Изобретение относится к машиностроению и может быть использовано в приводах круговых движений. Известны механизмы для передачи движения, содержащие винт и взаимодействующую с ним эксцентрично установленную в подшипниках с возможностью вращения гайку и привод.
Известен планетарный зубчато-винтовой механизм с внутренним сопряжением винтовых поверхностей, состоящий из прямолинейного винта, совершающей относительно него планетарное движение гайки с эксцентриковой втулкой и зубчатой шестерней, входящей во внутреннее зацепление с соосным винту колесом.
Недостаток данного аналога - наличие прямолинейного цельного винта, требующего применения реверсивного устройства и исключающего возможность работы механизма в непрерывном режиме, а также с разводкой движений по нескольким направлениям.
Следовательно, аналог имеет узкие технологические возможности.
Наиболее близким по технической сущности к предлагаемому техническому решению является принятый в качестве прототипа механизм для передачи движения, содержащий прямолинейный винт и взаимодействующую с ним эксцентрично установленную в подшипниках с возможностью вращения гайку криволинейной формы и привод.
Недостатком прототипа является наличие прямолинейного цельного винта, приводящего к ограничению хода выходного звена, необходимости реверсивного устройства, невозможности разводки движений по нескольким направлениям.
Следовательно, прототип имеет узкие технологические возможности.
Цель изобретения - расширение технологических возможностей механизма для передачи движения.
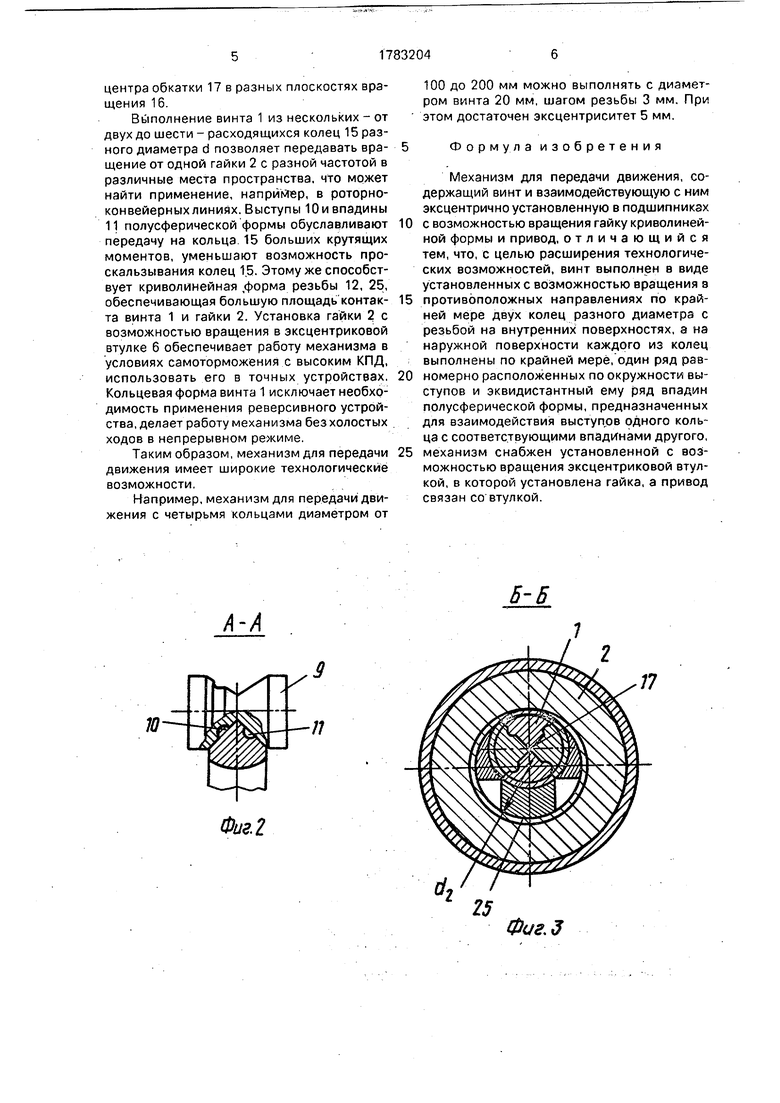
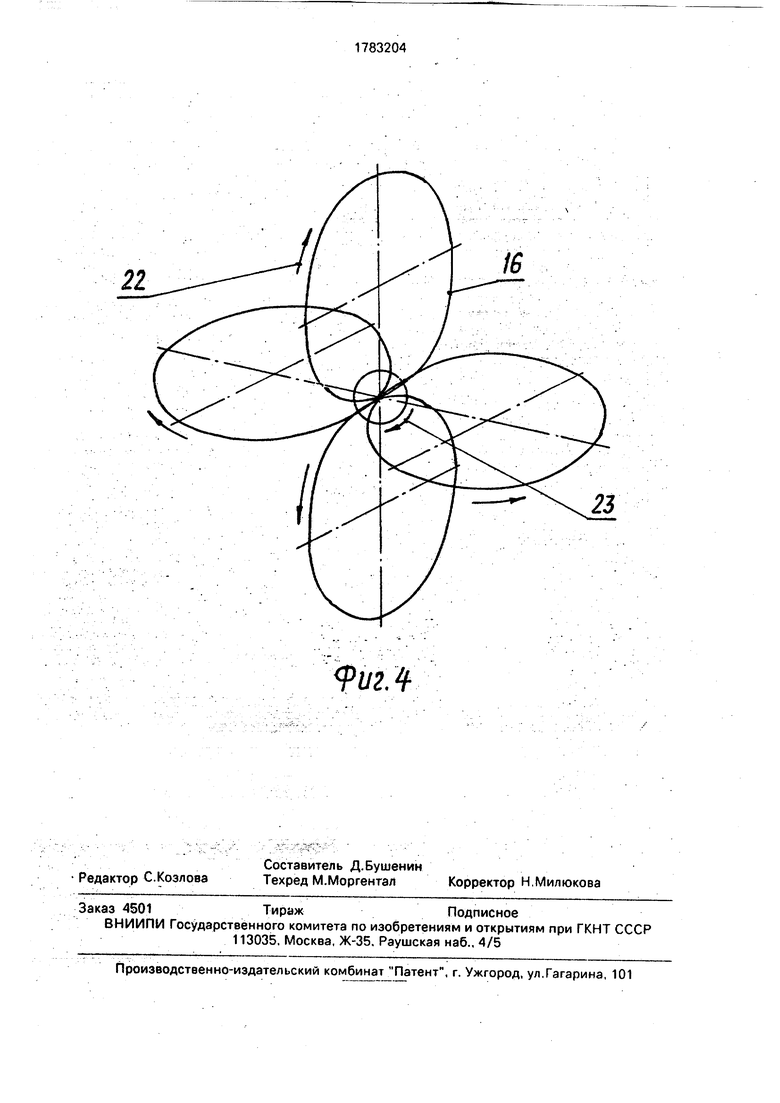
