4ik
СО 00
ю
со

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления режимом работы почвообрабатывающего агрегата | 1984 |
|
SU1259969A1 |
| Устройство для управления режимом работы почвообрабатывающего агрегата | 1985 |
|
SU1358807A1 |
| Анализатор изменения производительности почвообрабатывающего агрегата | 1989 |
|
SU1672948A1 |
| Автокорреляционный измеритель параметров псевдослучайного фазоманипулированного сигнала | 1990 |
|
SU1823137A1 |
| АВТОКОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ПСЕВДОСЛУЧАЙНОГО ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА | 1990 |
|
RU2011299C1 |
| Устройство синхронизации электроразведочных приемников | 1987 |
|
SU1449961A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ПОЧВЫ | 2015 |
|
RU2578444C1 |
| Система автоматического регулирования загрузки тракторного двигателя | 1983 |
|
SU1218949A1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| Умножитель-нормализатор частотныхСигНАлОВ | 1979 |
|
SU847505A1 |
Изобретение относится к сельскохозяйственной технике ,в частности, к автоматизации мобильных агрегатов. Цель изобретения - повышение производительности агрегата. Для организации поисковых процедур, основанных на сравнении значений критерия оптимизации для смежных проходов, в устройство дополнительно введены генератор 15 импульсов, измеритель 16 среднего значения, умножитель 17, запоминающее устройство 18, реверсивный счетчик 21, триггер 22, элемент ИЛИ-НЕ 23 и коммутатор 24, что позволяет организовать работу почвообрабатывающего агрегата в режиме максимальной производительности. Пороговое устройство 14 подключено к датчику 1 загрузки 4 при выглублении плуга на его выходе появляется логический ноль, при заглублении - единица. С началом рабочего движения пороговым устройством 14 обнуляется измеритель 16 среднего значения, запускается генератор 15 импульсов, заносится информация в запоминающее устройство 18. В процессе рабочего прохода на выходе измерителя 16 среднего значения формируется сигнал, соответствующий средней скорости движения, на выходе умножителя 17 - производительности агрегата, а на выходе устройства 19 сравнения - разности производительности на текущем и предыдущем смежном гоне. По знаку этой разности переключается направление счета реверсивного счетчика 21. 2 ил.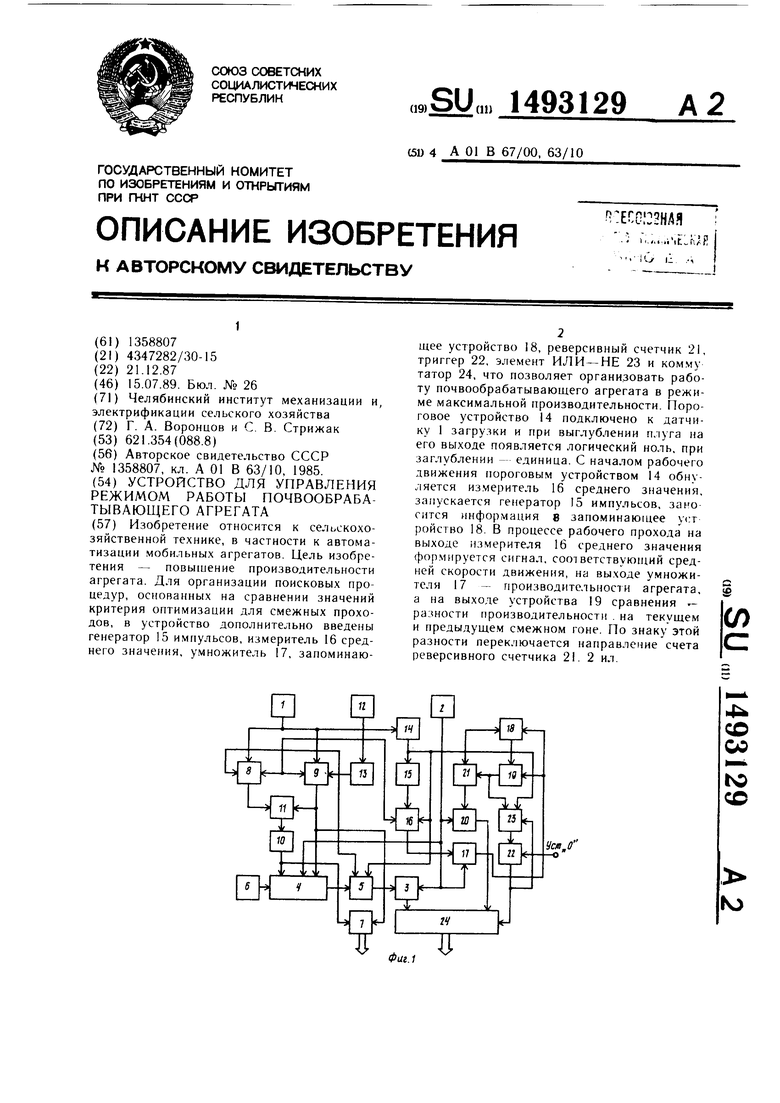
ю
....
