Изобретение относится к области подводного аппарэтоСтроения и может использоваться для разведки, добычи, погрузки и транспортировки на поверхность геолого- минералогических, биологических и других ресурсов со дна морей и океанов.
Известно устройство для разработки полезных ископаемых морей и океанов, состоящее из плавсредства, имеющего замкнутый тяговый элемент, несущий ковши и образующий на дне свободно перемещающуюся петлю (патент Великобритании № 1239178). Недостатком этого устройства является то, что ковши, свободно перемещающиеся по дну имеют низкий коэффициент заполнения и тенденцию к переворачиванию в зоне захвата, что снижает производительность работы устройства.
Известна также установка для разработки конкреций, илов и россыпей со дна морей и океанов, состоящая из плавсредства, имеющего замкнутый элемент и несущий исполнительные органы (ковши), Элемент огибает по направляющей в виде барабана роликами-раму, установленную на салазках и транспортируемую с помощью плавсредства канатом (патент США № 3943644). Получающиеся при работе данного устройства необработанные полосы дна связаны с ограниченными навигационными возможностями плавсредства в моменты изменения курсов при заходах на новые полосы. Необработанные полосы получаются из-за невозможности перемещения рамы таким образом, чтобы она каждый раз опускалась рядом с уже отработанной полосой дна моря.
Известен автоматический самодвижущийся подводный аппарат (патент ФРГ N° 2919444) для сбора, погрузки и транспортировки на поверхность конкреций, а также для глубоководного рыболовства и для поднятия затонувших предметов, выбранный нами в качестве прототипа.
Аппарат состоит нескольких отдельных отсеков, содержит устройство для движения вперед, для парения над грунтом, погрузочно-разгрузочное устройство. Нижняя часть корпуса имеет по периметру гибкое ограждение из злластичной пластмассы, заключающее в себе некоторый объем воды, находящийся по отношению к наружной воде под небольшим избыточным давлением, благодаря чему образуется подъемная сила, которая поддерживает аппарат над грунтом в состоянии парения. Из- быточное давление внутри гибкого ограждения пот/чается за счет напора, создаваемого центробежным насосом. Погрузочно-разгрузочное устройство аппарата в
своей верхней части через концентрическую крышку соединено с нагнетающей стороной центробежного насоса, с другой стороны насос имеет отверстие заканчивающееся зубьями, шипы которых перекрыты сверху плитой, подвижной вокруг горизонтальной оси и имеющей явно выраженный пилообразный профиль. Образуемые им ступени приводят всасываемую насосом во0 ду в вихревое движение относительно морского дна, чтобы усилить процесс отделения комьев, который уже начался благодаря протеканию находящейся под давлением воды из-под гибкого ограждения между ши5 пами зубьев.
Основным недостатком устройства является низкая производительность QK (кг.) его работы, которую можно оценить соотношением
0Q f qK (So - Sn), 0 f 1,
где QK (кг/м ) - урожайность конкреций,
So - полная обработанная за время t площадь морского дна,
Sn - суммарная площадь пропущенных
5 полос за это же время%
f - коэффициент чистоты обработки поверхности, показывающий долю собранных конкреций qKc от их урожайности QK и зависящий от состояния морского дна с кон0 крецмями и от выбранного механизма отрыва конкреций or дна.
Главными причинами низкой производительности QK устройства является сравнительно узкая полоса захвата обраба5 тываемой поверхности (большая площадь Sn) и слабое силовое воздействие на конкреции (особенно крупные) в процессе их отрыва от дна, небольшой коэффициент f чистоты обработки.
0 Целью изобретения является повышение эффективности подводного аппарата путем увеличения полосы захвата железо- марганцевых конкреций и усиления струйного воздействия на них.