На фиг. 1 изображен механизм для передачи движения, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг, 3 - разрез Б-Б на фиг. 1; на фиг. 4 - кинематическая схема.
На фигурах представлены следующие элементы: винт 1, гайка 2, оси 3, 4, привод 5, эксцентриковая втулка 6, подшипники 7, корпус 8, ролики 9, выступы 10, впадины 11, резьба 12, наружные поверхности 13, внутренние поверхности 14, кольца 15, плоскости вращения 16, центр обкатки 17, образующая 18, окружность выступов 19, окружность впадин 20, плоскость обкатки 21, стрелки 22, 23, подшипники 24, резьба 25, диаметр кольца d, радиус кривизны образующей г, эксцентриситете, наименьший диаметр гайки dr. Указанные элементы взаимосвязаны следующим образом, с винтом 1 взаимодействует эксцентрично установленная в подшипниках 7 гайка 2 криволинейной формы. Винт 1 выполнен в виде установленных с возможностью вращения в противоположных направлениях по стрелкам 22 колец 15 разного диаметра d с резь0 бой 12 на внутренних поверхностях 14. На наружных поверхностях 13 колец 15 выполнены ряд равномерно расположенных по окружности 19 выступов 10 и эквидистантный ему ряд впадин 11 по окружности 20,
5 имеющих полусферическую форму. Выступы 10 одного кольца 15 взаимодействуют с соответствующими впадинами 11 другого кольца 15. Гайка 2 установлена через подшипники 24 в эксцентриковой втулке 6, с
0 которой связан привод 5. Кольца 15 установлены в роликах 9 и соприкасаются наружными поверхностями 13 в плоскости обкатки 21. Гайка 2 охватывает винт 1 у центра обкатки 17 таким образом, что наименьший ее
5 диаметр расположен в плоскости обкатки 21. Эксцентриковая втулка 6 закреплена в подшипниках 7, размещенных в корпусе 8. Ось 3 винта 1 смещена относительно оси 4 гайки 2 на величину эксцентриситета е.
