СО Јь

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1986 |
|
SU1661951A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Автоматический регулятор возбуждения для синхронной машины | 1981 |
|
SU1020954A1 |
| Преобразователь угол-код | 1983 |
|
SU1126988A1 |
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| Устройство для управления скоростью вращения электродвигателя постоянного тока | 1985 |
|
SU1564590A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| Устройство для моделирования синхронного генератора | 1982 |
|
SU1068952A2 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2012 |
|
RU2517055C1 |
Изобретение относится к автоматике и может быть использовано для управления объектами с ограни энными углами поворота, например оптическими дефлекторами. Цель- повышение быстродействия и точности системы достигается за счет исключения влияния моментов инерции и трения датчика скорости, прикладываемых к валу исполнительного электродвигателя. Система содержит электродвигатель 1, нагрузку 2, датчик 3 положения, блок 4 концевых выключателей, элемент 5 сравнения масштабирующий резистор б, цифроаналоговый преобразователь 7, усилитель 8 мощности, формирователь 9 сигнала управления, измеритель 10 рассогласования, задатчик 11, сигнум-реле 12, реверсивный счетчик 13, генератор 14 импульсов, формирователь 15 импульса установки, источник 16 постоянного напряжения, конденсатор 17, резистор 18, датчик скорости 19 с входами 20, 21 и выходом 22 и делитель напряжения 23, Элементы 5, 6, 7, 12, 13, 14, 15, 16, 17, 18, 23 образуют датчик 19 скорости 3 ил.
О
Изобретение относится к автоматике и может быть использовано для управления объектами с ограниченным углом поворота, например оптическими дифлекторами.
Известна с.ледящая система, содержа- щая функциональный преобразователь, первый вход которого подключен к выходу генератора опорного напряжения, вторые входы - к входам системы, а выход- if входу первого усилителя, и последовательно Сое- диненные вращающийся трансформатор, второй усилитель и двигатель, вал которого механически связан с ротором вращающегося трансформатора, а также второй функциональный преобразователь и усили- тель.
Известна следящая система, содержащая функциональный преобразователь, первый вход которого соединен с выходом генератора опорного напряжения, вторые входы - с входом системы, а выход - с входом первого усилителя и последовательно соединенные вращающийся трансформатор, второй усилитель и двигатель, вал кото- рого механически связан с ротором вращающегося трансформатора, а также дешифратор и шесть ключей, включенных между первым усилителем и обмоткой вр а- щающегося трансформатора.
Недостатком описанных устройств яв- ляется низкое качество регулирования из-за отсутствия в нихтахометрической обратной связи.
Наиболее близкой к предлагаемой является следящая система с ограниченным углом поворота вала,содержащая электродвигатель, вал которого кинематически связан с валом нагрузки и с входами датчика положения и блока концевых выключателей, измеритель рассогласования подклю- ченный суммирующим и вычитающим входами к выходам соответственно задатчи- ка и датчика положения, а выходом к первому входу формирователя сигнала управления, второй вход формирователя сигнала управления соединен с выходом датчика скорости и входом порогового блока, выход которого соединен с первым входом элемента И, второй вход которого соединен с вторым входом усилителя мощности и выходом блока концевых выключателей. Выход элемента И соединен с входом ключа, выходы которого подсоеди нены к резистору, включенному в цепь источника питания и обмотки возбуждения электродви гателя,
Недостатком описанного устройства является низкие точность и быстродействие, которые обусловлены тем, что датчик скорости имеет собственные моменты трения инерции, которые приводят к появлению дополнительных ошибок позиционирования и удлиняют переходные процессы.
Целью изобретения является повышение быстродействия и точности системы.
