Изобретение относится к сельскому хозяйству и может быть использовано для измерения и контроля действительной скорости движения мобильных сельскохозяйственных агрегатов (например, тракторов) при выполнении ими технологических процессов.
Измерение действительной скорости сельскохозяйственного агрегата является основой систем регулировки количества разбрызгиваемых и разбрасываемых удобрений, а также высаживаемых семян. Кроме того, измерение действительной скорости движения мобильных сельскохозяйственных агрегатов необходимо в системах оптимизации и управления режимов работы и управления агрегатов; в системах контроля технологических процессов осуществл яемых в сельском хозяйстве; при испытаниях мобильной сельскохозяйственной техники Известны различные способы измерения скорости транспортных средств, D том числе и мобильных сельскохозяйственных агрегатов. Так, известны способы измере ния скорости трактора, основа нные на эффекте Допплера. Для осуществления этого способа на тракторе на заданной высоте устанавливают приемопередающий до- пплеровский датчик. При движении трактора по поверхности осуществляют зондирующее излучение указанным датчи ком, направленное под углом а к опорном поверхности трактора. Отраженный or поверхности почвы сигнал принимаетсч ука занным выше датчиком и, так как трактор движется, частота зондирующего излучения отличается от частоты излучения, отражен
XI
00 ND Ы NJ
СЛ
ного от поверхности почвы, на величину допплеровского сдвига тд. Имея известные величины, длину волны излучения А, угол а между опорной поверхностью трактора и направлением излучения, а также измеренную величину допплеровского сдвига Тд, можно определить скорость движения трактора по следующей зависимости
VA-fr
2 cos a
Однако специфика работы мобильных сельскохозяйственных агрегатов состоит в том, что в процессе выполнения технологи- ческих операций движение их осуществляется с малой скоростью (от 0,1 до 4 м/с) и движется агрегат по поверхности почвы, имеющей непрямолинейный рельеф случайного характера. При этом допплеровский датчик, установленный на агрегате, реагирует на любое его движение. Это вызывает появление радиальной составляющей вдоль оси датчика, т е. кроме реакции на движение по горизонтали датчик реагирует на из- менение движения агрегата по всем степеням свободы Кроме того, взаимодействие агрегата во время работы на поле с прицепным орудием приводит к постоянным (опять же случайным) смещениям отно- сительно курса движения. Влияние вышеперечисленных факторов приводит к снижению точности измерения действительной скорости агрегата.
Известен способ измерения скорости мобильных сельскохозяйственных агрегатов, согласно которому на ограниченном участке поверхности почвы возбуждают сверхвысокочастотное электромагнитное поле для восприятия неоднородностей на указанном участке. При этом возбуждают ряд электромагнитных полей на фиксированном расстоянии друг от друга, распознают полезные сигналы, контролируют отрезки времени между этими полезными сигналами и, имея фиксированное расстояние, пройденное агрегатом, и время, за которое агрегат прошел это расстояние, определяют скорбеть его движения
Возбуждение над поверхностью,почвы электромагнитных полей осуществляется датчиками,АустаТ:юв ле нныШ н1Г a rffeTafe на фиксйрбванном расстояний другЪ т друга. При этом каждый датчик последовательно воспринимает (распознает) Vufttafd flWy неоднородность на поверхности почвы. Однако вследствие механических возмущений, вознйка щих -rfptf дШж1ШМ ЭДэгата (об этом уже говорилось выше), существует
5
10
15 2025303540 45
50 55
большая вероятность невосприятия этой неоднородности одним из датчиков, что приведет к полной потере информации о скорости движения агрегата в данный момент времени. Кроме того, датчики, постро- енные на принципе возбуждения над поверхностью почвы электромагнитных полей для распознавания неоднородностей на фоне почвы, имеют низкую разрешающую способность, вследствие чего возможно распознавание только крупных неоднородностей. Это приводит к тому, что отсчеты скорости производятся в случайные моменты времени (когда найдут такую неоднородность). Случайный характер отсчетов скорости позволяет измерять только среднюю скорость движения агрегата, а не скорость движения в данный момент времени.
Целью изобретения является повышение точности измерения скорости мобильных сельхозагрегатов при выполнении ими технологических операций.
Поставленная цель достигается тем, что в способе измерения скорости мобильных сельскохозяйственных агрегатов, включающем восприятие неоднородностей на ограниченном участке поверхности почвы, формируют образ ограниченного участка поверхности почвы путем одновременного восприятия по меньшей мере двух расположенных на нем неоднородностей с помощью матричного первичного преобразователя, запоминают его, сопоставляют запечатленный образ с сигналами первичного преобразователя, непрерывно воспринимающего неоднородности поверхности почвы, фиксируют положение первичного преобразователя над запечатленным ограниченным участком поверхности почвы путем компенсационного перемещения первичного преобразователя относительно движущегося агрегата, измеряют расстояние и время компенсационного перемещения. При этом скорость движения агрегата определяют по соотношению расстояния и времени компенсационного перемещения первичного преобразователя.