Изобретение относится к сельскохозяйственной технике, в частности к области автоматизации мобильных агрегатов.
Цель изобретения - повышение производительности anfjeraTa.
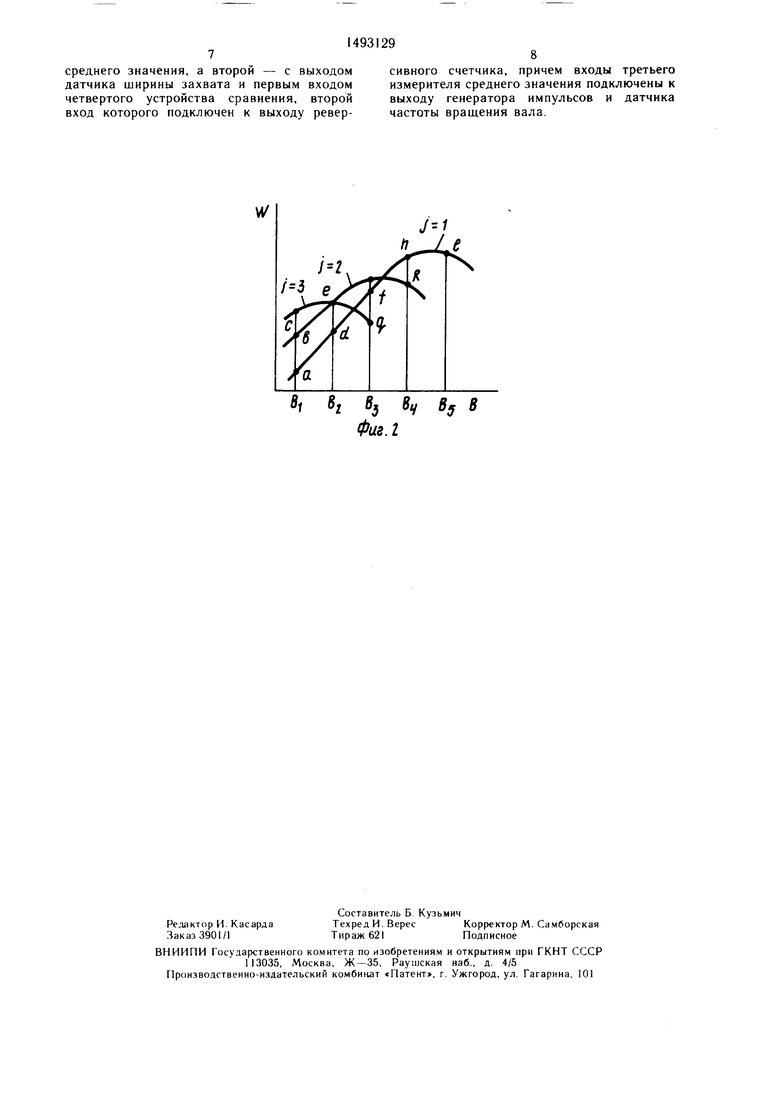
На фиг. 1 приведена структурная функциональная схема устройства; на фиг. 2 - зависимость производительности агрегата от ширины захвата на разных передачах.