5 Поставленная цель достигается тем, что в подводном аппарате, содержащем корпус, систему динамического поддержания и перемещения аппарата, включающую в себя нагнетатель с приводом и эластичное ог0 раждение, установленное в нижней части аппарата, по периметру нагнетателя, устройство сбора донных отложений железо- марганцевых конкреций в составе водозаборника, соединенного с погрузо5 разгрузочным модулем, установленным в грузовом отсеке, водозаборник выполнен в виде полого вала, а нагнетатель - в виде ротора, лопасти которого размещены между полым валом и коаксиальной с ним обшивкой грузового отсека под погрузо-разгрузочным модулем, выполнен в виде диска, по периметру которого закреплены кольцевые направляющие с грузами, установленными с возможностью перемещения по направляющим, привод нагнетателя выполнен в виде погружного электродвигателя, статор которого размещен на внутренней обшивке грузового отсека, а ротор выполнен 6 виде бандажа на лопастях нагнетающего устройства, причем эластичное ограждение выполнено гофрированным
Предлагаемый аппарат отличается от прототипа тем, что
-водозаборник выполнен в виде полого вала, а нагнетатель - в виде ротора, лопасти которого размещены между полым валом и коаксиальной с ним обшивкой грузового отсека под погрузо-разгрузочным модулем, на наружной поверхности которого выполнены жалюзи;
-корпус выполнен в виде диска и по его периметру закреплены кольцевые направляющие с грузами, установленными с возможностью перемещения по направляющим;i.t
-привод нагнетателя выполнен в виде погружного электродвигателя, статор которого размещен на внутренней обшивке грузового отсека, а ротор выполнен в виде бандажа на лопастях нагнетающего устройства;
-эластичное ограждение выполнено гофрированным
Данные отличительные признаки отсутствуют в прототипе и неэквивалентны его признакам. Отсюда следует, что заявляемое техническое решение соответствует критерию новизна.
В предлагаемом аппарате водозаборник выполнен в виде полого вала, а нагнетатель - в виде ротора, вращающегося внутри грузового отсека вокруг полого вала, что позволяет создавать внутриэлластично- го ограждения мощные вертикальные и горизонтальные потоки, отделяющие от Дна и втягивающие внутрь полого вала конкреции. Жалюзи предназначены для еще большего усиления общего потока через грузовой отсек и одновременной очистки конкреций от иловых частиц
Применение указанных признаков для выполнения вышеназванных функций в аппаратах подобного назначения авторам не известно.
Дисковидная форма подводного аппарата была использована с целью придания аппарату значительной маневренности, что усиливает степень чистоты обработки поверхности, а также для облегчения управления аппаратом за счет равенства
сопротивлений корпуса аппарата при различных направлениях обтекания водной средой дисковидного корпуса
Дисковидная форма в аппаратострое- нии известна
Крено-дифферентная система, которая состоит из кольцевых направляющих с грузами, установленными с возможностью перемещения по направляющим по заданной
программе, расположена по периметру ПА и позволяет производить крен аппарата в любом заданном направлении Такое выполнение крено-дифферентной системы в сочетании с дисковидной формой аппарата
позволяет по сравнению с известными подводными аппаратам значительно повысить маневренность и управляемость аппаратом, так как оператору для измен ения ско- рости и курса необходимо управлять только
крено-дифферентной системой и, кроме то го, аппарату не требуется производить развороты по курсу Применение подобного признака в подводном аппаратостроении авторам не известно
Привод нагнетателя выполнен в виде погружного электродвигателя; статор размещен на внутренней обшивке грузового отсека, ротор выполнен в виде бандажа на лопастях нагнеТаЧо щегТЯ/стр ойства Приводигся ротор во вращение за счет бегущ го по силовым обмоткам магнитного поля В аппаратах подобного назначения данный признак не применялся
В предлагаемом аппарате нижняя часть
его секции-подборщика имеет гибкое эластичное гофрированное ограждение, заклю- чающее в себе некоторый объем жидкости при давлении избыточном по отношению к забортной воде, благодаря чему возникает
подъемная сила, поддерживающая аппарат над грунтом в состоянии парения Упруго- гофрированные свойства элластичного ограждения Позволяют сохранить избыток давления внутри ограждения за счет плотного прилегания эластомера к дну Эластичное ограждениеBbTfioTitfeHO гофрированным для более плотного прилегания его к грунту в случае крена или наезда на неровности дна Использование подобного признака с
таГкой же целью в аппаратах того же назначения неизвестно.
В целом, использование вышеперечисленных признаков в но вой совокупности обеспечивает аппарату лучшую управляемость и маневренность п о сравКенГию с из- вестными аппаратами, значительно возрастает эффективность сбора конкреций, то есть увеличивает производитель- Лость работы аппарата Этого не
обеспечивает ни один из отдельно взятых признаков. Следовательно, техническое решение задачи соответствует критерию существенные отличия.