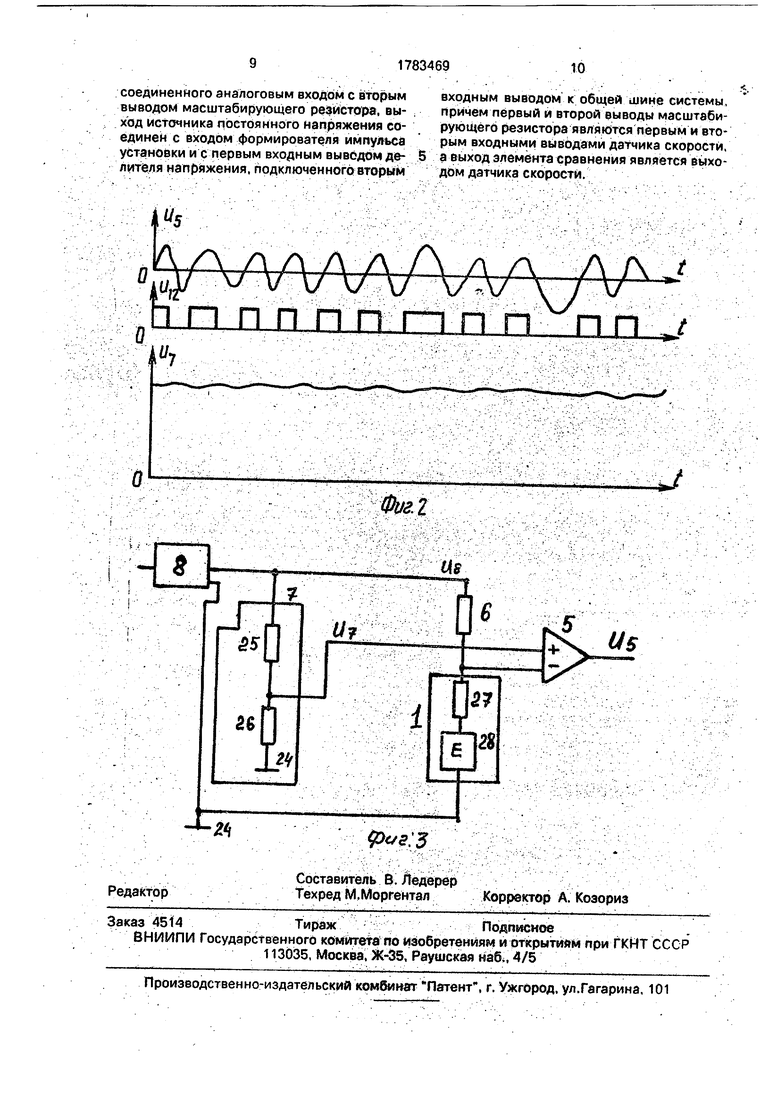
На фиг. 1 показана функциональная схема следящей системы; на фиг. 2 - эпюры рабочих напряжений; на фиг. 3 - схема, поясняющая работу датчика скорости.
Следящая система содержит электродвигатель 1, вал которого является выходным валом системы и кинематически связан с валом нагрузки 2 и со входами датчика 3 положения и блока А концевых выключателей. Первый вывод обмотки якоря электродвигателя 1 соединен суммирующим входом элемента 5 сравнения и с первым выводом масштабирующего резистора 6, второй вывод которого соединен с аналоговым входом цифроаналогового преобразователя 7 и вторым выходом усилителя 8 мощности первый выход которого соединен с вторым выводом электродвигателя 1, управляющий вход усилителя 8 мощности соединен с выходом блока 4 концевых выключателей, а информационный вход усилителя 8 - с выходом формирователя 9 сигнала управления, соединенного первым входом с выходом измерителя 10 рассогласования, управляющий вход которого соединен с датчиком 3 положения, а суммирующий вход измерителя 10 Соединен с выходом задатчика 1t Второй вход формирователя 9 сипела управления соединен с выходом элемента 5 сравнения и входом сигнум-реле 12, соединенного с выходом с входом направления счета реверсивного счетчика 13. Счетчик 13 тактовым входом соединен с выходом генератора 14 импульсов, входом разрешения установки - с выходом формирователя 15 импульса установки, соединенного входом с выходом источника 16 постоянного напряжения. Входы установки счетчика 13 соединены с общей шиной и выходом источника 16, а выходы - с цифровыми входами цифроанйлогового преобразователя 7, выход которого соединен с вычитающим входом элемента 5 сравнения Формирователь 15 импульсов может быть выполнен из конденсатора 17 и резистора 18. Элементы 5, 6, 7, 12, 13, 14, 15, 16 образуют датчик 19 скорости с первым 20 и вторым 21 входами, выходом 22 и делителем напряжения 23. Общая шина 24 соединена с первым выходом усилителя 8 мощности. Цифроаналоговый преобразователь 7 условно показан на фиг 3 в виде резисторов 25, 26, а электродвигатель 1 - в виде резистора 27 и источника 28 величина
которой пропорциональна угловой скорости ротора электродвигателя.
Устройство работает следующим образом.