Устройство для управления режимом работы почвообрабатывающего агрегата содержит подключенный к двигателю трактора датчик 1 загрузки, датчик 2 ширины захвата, первое устройство 3 сравнения, арифметическое устройство 4, первый измеритель 5 среднего значения, источник 6 опорного сигнала, второе устройство 7 сравнения, измеритель 8 среднеквадратического отклонения, второй измеритель 9 среднего значения, функциональный преобразователь 10, делитель 11, датчик 12 частоты вращения вала, делитель 13 частоты, пороговое устройство 14, генератор 15 импульсов, третий измеритель 16 среднего значения, умножитель 17, запоминающее устройство 18, третье и четвертое устройства 19 и 20 сравнения, реверсивный счетчик 21, триггер 22, элемент ИЛИ -НЕ 23, коммутатор 24.
Устройство работает следующим образом.
В процессе функционирования почвообрабатывающего агрегата на выходах коммута10
15
функциональном преобразователе 10 (постоянном запоминающем устройстве).
Измерители среднеквадратического отклонения 8 и среднего значения 9 тактируются импульсами с выхода датчика 12 частоты вращения вала колеса почвообрабатывающего орудия, а цикл измерения определяется периодом импульсов на выходе делителя 13 частоты. В то же время сигнал на выходе делителя 13 частоты является тактовым для измерителя 5 среднего значения, цикл усреднения которого равен времени рабочего прохода и задается сигналом с выхода порогового устройства 14.
На информационный вход измерителя 5 среднего значения подается сигнал, соответствующий текущему оптимальному значению ширины захвата, который формируется арифметическим устройством 4 и определяется из выражения
20
, , (Ал.опт)7М(.«-Мсо Ovtny-о piяП
т у-Мсо
(i;
25
тора 24 и устройства 7 сравнения форми- ЗО зуемый устройством руются сигналы на изменение соответственно ширины захвата орудия и передаточного отношения трансмиссии трактора с тем, чтобы поддерживать режим работы с максимальной производительностью. При этом шигде Ьр, - ширина захвата за время t -ro рабочего прохода;
Мсо - составляющая момента сопротивления на валу двигателя, обусловленная самопередвижением трактора (формируется на выходе источника 6 опорного сигнала); номер цикла на /-м гоне, целом алгоритм управления, реали- содержит два этапа.
На первом этапе за счет организации поисковой процедуры определяется сочетание значений ширины захвата и передачи, оптимальное по производительности для средних условий обрабатываемо:- участка
Т - В
рина захвата изменяется при разворотах 35 поля. С началом работы триггер 22 уста- агрегата и фиксируется на время рабочего прохода, а передаточное отношение (передача) в процессе работы. Переключение передачи осуществляется в зависимости от соотношения сигналов на выходах функционального преобразователя 10 (Xi-omX XAJi ) и измерителя 9 среднего значения /й„ (тм - оценка текущего среднего момента двигателя, Хмппт - оптимальный коэф фициент загрузки двигателя): на повышенную передачу, если
40
45
навливается в нулевое состояние и на вход коммутатора 24 пропускается только сигнал с выхода устройства 20 сравнения. Этот сигнал, также как и сигнал на выходе устройства 3 сравнения несет информацию в какую сторону изменять (увеличивать или уменьшать) ширину захвата.
Пороговое устройство 14 подключено к датчику 1 загрузки. Поэтому при выглуб- лении плуга, сопровождающемся резким уменьшением момента на его выходе, появляется «О (задний фронт), а при заг,11уб- лонии -- (передний фронт).
Ш« /jHonr
М,,+ДХ,; на пониженную передачу, если
т„ Ялигп -Мец- ,
где ЛХ| и Д.2 - допустимые отклонения от оптимальной величины.
Значение (Лмапг-Л,,) определяется как функция от коэффициента вариации момента, которо.му соответствует сигнал на выходе делителя 11. Зависимость (лонтХ ХМе„){() (справочные данные для конкретного типа двигателей) записана в
функциональном преобразователе 10 (постоянном запоминающем устройстве).
