10
20
11339488
Изобретение относится к автоматие и может быть использовано при упавлении угловым положением различых объектов.
Цель изобретения - расширение дипазона допустимых, углов поворота выодного вала системы и уменьшения . ремени вывода выходного вала систеы из конечных положений в рабочую ону.
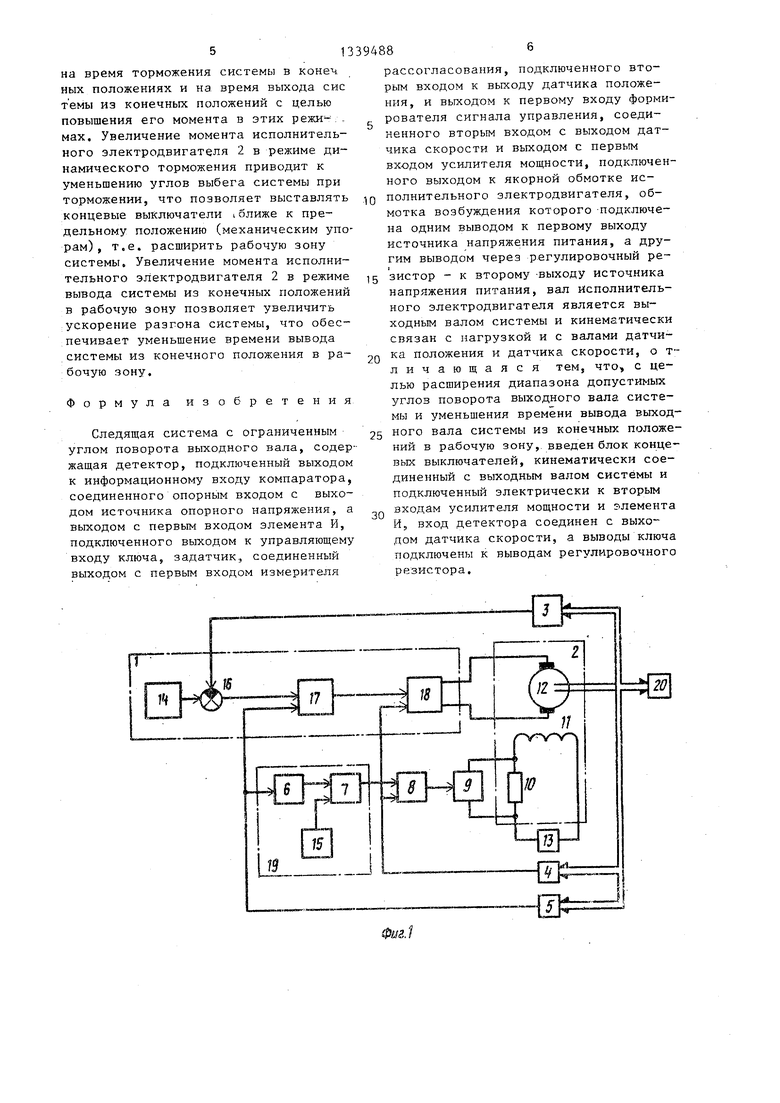
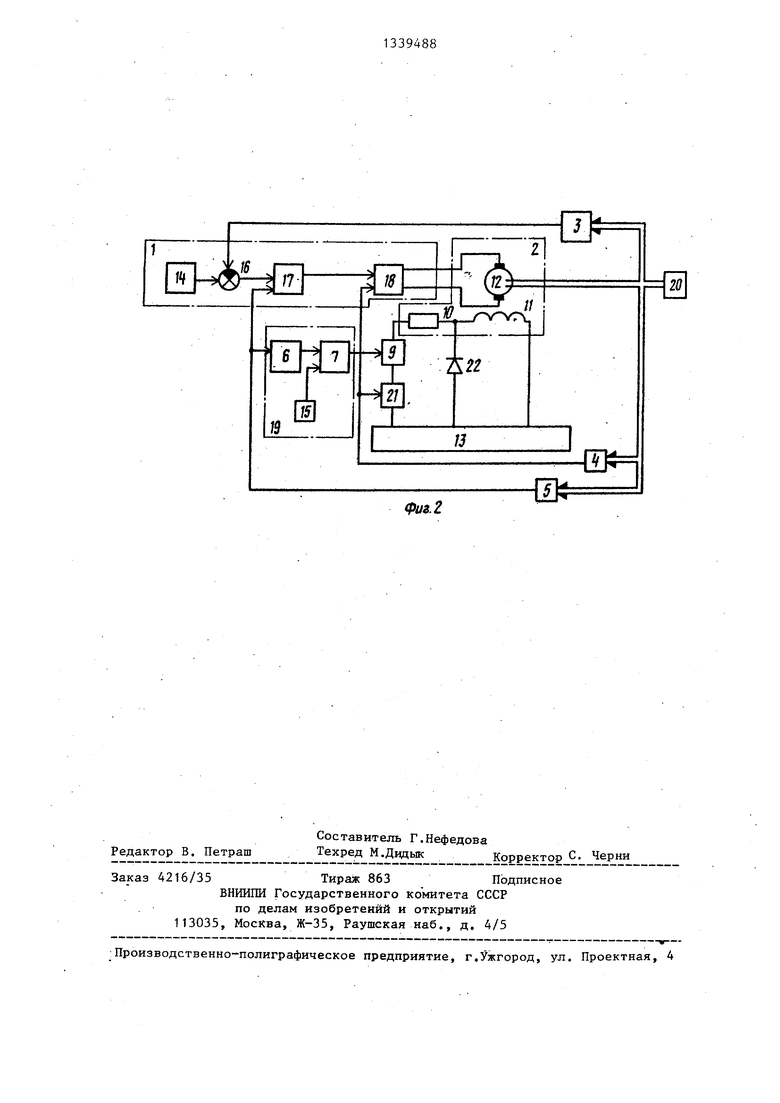
На фиг. 1 представлена, принципильная схема системы; на фиг. 2 - о же, вариант выполнения.
Следящая система содержит блок 1 правления, исполнительный электровигатель 2, датчик 3 положения, блок 4 концевых выключателей, датчик 5 корости, детектор 6, компаратор 7, элемент И 8, ключ 9, регулировочный резистор 10, обмотку 11 возбуждения, якорь 12, источник 13 напряжения питания, задатчик 14, источник 15 опорного напряжения, измеритель 16 рассогласования, формирователь 17 сигнала управления, усилитель 18 мощности., пороговый блок 19, нагрузка 20, ключ 21, диод 22.
В качестве ключей 9 и 21 могут быть применены любые безынерционные ключи. Формирователь сигнала управления реализует любой закон управления .
Система работает следующим образом.
При движении нагрузки 20 в рабочей зоне системы ключ 9 разомкнут, поскольку на вход элемента И 8, управляющего работой ключа. 9,, поступает только выходной сигнал датчика 5 скорости через детектор 6 и компаратор 7, Детектор 6 совместно с компаратором 7, уровень опорного напряжения которого равен нулю, выполняют функцию порогового блока 19, вырабатывающего сигнал о наличии скорости системы, независимо от ее величины и направления. При этом обмотка 11 возбуждения ис.иолнительного эл ектродвигателя 2 оказывается подключенной к источнику 13 напряжения питания через регулировочный резистор 10,величина которого выбирается так, чтобы по обмотке 11 возбуждения протекал номинальный ток возбуждения. Выходной сигнал датчика скорости 5 о.дно- временно поступает на третий информационный вход блока 1 управления для обеспечения устойчивой работы системы.