Требуемый закон вращения ротора электродвигателя 1 задается задатчиком 11. Напряжение с выхода задатчика 11 подается на суммирующий вход измерителя 10 рассогласования, на вычитающий вход которого подается напряжение с датчика 3 положения. Измеритель 10 рассогласования сравнивает эти напряжения и на выходе создает напряжение, пропорциональное их разности, которое задает необходимую скорость вращения электродвигателя 1. С выхода измерителя 10 рассогласования напряжение поступает на первый вход формирователя 9 сигнала управления, на второй вход которого подается напряжение с выхода схемы сравнения 5, пропорциональный фактической скорости вращения электродвигателя 1. С выхода формирователя 9 сигнала управления напряжение, пропорциональное разности между заданной и фактической скоростями вращения ротора электродвигателя 1, подается через усилитель 8 мощности и масштабирующий резистор 6 на обмотку электродвигателя 1. Ротор электродвигателя 1 начинает вращаться и перемещает нагрузку 2. Вращение ротора происходит до тех пор, пока нагрузка 2 не встанет в положение, определяемое задатчиком 11. Как только нагрузка 2 встанет в требуемое положение, обмотка электродвигателя 1 обесточивается Обмотка электродвигателя 1 обесточивается также по сигналу с блока 4 концевых выключателей, если ротор повернется на угол больший,чем допустимо Формирование напряжения пропорционального фактической скорости датчиком 19 скорости происходит следующим образом,
В момент включения формирователь 15 импульса установки формируется импульс, который прикладывается к входу разрешения установки реверсивного счетчика 13. На выходах последнего устанавливаются сигналы, соответствующие сигналам, которые присутствовали на его входах установки. Предварительно при настройке системы входы установки реверсивного счетчика 13 были подключены к общей шине 24 и шине питания таким образом, чтобы при заторможенном роторе электродвигателя 1 напряжение на выходе цифроаналогового преобразователя 7 было равно напряжению на первом выводе электродвигателя 1. При этом напряжение на первом выводе электродвигателя 1 равно
Ui
Us-R
R + Re
где Us - напряжение на выходе усилителя 8 мощности;
Ня -сопротивлениеобмотки якоря электродвигателя 1 (резистор 27) на фиг. 2; Re - сопротивление резистора 6 Напряжение на выходе цифроаналогового преобразователя 7 равно U8-R25
7 R25 + R26
где Ras - сопротивление резистора 25 (фиг. 2);
- сопротивление резистора 26 (фиг. 2).
Соотношение -к-4-- - определяется
К25 г К2б
двоичным кодом, подаваемым на цифровые входы преобразователя 7,
Поскольку коэффициент деления цифроаналогового преобразователя 7 определяется состоянием выходов реверсивного счетчика 13, то, соединяя входы установки последнего с общей шиной (ноль) ил и шиной
питания (единица), добиваются, чтобы . Поскольку оба эти напряжения подаются на входы элемента 5 сравнения, на его выходе напряжение 1), так как оно пропорционально разности напряжений на
его входах.
Выражение справедливо при заторможенном роторе. Предположим, что скорость вращения ротора электродвигателя 1 не равна нулю. При этом на якорной
обмотке электродвигателя 1 появится электродвижущая сила (ЭДС) самоиндукции, равная Ki ft), где Ki - конструктивная постоянная электродвигателя 1;
(г) - скорость вращения ротора. Напряжение U1 на первом выводе электродвигателя 1 станет равным
5
0
Ui
, (Lb - Ki со) RB + Re
-R- -+Kift)
UR
, Re Ki ft)
Тfz -
R + Re Вя
KlG) ..
Обозначив - -Г-FT- -U
R +Re
получим
Ui Ui+Uw . Напряжение на выходе элемента сравнения 5 будет равно U5(Ui + +UW -U7)) Ks, поскольку , где Ks - коэффициент усиления элемента е сравнения 5. Ks выбирается таким образом, чтобы при максимальной заданной скорости ft)max ВЫПОЛНЯЛОСЬ раввНСТВО U5 Ul6max,
где U ютах - максимальное напряжение на выходе измерителя 10 рассогласования. Это условие выполняется при
Uio(max) (Ря 4 Re)
5Ki Umax : Re
При эксплуатации с течением времени, а также в зависимости от температуры окружающей среды значения сопротивлений Яя и Re могут изменяться, что может привести к нарушению равенства между напряжениями Ui и Uy. А это может привести к дополнительной ошибке в работе системы.