Измерители среднеквадратического отклонения 8 и среднего значения 9 тактируются импульсами с выхода датчика 12 частоты вращения вала колеса почвообрабатывающего орудия, а цикл измерения определяется периодом импульсов на выходе делителя 13 частоты. В то же время сигнал на выходе делителя 13 частоты является тактовым для измерителя 5 среднего значения, цикл усреднения которого равен времени рабочего прохода и задается сигналом с выхода порогового устройства 14.
На информационный вход измерителя 5 среднего значения подается сигнал, соответствующий текущему оптимальному значению ширины захвата, который формируется арифметическим устройством 4 и определяется из выражения
, , (Ал.опт)7М(.«-Мсо Ovtny-о piяП
т у-Мсо
(i;
5
О зуемый устройством
где Ьр, - ширина захвата за время t -ro рабочего прохода;
Мсо - составляющая момента сопротивления на валу двигателя, обусловленная самопередвижением трактора (формируется на выходе источника 6 опорного сигнала); номер цикла на /-м гоне, целом алгоритм управления, реали- содержит два этапа.
На первом этапе за счет организации поисковой процедуры определяется сочетание значений ширины захвата и передачи, оптимальное по производительности для средних условий обрабатываемо:- участка
Т - В
5 поля. С началом работы триггер 22 уста-
5 поля. С началом работы триггер 22 уста-
0
5
навливается в нулевое состояние и на вход коммутатора 24 пропускается только сигнал с выхода устройства 20 сравнения. Этот сигнал, также как и сигнал на выходе устройства 3 сравнения несет информацию в какую сторону изменять (увеличивать или уменьшать) ширину захвата.
Пороговое устройство 14 подключено к датчику 1 загрузки. Поэтому при выглуб- лении плуга, сопровождающемся резким уменьшением момента на его выходе, появляется «О (задний фронт), а при заг,11уб- лонии -- (передний фронт).
С началом рабочего движения передним фронтом импульса порогового устройства 14 обнуляется измеритель 16 среднего 0 значения, запускается генератор 15 импульсов, заносится информация в запоминающее устройство 18. В процессе рабочего прохода на выходе измерителя 16 среднего значения формируется сигнал, соответствующий средней скорости движения, на выходе умножителя 17 - производительности агрегата, а на выходе устройства 19 сравнения - разности производительности на текущем и предыдущем смежном гоне W.
5
Если , то с окончанием рабочего прохода по заднему фронту импульса порогового устройства 14 счетчик 21 переключается в прямом направ.чении, а если , то в обратном.
Пусть условия работы агрегата соответ- ствуют тем, при которых получены зависимости на фиг, 2 и для первого прохода . Режим а и if) не соответствуют оптимальной загрузке двигателя и после разгона агрегата система управления устанав- ливает режим с : , . После окончания рабочего прохода реверсивный счетчик переключается в прямом направлении и на его выходе появляется сигнал, соответствующий В (шаг счета соответствует fi B2-fi:), так как А«/ W,. Уве- личение В будет продолжаться до BS Для режима / производительность меньше, чем для режима п, поэтому noc. ie прохода на режиме . Это приводит к тому, что счетчик 21 перек,пючается в обратном на- правлении на 64, а триггер 22 переходит в состояние «1. Выходом в зону максимума производительности заканчивается первый (поисковый) этап. На втором этапе па выход ко.ммутатора пропускается только сигнал с Е ыхода устр ;йства 3 сравнения. Он формируется как разность между фактической шириной захвата и значение.м ширины захвата, определенной как усреднение значений /):nY (I) за нремя рлбоче -.- прохода. Изменение ujHpiiHbi захвата в соответствии с сигналом на выходе усгройствя 3 сравнения позволяет компенсировать измене ние с ;едних условий при пе|)еходе от гоно к гону. т. е. стаб| ;лизировать момент двигателя на от и.ма, срсдне.м уровне. Это является декомпенсацией к управлению за счет переключения передач (непрерывная компенсация при дискретной за счет переключения передач, расширение диапазона ко.мпенса-(ии).