л ч и н н ч х м 15 И т л м 25 в .л
30
35
40
45
50
55 к
0
0
При подходе системы к конечным положениям срабатывают концевые выключатели блока 4 концевых выключателей и сиг нал с выхода блока 4 поступает на управляющий вход блока 1 управления,переводя систему в режим динамического торможения, например, путем замыкания якорной обмотки исполнительного электродвигателя 2 на резис- . тор динамического торможения или выходное сопротивление усилителя 18 мощности и, кроме .того, на второй, вход элемента ИВ. При этом элемент 5 И 8 вырабатывает сигнал, который поступает на управляющий вход ключа 9. Последний замыкается и шунтирует регулировочный резистор. 10, подключая обмотку 11 возбуждения исполнительного электродвигателя 2 непосредственно к источнику 13 напряжения питания, осуществляя тем самым форсировку тока (потока возбуяздения) в обмотке 11 воз- возбуждения. Поскольку момент, разви- 5 ваемый исполнительным электродвигате- ем 2 постоянного тока,пропорциона- .лен потоку возбуждения (току возбуж дения), то его тормозной момент, а следовательно угол торможения системы, который обратно пропорционален моменту исполнительного электродвигателя 2, уменьшится.. По окончании процесса торможения и остановке системы Е конечном положении сигнал на выходе датчика 5 скорости равен нулю, В результатте этого сигнал на выходе элемента И 8 пропадает, ключ 9 размыкается и вновь подключает обмотку 11 возбуждения к источнику 13 напряжения питания через регулировочный резистор 10, обеспечиваягтем самым нормальное, возбуждение исполнительного электродвигателя 2.