Описанное выше формирование образа ограниченного участка поверхности почвы из нескольких одновременно воспринимаемых неоднородностей исключает возможность полной потери информации о скорости движения агрегата в данный момент времени независимо от механических возмущений, возникающих при движении агрегата по почве. Кроме того, при увеличении избыточности формируемого образа повышается разрешающая способность первичного преобразователя Все это позволяет производить отсчеты скорости движения агрегата в любой момент времени и тем самым повысить точность измерения скорости.
При дополнительном поиске для определения соответствия заявляемого технического решения критерию существенные отличия не было выявлено объектов, содержащих отличительные признаки заявляемого способа. В связи с этим можно сделать вывод о соответствии заявляемого способа критерию существенные отличия.
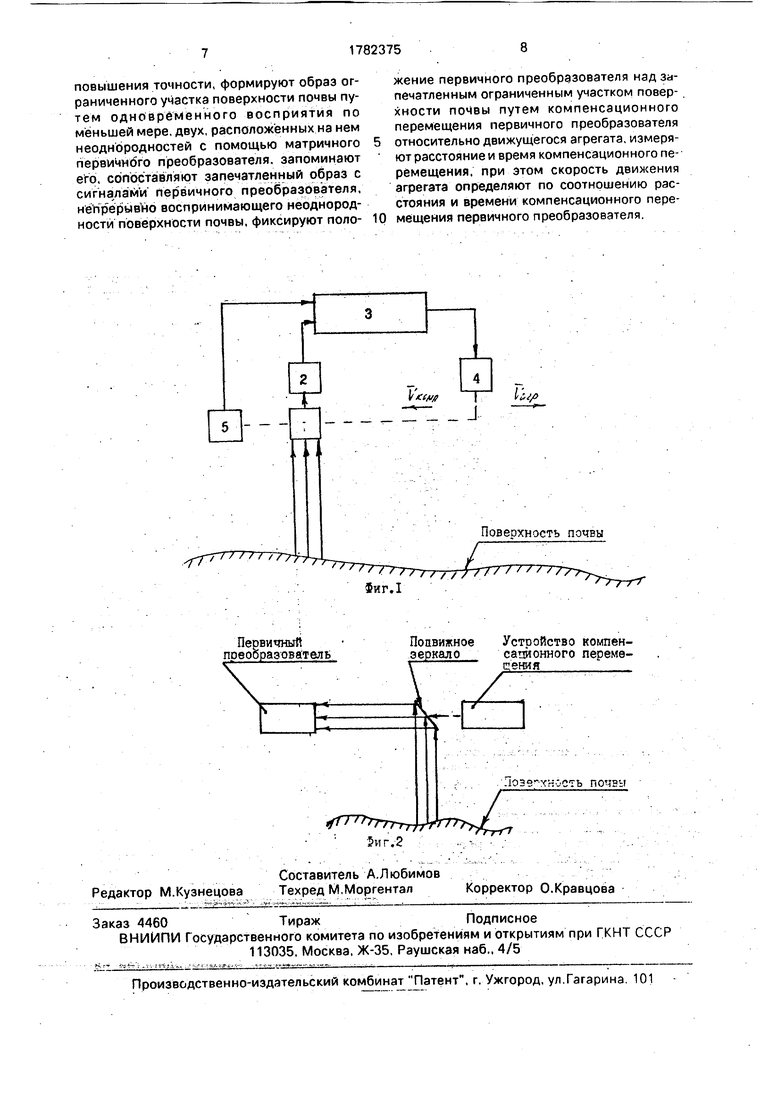
Способ измерения скорости мобильных сельскохозяйственных агрегатов осуществляют с помощью устройства, схема которого приведена на фиг. 1.
На агрегате (например тракторе) на заданной высоте относительно поверхности почвы размещают первичный матричный преобразователь 1. При движении агрегата по поверхности почвы с помощью указанного преобразователя формируют образ ограниченного участка поверхности почвы путем одновременного восприятия по меньшей мере двух расположенных на нем неоднородностей. Таким образом, сформированный образ представляет собой некоторое множество значений амплитуд, однозначно связанное с множеством неоднородностей ограниченной площадки поверхности почвы.
В момент времени to, соответствующий началу измерения скорости движения, сформированный первичным преобразователем 1 образ ограниченного участка поверхности почвы в виде множества амплитуд, соответствующего мно жест- ву оптических неоднородностей указанного участка поверхности почвы, передают на многоканальный аналого-цифровой преобразователь (АЦП) 2, с выхода которого указанный образ в виде массива двоичных чисел передают в микропроцессорное устройство (МПУ) 3, которое запоминает указанный массив в своем оперативном запоминающем устройстве. В качестве первичного преобразователя 1 может быть применена фотоприемная матрица МФ-14 или МФ-16 с телескопическим объективом. МПУ 3 может быть выполнено на основе микросхем серии К580 или К1816. АЦП 2 может быть выполнен на микросхемах серии К1107.