Сигнал выходе устройства 20 сравнения форлифуется как разность между фак- тической шириной захвата и значением ширины на выходе ревер;;ивного счетчика 2. обеспечивг1юше| о итерационное варьирование ширины .laxnara на ne()(ioM этапе. Сели бы для условий работы (,Ьиг. 2) исключить первый этап, а первый проход начать с В|, то устройство в дальнейкк -м стремилось бы поддержмиать режим, Г)ли,.1кий к режиму /, при кот(.)ром обеснсчиваегся опти.мальная по MOHiHocTH загрузка двигателя. Однако, при этом производительность агрегата была бы максимально возможной в режиме п для этих ус. овий.
В это же время, когда iia первом этапе осуш,ествляется выход пл режи.м в зоне максимума производительности длн средних условий участка поля, то :i дальнейшем ока- зывается достаточным па,иержания режима максима.тьной ;грои:;водительности изменять параметры (|лирину, передачу) при
5
0 0
0
0
5
изменении текущих условий работы на этом участке в соответствии с отклонением момента двигателя от оптимального значения (как это делается на втором этапе), т. е. осуществлять управление по критерию максимального потребления мощности двигателя.
Встречаются поля с большой неоднородностью средних условий. Поэтому может оказаться целесообразным повторение поисковой процедуры (при смене загонки, при изменении уклона участка и т. д.). В этом случае производится установка триггера 22 в состояние «О и вновь организуется поиск зоны максимума производительности.
Технико-экономический эффект при использовании предлагаемого устройства по сраипенпю с известны.м обус. ювлен нием производительности aiperaTa. Достигается это благодаря тому, что за счет введения совокупности элементов: генератора импульсов, измерителя среднего значения, умножителя, запоминающего устройства, устройсгва сравпения, реверсивного счетчика, триггера, элемента ИЛИ - НЕ и коммутатора можно задавать режим работы, близкий к оптимально.му по прозводитель- ности, в то время как прототип обеспечивает только режим, близкий к оптимальному потребляемой .мощности.
Формула изобретения
(трг)йство для управления режимом p:i- б;.1ты почвочбрабатынаюпа-то агрегата по авт. СР. ,N1 1358807, отличающееся тем. что, с це.ью по);ы1пепия производите.-гьпости аг- peidTa, в него введены генератор импуль сов, третий измеритель среднего значения, у.множитель, запоминающее устройство, третье и четвертое устройства сравнения, реверсивный счетчик, трип-ер, элемент ИЛИ - НЕ и , при этом первый и второй входы коммутатора соединены соответственно с выходами первого и четвер- то|Ч) устройства с)авнепия, а третий вход подктючен к выходу триггера, вход которого соединен с выходо.м э, 1е.1ента И.ЧИ - НЕ,
причем первый вход подключен к выходу соединен с выходом с рав11. пия и первым счетчика торой вход
элемента ИЛИ--НЕ триггера, а второй третьего yci ройства в .X о дс) .V ре вере и в но го которого сое. 1инеп с
40
55
50
выходом iijporoBoro устрслп тва, входом ге- HefiaTupa (импульсов, rpcTbiiN входо.м эле.мсн- т,ч 1. 1И- НЕ, третьи.м третьего измерителя среднего ,- чения и тактовы.м входом запоминающего устройства, информационный вход которого подк,1ючен к выходу умножителя и перво.му входу третичо устройсгва сг апнения, вюрой вход кот(;р(11о со1динен с выходом запо.минаюп1его уст ройства, при это.м перЬ,1Й вход хмпожиге.тя соединен с выходом третьего измерите, 1я
1493129
78
среднего значения, а второй - с выходомсивного счетчика, причем входы третьего
датчика ширины захвата и первым входомизмерителя среднего значения подключены к
четвертого устройства сравнения, второйвыходу генератора импульсов и датчика
вход которого подключен к выходу ревер-частоты вращения вала.
Si BI В gy By в Фаг. I
| Устройство для управления режимом работы почвообрабатывающего агрегата | 1985 |
|
SU1358807A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