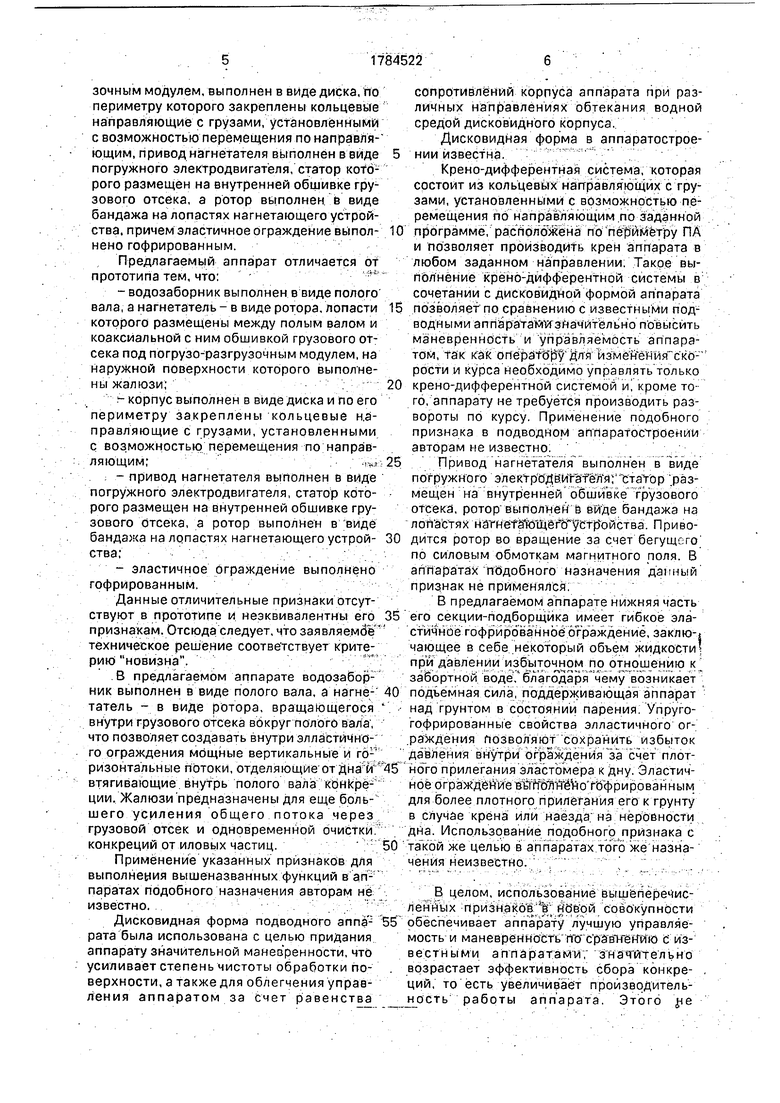
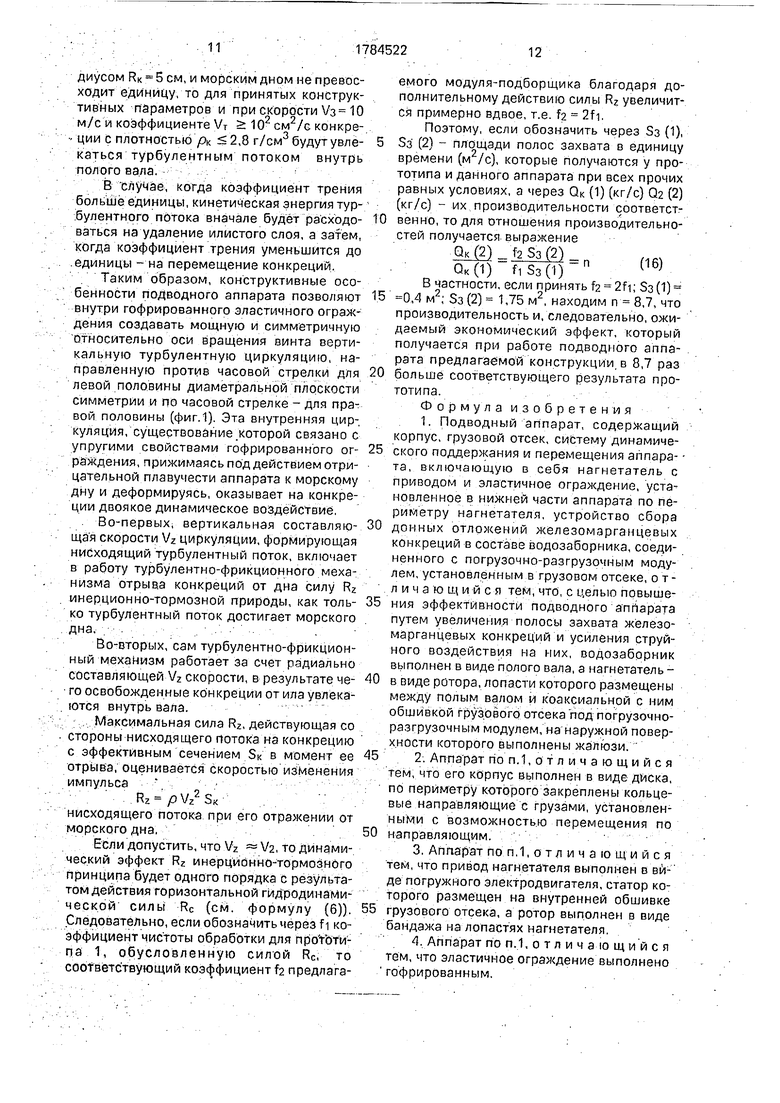
Сущность изобретения поясняется чер- тежами, на которых представлены продольный разрез аппарата (фиг.1) и вид сверху (фиг.2).
Корпус 1 автоматического самодвижущегося подводного аппарата состоит из расположенных вокруг грузового отсека 2 технических отсеков 3, 4, 5. Грузовой отсек 2 представляет собой полый цилиндр с расположенным внутри него погрузочно-раз- грузочным модулем 6, внутри которого размещен полый вал 7, под погрузочно-раз- грузочным модулем на опорном узле 8 подвешен ротор 9, состоящий из ярма ротора 10 и лопастей 11. Над верхним торцом полого вала 7 расположен регулировочный кла- пан 12, ниже верхнего торца полого вала расположена мембрана 13, на наружней части корпуса погрузочно-разгрузочного модуля 6 выполнены жалюзи 14. Вокруг грузового отсека 2 по периметру размещена кольцевая направляющая 15 с крено-диф- ферентными массами 16, 17, а также установлены силовые обмотки 18. К нижней части грузового отсека 2 прикреплено Злла- стичное гофрированное ограждение 19.
Аппарат работает следующим образом: после опускания за борт аппаратуру придается отрицательная плавучесть, раскручивается силовыми обмотками 18 ротор .11, при этом клапан 12 закрыт, аппарат начинает погружение путем изменения величины угловой скорости винта 3. При подходе к заданной точке морского дна гофрированное ограждение-19 прилегает к дну, крено-диф- ферентная система наклоняет, за счет перемещения масс 16 и 17 по направляющей 