0
5
0
При выходе системы из конечного положения в рабочую зону блок 1 управления отключает режим динамического торможения. На якоре 12 исполнительного электродвигателя 2 появляется напряжение, и он начнет вращаться в сторону выхода в рабочую зону.Одновременно начинает вращаться датчик 5 скорости,, и на выходе компаратора 7 появляется сигнал, который поступает на первьш вход элемента И.8 Пос- кольку в конечном положении блок 4 концевых выключателей срабатывает, на втором входе элемента И 8 также присутствует сигнал. Элемент И 8 срабатывает, и си1 нал -с его выхода пос31
тупает на вход ключа 9, Последний замыкается, шунтирует регулировочный резистор 10 и вновь подключает обмотку 11 возбуждения исполнительного
электродвигателя 2 непосредственно к источнику 13 напряжения питания, форсируя тем самым поток возбуждения исполнительного электродвигателя 2. Ег пусковой момент увеличивается, а еле ;довательно, и увеличивается ускорени разгона системы, что обеспечивает более быстрый выход из конечного положения в рабочую зону.
При сходе системы с концевых вык- лючателей сигнал с выхода блока 4 концевых выключателей пропадает, в результате чего пропадает сигнал на выходе элемента И 8. Ключ 9 размыкается и подключает обмотку 11 возбуж- дения к источнику 13 напряжения питания через резистор 10, обеспечивая тем самым номинальное возбуждение исполнительного электродвигателя 2 при нахождении в рабочей зоне.
Рассмотрим эффект, получаемый при форсировке возбуждения исполнительного электродвигателя 2 в режиме динамического торможения. Известно, что момент, развиваемый исполнительным электродвигателем 2 постоянного тока, может быть записан в виде:
М К„ ( I,
(1)
где М - момент электродвигателя 2; К„ - коэффициент пропорциональности, зависящий от конструкции электродвигателя 2; .1 - ток в якорной цепи. С другой стороны уравнение равновесия моментов на валу исполнительного электродвигателя 2 без учета моментов сил статических сопротивлений имеет вид:
М I, 7Гd dt
(2)
где I - суммарный момент инерции
якоря 12 и нагрузки, приведенный к валу электродви- гателя 2;
СО - угловая скорость электродвигателя. 2.
Пренебрегая индуктивностью якорной обмотки, которая, как правило, мала, уравнение напряжений в якорной цепи исполнительного электродвигателя 2 в режиме динамического торможения можно записать:
- IR,
(3)
где К(д - коэффициент противоЭДС;; R - суммарное сопротивление
якорной цепи.
Определив из уравнений (1) и (2) ток I в якорной цепи, после подстановки его выражения в (3) и преобразований получим уравнение, описывающее .процесс торможения системы:
т„ .«
dt
0.
(А)
яе-1
М-... V«
электромеханическая постоянная времени системы,
Интегрируя уравнение (4) по времени дважды при начальных t(0) 0; со(0) СОо ; ff(0) О, получим выражение для угла торможения системы
i.
4 - е ). (5)
0
5
0
5
Анализ выражения (5) с учетом выражения Т показывает, что угол торможения системы пропорционален электромеханической постоянной времени системы, которая, в свою очередь, обратно пропорциональна величине потока возбуждения исполнительного электродвигателя 2 (току возбуждения электродвигателя 2). Таким образом, форсируя, например, поток возбуждения исполнительного электродвигателя 2 в два раза, можно уменьшить угол выбега системы в два раза и существенно расширить рабочую зону системы.