Для исключения влияния f изменении значений R8 и R6 на работу системы напряжение Us подается на первый (прямой) вход сигнум- реле, которое выдает О если 1), и 1 если Us S 0, Допустим, . тогда 1 с Сигнум-реле 12 прикладывается к входу направления счета реверсивного счетчика 13 и он работает на суммирование (считает импульсы, приходящие с генератора 14), число,записанное в нем,будет увеличиваться, что приведет к увеличению напряжения Uy на выходе цифроаналогового преобразователя 7. Это, в свою очередь, приведет к уменьшению напряжения Us, так как напряжение U подается на инверсный вход элемента сравнения 5. Так будет продолжаться до тех пор, пока Us станет 0. Это приведет к тому, что U2 станет 0. Реверсивный счетчик 13 станет работать на вычитание. С этого момента число, записанное в нем, будет уменьшаться, напряжение Uy уменьшается, а напряжение Us возрастает (но уменьшается по абсолютной величине). Таким образом, сигнум-реле 12 задает такое направление счета реверсивного счетиика 13, которое устремляет напряжение Us к нулю.
В процессе работы следящей системы направление вращения ротора электродвигателя 1 непрерывно меняется, при вращении в одну сторону , в другую , a поскольку угол поворота ротора ограничен, то за достаточно большой промежуток времени Д t можно считать время, в течение которого он вращался в другую сторону. Следовательно, усредненное значение напряжения Uw за время At равно 0. Или At / . Поэтому содержимое счетчика 13,
о
несмотря на постоянные изменения знака напряжения Us. от этого напряжения зависеть не будет (час гота генератора 14 подбирается такой, чтобы за максимальное время вращения ротора в одну сторону содержимое счетчика 13 изменилось незначительно). Поскольку усредненное значение Uw равно нулю, то содержимое счетчика 13 будет определяться медленно изменяющимися от времени и от температуры значениями Ря и Re. При скорости о О напряжение Us также равно нулю
Таким образом происходит постоянная подстройка тахометрической обратной свя- зи.
Отсутствие в предлагаемой системе датчика скорости как электрической машины позволяет повысить ее быстродействие и точность, так как исключается влияние моментов инерции и трения указанного датчика, прикладываемых к валу электродвигателя. Кроме того, исключается механическая передача от вала электродвигателя к валу датчика скорости, что позволяет умень- шить вес и габариты всего устройства.
Формула изобретения Следящая система с ограниченным углом поворота выходного вала, содержащая
измеритель рассогласования, подключенный суммирующим и вычитающим входами к выходам соответственно задатчика и датчика положения, а выходом - к первому входу формирователя сигнала управления,
вторым входом соединенного с выходом датчика скорости и выходом с информационным входом усилителя мощности, подключенного управляющим входом к выходу блока концевых выключателей, а первым
выходным выводом - к первому выходу якорной обмотки электродвигателя, вал которого кинематически связан с валом нагрузки и с входами датчика положения и блока концевых выключателей обличающ а я с я тем, что, с целью повышения быстродействия и точности системы в ней первый и второй входные выводы датчика скорости подключены соответственно к второму выводу якорной обмотки электродвигателя и к второму выходному выводу усилителя мощности, а датчик скорости содержит источник постоянного напряжения, делитель напряжения, формирователь импульса установки, генератор импульсов,
сигнум-реле, реверсивный счетчик, цифроа- налоговый преобразователь, масштабирующий резистор и элемент сравнения, подключенный суммирующим входом к первому выводу масштабирующего резистора.
вычитающим входом к выходу цифроаналогового преобразователя, а выходом - к входу сигнум-реле, соединенного выходом с входом направления счета реверсивного счетчика, подключенного тактовым входом
к выходу генератора импульсов, входом разрешения установки - к выходу формирователя импульса, установки, входами установки - к выходным выводам делителя напряжения, а выходами - к цифровым входам цифроаналогового преобразователя.
соединенного аналоговым входом с вторым выводом масштабирующего резистора, выход источника постоянного напряжения соединен с входом формирователя импульса установки и с первым входным выводом делителя напряжения, подключенного вторым
О
О
„у, vAW/WV Дл Ь п п п п п т п п wn п г/
о
входным выводом к общей шине системы, причем первый и второй выводы масштабирующего резистора являются первым и вторым входными выводами датчика скорости, а выход элемента сравнения является выходом датчика скорости.
s
Фи&2
| Ахметжанов А | |||
| А | |||
| Высокоточные системы передачи угла автоматических устройств | |||
| - М.: Энергия, 1975, с | |||
| Способ изготовления замочных ключей с отверстием для замочного шпенька из одной болванки с помощью штамповки и протяжки | 1922 |
|
SU221A1 |
| Цифро-аналоговая следящая система | 1981 |
|
SU1029143A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система с ограниченным углом поворота выходного вала | 1986 |
|
SU1339488A1 |
