещении. После того как второй преобразователь закончит свое перемещение, определяют функцию расположения указанных образов в запомненном образе и количество периодов полученной функции, попавших в запомненный образ, затем по зависимости вычисляют скорость движения агрегата. 2 ил. (Л С
J
Повесхность почвы
ФигЛ
ttaf paff/te rc/e доижения
4/V w ЧУ
Редактор М.Кузнецова
Составитель А.Любимов Техред М.Моргентал
Утр
/tffettf&faa / 0#е/}х- ffoavu ffovSti
а
Дмгмг резЯе/rct
Фиг. 2
Корректор М.Максимишинец
| Способ формирования сигналов для распознавания растений и других неоднородностей | 1980 |
|
SU871751A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