0 Резьба 12 винта 1 сопряжена с резьбой 25 гайки 2. Радиус кривизны г образующей 18 резьбы 25 по крайней мере меньше половины диаметра d наименьшего из колец 15. Окружность выступов 19 и окружность впа5 дин 20 лежит параллельно плоскости вращения 16 колец 15. Ось 3 гайки 2 вращается вокруг центра обкатки 17 по стрелке 23,
Механизм для передачи движения работает следующим образом.
0 От привода 5 эксцентриковая втулка 6 вращается в подшипниках 7 и создает обкаточное движение вращения гайки 2 по стрелке 23 вокруг центра обкатки 17 и винта 1 в плоскости обкатки 21. Так как гайка 2
5 находится в подшипниках 24, то при вращении эксцентриковой втулки 6 гайка 2 не вращается вокруг винта 1, а происходит лишь вращение оси 3 гайки 2 вокруг оси 4 винта 1, создающее обкатку резьб 12 и 25 без
0 скольжения по принципу хула-хуп. В результате при расположении наименьшего диаметра dr гайки 2 в плоскости обкатки 21 кольца 15 приобретают вращение по стрелкам 22. Относительное проскальзывание ко5 лец 15 исключается благодаря взаимодействию выступов 10 и впадин 11. Если диаметры d колец 15 различны, то кольца имеют разную частоту вращения. Точное направление колец 15 обеспечивается роликами 9. Кольца 15 расходятся из
центра обкатки 17 в разных плоскостях вращения 16.
Выполнение винта 1 из нескольких - от двух до шести - расходящихся колец 15 разного диаметра d позволяет передавать вра- щение от одной гайки 2 с разной частотой в различные места пространства, что может найти применение, например, в роторно- конвейерныхлиниях. Выступы Юи впадины 11 полусферической формы обуславливают передачу на кольца 15 больших крутящих моментов, уменьшают возможность проскальзывания колец 15. Этому же способствует криволинейная .форма резьбы 12, 25, обеспечивающая большую площадь контак- та винта 1 и гайки 2. Установка гайки 2 с возможностью вращения в эксцентриковой втулке 6 обеспечивает работу механизма в условиях самоторможения с высоким КПД, использовать его в точных устройствах. Кольцевая форма винта 1 исключает необходимость применения реверсивного устройства, делает работу механизма без холостых ходов в непрерывном режиме.
Таким образом, механизм для передачи движения имеет широкие технологические возможности,
Например, механизм для передачи движения с четырьмя кольцами диаметром от
100 до 200 мм можно выполнять с диаметром винта 20 мм, шагом резьбы 3 мм. При этом достаточен эксцентриситет 5 мм.
Формула изобретения