В моменты времени ti, t2 ... tn формируемые первичным преобразователем 1 образы передают на АЦП 2, а затем в МПУ 3, которое вырабатывает сигнал ошибки путем вычисления функции
Д W 2 2 amk(to) - amk(tn) ,
I 1J 1
где to - начальный момент времени; пtn - текущий момент времени;
amk(to) - элемент запомненного образа; amk(tn) - элемент образа, сформированного в момент времени tn где п 1, 2... m x k - размерность массивов запомQ ненного и формируемых образов.
Полученный сигнал ошибки передают в качестве управляющего на устройство компенсационного перемещения 4, которое перемещает первичный преобразователь 1
g или его поле зрения в направлении, противоположном направлению движения агрегата до установления на выходе МПУ 3 нулевого значения сигнала ошибки. В качестве устройства компенсационного перемеQ щения 4 может быть использован линейный электродвигатель.
Для уменьшения момента инерции и прочих факторов взаимодействия физических движущихся тел целесообразно пе5 ремещение не самого первичного преобразователя 1, а его поля зрения, для чего телескопическую систему первичного преобразователя 1 располагают горизонтально, а перемещение его поля зрения проQ изводят с помощью легкого подвижного зеркала (см. фиг. 2), связанного с устройством компенсационного перемещения.
Компенсационное перемещение контролируют датчиком перемещения 5, в качес стве которого может быть использован любой из известных датчиков перемещения (индуктивный, реостатный и др.). Сигналы с выхода датчика перемещения 5 передают в МПУ 3, которое, имея информацию о велио чине и времени компенсационного перемещения, вычисляет его скорость, разность по величине и противоположную по направлению скорости движения агрегата.
Таким образом, заявленный способ из5 мерения скорости движения мобильных сельхозагрегатов исключает возможность возникновения ошибок при измерении вне зависимости от скорости его движения и рельефа поверхности почвы. Это значительQ но повышает точность измерения скорости и тем самым более качественно решает задачу автоматического управления скоростью движения почвообрабатывающей и другой мобильной техники.
5 Формула изобретения
Способ измерения скорости мобильного сельскохозяйственного агрегата, включающий восприятие неоднородностей на ограниченном участке поверхности почвы, отличающийся тем, что, с целью
повышения точности, формируют образ ограниченного участка поверхности почвы путем одновременного восприятия по меньшей мере, двух, расположённых на нем неоднородностей с помощью матричного первичнбго преобразователя, запоминают его, сопоставляют запечатленный образ с сигналами первичного преобразователя, непрерывно воспринимающего неоднородности поверхности почвы, фиксируют положение первичного преобразователя над запечатленным ограниченным участком поверхности почвы путем компенсационного перемещения первичного преобразователя
относительно движущегося агрегата, измеря- ют расстояние и время компенсационного перемещения, при этом скорость движения агрегата определяют по соотношению расстояния и времени компенсационного перемещения первичного преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости мобильных сельскохозяйственных агрегатов | 1990 |
|
SU1782374A1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИПОЧВЕННОГО ИЗМЕРЕНИЯ АГРОТЕХНОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ПАХОТНОГО СЛОЯ ПОЧВЫ В ДВИЖЕНИИ | 2013 |
|
RU2537908C2 |
| Устройство для управления режимом работы почвообрабатывающего агрегата | 1987 |
|
SU1493129A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГОВО-МОЩНОСТНЫХ ПОКАЗАТЕЛЕЙ ТРАКТОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2566513C1 |
| СПОСОБ НОРМИРОВАНИЯ ВЫРАБОТКИ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2011 |
|
RU2450357C1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| Способ определения отклонения рабочего органа сельскохозяйственного агрегата от заданного направления движения и устройство для его осуществления | 1984 |
|
SU1276902A1 |
| Способ определения положения мобильной машины на плоскости | 2015 |
|
RU2608792C2 |
| СПОСОБ НОРМИРОВАНИЯ РАСХОДА ТОПЛИВА МАШИННО-ТРАКТОРНЫМ АГРЕГАТОМ | 2012 |
|
RU2510958C1 |
Сущность изобретения: формируют образ ограниченного участка поверхности почвы путем одновременного восприятия по меньшей мере двух расположенных на нем неоднородностей с помощью матричного преобразователя и запоминают его. Сопоставляя указанный образ с сигналами первичного преобразователя, непрерывно воспринимающего неоднородности поверхности почвы, фиксируют положение преобразователя над указанным ограниченным участкомпоЪер хниетиГпо чёы путе гкомпен- сационного перемещения преобразователя относительно движущегося агрегата. После этого измеряют расстояние и время компенсационного перемещения и определяют его скорость, которая равна абсолютному значению скорости поступательного движения агрегата относительно поверхности почвы 2 ил. (Л С
sfTTTT-m-rrr
Первичный преобразователь
Поверхность почвы
Фиг.1
Подвижное Устройство компен- зеркало сационного переме щения
Л039 ХНОСТЬ ПОЧВЫ
5иг.2
| Способ формирования сигналов для распознавания растений и других неоднородностей | 1980 |
|
SU871751A1 |