Считая, что разгон исполнительного электродвигателя 2 при выходе системы из конечного/ положения в рабочую зону осуществляется постоянным моментом, время выхода системы в рабочую зону может быть вычислено по формуле
где 6 - ускорение разгона.
Тогда при форсировке потока возбуждения исполнительного электродвигателя 2 в два раза время выхода системы иа конечного положения в рабочую зону уменьшится тоже в два раза.
Таким образом, в предлагаемой следящей системы обеспечивается автоматическая форсировка возбуждения исполнительного электродвигателя 2
51339488
емя торможения системы в конеч оложениях и на время выхода сие из конечных положений с целью ения его момента в этих режи- , Увеличение момента исполнительэлектродвигателя 2 в режиме диеского торможения приводит к шению углов выбега системы при
ра ры ни ро не чи вх но по мо на ис ги зи н н х с к л л м н н в п в п
торможении, что позволяет выставлять концевые выключатели iближе к предельному положению (механическим упорам) , т.е. расширить рабочую зону системы. Увеличение момента исполнительного электродвигателя 2 в режиме вывода системы из конечных положений в рабочую зону позволяет увеличить ускорение разгона системы, что обеспечивает уменьшение времени вывода системы из конечного положения в рабочую зону.
Формула изобретения
Следящая система с ограниченным углом поворота выходного вала, содержащая детектор, подключенный выходом к информационному входу компаратора, соединенного опорным входом с выходом источника опорного напряжения, а выходом с первым входом элемента И, подключенного выходом к управляющему входу ключа, задатчик, соединенный выходом с первым входом измерителя
5
0
Q
5
0
рассогласования, подключенного вторым входом к выходу датчика положения, и выходом к первому входу формирователя сигнала управления, соединенного вторым входом с выходом датчика скорости и выходом с первым входом усилителя мощности, подключенного выходом к якорной обмотке исполнительного электродвигателя, обмотка возбуждения которого -подключена одним выводом к первому выходу источника напряжения питания, а другим выводом через регулировочный резистор - к второму -выходу источника напряжения питания, вал исполнительного электродвигателя является выходным валом системы и кинематически связан с нагрузкой и с валами датчика положения и датчика скорости, о т- личающаяся тем, что, с целью расширения диапазона допустимых углов поворота выходного вала системы и уменьшения времени вывода вьпсод- ного вала системы из конечных положений в рабочую зону, введен блок концевых выключателей, кинематически соединенный с выходным валом системы и подключенный электрически к вторым входам усилителя мощности и элемента И, вход детектора соединен с выходом датчика скорости, а выводы ключа подключены к выводам регулировочного резистора.
Фи8.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU612203A1 |
| Следящая система с ограниченным углом поворота выходного вала | 1989 |
|
SU1783469A1 |
| Электропривод постоянного тока | 1984 |
|
SU1229936A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ СТУПЕНЧАТОЙ ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2259505C1 |
| Электропривод стола тяжелого продольнообрабатывающего станка | 1976 |
|
SU736314A1 |
| Многоканальный электропривод | 1984 |
|
SU1233257A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ | 2002 |
|
RU2227960C1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| Электропривод подъемной машины | 1980 |
|
SU893780A1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
Изобретение относится к астро- технике и может быть использовано при управлении углом поворота оптических телескопов и антенн радиотелескопов. Целью изобретения являются расширение зоны рабочих углов системы и уменьшение времени вывода системы из конечных положений в рабочую зону. Поставленная цель достигается за счет того, что в момент выхода системы на упоры срабатывают концевые выключатели блока концевых выключателей и на его выходе формируется сигнал, осуществляющий переключение регулятора на режим динамического торможения, например, путем замыкания якорной обмотки электродвигателя на резистор динамического торможения. Кроме того, резистор в цепи обмотки возбуждения шунтируется ключом, который срабатывает при наличии сигнала на выходе блока концевых выключателей и при отличии скорости вращения двигателя от нуля, осуществляя тем самым форси- ровку потока возбуждения электродвигателя. 2 ил. W САР |) 4 00 00
Редактор В. Петраш
Составитель Г.Нефедова .fl44biK Корректор С,
Заказ 4216/35Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
:Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
| СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU304551A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1976 |
|
SU611177A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1978 |
|
SU746406A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