Механизм для передачи движения, содержащий винт и взаимодействующую с ним эксцентрично установленную в подшипниках с возможностью вращения гайку криволинейной формы и привод, отличающийся тем, что, с целью расширения технологических возможностей, винт выполнен в виде установленных с возможностью вращения в противоположных направлениях по крайней мере двух колец разного диаметра с резьбой на внутренних поверхностях, а на наружной поверхности каждого из колец выполнены по крайней мере, один ряд равномерно расположенных по окружности выступов и эквидистантный ему ряд впадин полусферической формы, предназначенных для взаимодействия выступов одного кольца с соответствующими впадинами другого, механизм снабжен установленной с возможностью вращения эксцентриковой втулкой, в которой установлена гайка, а привод связан со втулкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для накатывания зубчатых колес | 1991 |
|
SU1810198A1 |
| Эксцентричная винтовая передача | 1990 |
|
SU1796825A1 |
| ВИНТОВАЯ ПАРА ДЛЯ ЭКСЦЕНТРИКОВОЙ ПЕРЕДАЧИ ВИНТ-ГАЙКА | 2018 |
|
RU2695742C1 |
| ВИНТОВАЯ ПЕРЕДАЧА | 1990 |
|
RU2012835C1 |
| ВИНТОВОЙ ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЙ | 2007 |
|
RU2335677C1 |
| Юстировочное устройство | 1990 |
|
SU1705790A1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| УЗЕЛ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ПЛАНЕТАРНОЙ РОЛИКОВИНТОВОЙ ПЕРЕДАЧИ | 1998 |
|
RU2140592C1 |
| Электромеханический привод зажима Барановского В.В. | 1987 |
|
SU1511000A1 |
| КАРДАННЫЙ ВАЛ ГИДРАВЛИЧЕСКОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2444600C1 |
Изобретение относится к машиностроению и может быть использовано в приводах круговых движений. Цель изобретения - расширение технологических возможностей. Механизм для передачи движения содержит винт 1, выполненный в виде установленных с возможностью вращения в противоположных направлениях колец 15 18 и разного диаметра с резьбой на внутренних поверхностях 14. На наружных поверхностях 13 каждого из колец 15 выполнены ряд равномерно расположенных по окружности выступов 10 и эквидистантный ему ряд впадин 11 полусферической формы, предназначенных для взаимодействия выступов 10 одного из колец 15 с соответствующими впадинами 11 другого. Механизм снабжен установленной с возможностью вращения эксцентриковой втулкой 6, в которой установлена гайка 2, а привод 5 связан со втулкой 6. От привода 5 эксцентриковая втулка 6, передает вращение оси 3 гайки 2 вокруг оси 4 винта 1, что создает обкатку резьб 12 и 25 без скольжения по принципу хула- хуп. В результате кольца 15 получают вращение. Точное направление вращения колец 15 обеспечивается роликами 9. 4 ил. А со С 15 vj 00 СА Ю S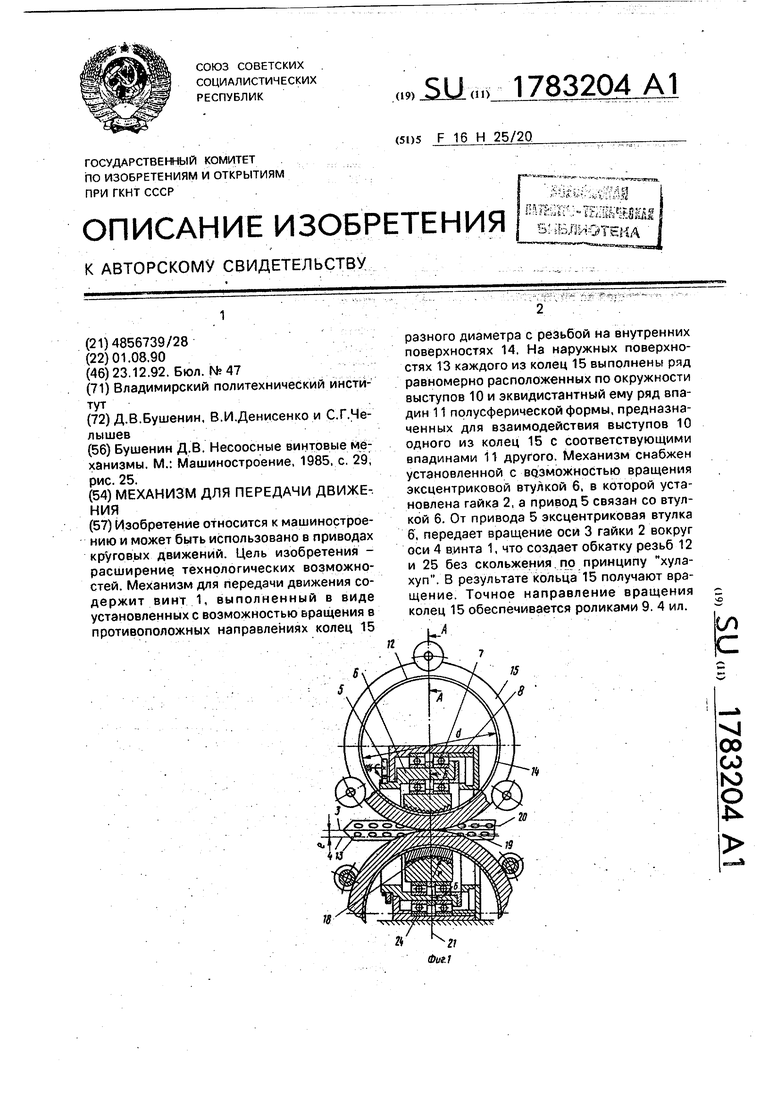
А-А
Фиг. 2
Фиг.З
21
PU2.4
16
| Бушенин Д.В | |||
| Несоосные винтовые механизмы | |||
| М.: Машиностроение, 1985, с | |||
| Солесос | 1922 |
|
SU29A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