15, корпус аппарата в заданном направлении и путем изменения угловой скорости вращения ротора 11 и угла наклона корпуса - аппарат начинает движение вдоль дна. В зависимости от размера конкреций, подаваемых всасывающим потоком в погрузочно- разгрузочный модуль б, регулируется величина приоткрывания клапана 12. Погру- зочно-разгрузочный модуль 6 разделен диафрагмой 13, позволяющей по мере его загрузки регулировать плавучесть аппарата за счет выдавливания загруженными конкрециями инертного наполнителя находяще- гося в задиафрагменном пространстве. Во время вращения ротора вдоль погрузочно- разгрузочного модуля проходитмощный поток воды, который через жалюзи 14 отсасывает илистые отложения попадающие в погрузочно-разгрузочный модуль вместе с конкрециями. При полной загрузке поступает на судно сигнал и оператор подает команду на всплытие.
Для изучения внутренней динамики модуля подборщика (МП), принимаются следующие допущения:
а)движение баротропной несжимаемой
идеальной жидкости стационарно -(-тг 0);
б)массовые силы имеют потенциал Ф. В таком случае вдоль трубки тока сохраняются следующие величины
Sn Vn const, n 1,2(1)
P+ const,(2)
где Sn, Vn - поперечное сечение трубки тока и средняя по сечению продольная составляющая скорость потока Р, р - давление и плотность жидкости.
Соотношения (1), (2) являются следствием законов сохранения вещества (уравнение неразрывности для несжимаемой жидкости) и энергии (интеграл Бернулли). Если трубка тока находится в поле силы тяжести д, то Ф gZ.
Применяя соотношения (1), (2) для нашей задачи, имеем
SiVi $2 V2 S3V3 const,(3)
л
PQ+ /ogH0K Pi + Јy-+/ogH
2 (Н-п2). (4)
Следует заметить, что во-первых, соотношения 1-2 справедливы и для изотропного турбулентного движения, т.к. соответствующие уравнения Рейнольдса для осредненного движения формально совпадают с соответствующими уравнениями Навье-Стокса и, во-вторых, при написании уравнения (4) предполагалось, что трубка тока начинается на поверхности океана, причем сама поверхность океана является сечением трубки тока с нулевой скоростью. В этом случае коэффициенты /м, VM молекулярной вязкости (если таковые содержатся в уравнениях) заменяются соответствующими коэффициентами ty. VT турбулентной вязкости.
Принцип действия МП следующий: вращающийся винт создает турбулентный поток жидкости Q ViSi, направленный вертикально вниз и образующий трубку тока с сечениями
Я гч ,.2
3(lV-Diz) яОзН лгОз2
(5)
На участке пути SiS2 скорость турбулентного потока изменяется от значения Vi Уз
S3/S1 ДО V2 V3S3/S2 ЕСЛИ , ТО
V2 Vi и, следовательно, движение жидкости при подходе к ЖМК будет происходить с ускорением. Для того, чтобы ЖМК поднимались турбулентным потоком вверх по трубе 8283, необходимо следующее динамическое условие
оУч2 Рс-СкЈ -8к Рк /ЗкдУк.(6)
согласно которому суммарная сила RC турбулентного гидродинамического сопротивления должна быть больше веса Рк конкреций.
Здесь: Ск - коэффициент сопротивления конкреций, РК , УК, SK - плотность, объем и эффективное сечение конкреций.
Взятые пробы конкреций говорят о том, что и они имеют форму, близкую к сфере с характерным радиусом RK 5-8 см., и плотностью /Эк 2,8 г/см
Условие (6) при помощи характерной скорости
V
V 2 Р
V,
скр8к -
можно переписать в более простой форме V3 У (8).
Полагая для примера (в CgS) RK 5 см, рк - 2,8 г/см, Ск 1, находим V 2 м/с.
Согласуем коэффициент Ск сопротивления со степенью изотопной турбулентности, отождествляя силу Rc сопротивления с силой Стокса
Fc 6 лгРк/эп Уз
для турбулентной среды В таком случае для v имеем
1 г СкУзКк VT
или, подставляя численные значения параметров, VT 10 см/с.
Для сравнения отметим, что кинематический коэффициент океанической турбулентности имеет значения VT 102-107 см2/с.Следовательно, если кинематический коэффициент турбулентности, обусловленный работой вихревого движителя внутри МП, больше VT , то при попаданий в канал 8283 конкреция весом Рк будет увлекаться потоком Оз УзЗз.
Очевидно, что для попадания конкреций внутрь полого вала 8283, в свою очередь, необходимо условие У2 Уз, которое при помощи уравнений (3) перепишется в
Q
виде 5з 82, т.к. У2 Уз - Учитывая, что
Sa
83
л:0з
, 82 яОзЬ1, из последнего неравен тва следует условие 83 82
Рз 4hi
или
Оз 5:4 hi 0з.
Далее, для обеспечения движения жидкости в указанном на рис.1 направлении необходим избыток ДР1з Pi-Рз давления во входном сечении над давлением Рз в сечении 8з, расположенном на выходе жидкости, т.е,
APi3 Pi-P3 Ј -(l-)-pgh2 О
(11)
Это свойство, вытекающее из уравнений (3), (4), конструктивно можно учесть условиями
0
8з
1 2 д h2
Уз
(12)
8ИУ2
Наконец, найдем давление Рч, Р2, Рз в сечениях Si, S2, 83, в соответственно в рабочем состоянии, когда глубина океана равна Н0к Используя цепочку равенств (4), имеем
25
Pi Pa+ рд(Нок-Н)
/оУз: 2
S3J Sr
РЗ Pi - Д Р13 Pi, Р2 Pi + Д Р21, (13)
V22 2
где ДР21 /ogH -И
(1-Sl Si2 S22
)
30 Видим, что при соблюдении условия (В, 11) давление вдоль трубки тока распределяется так, что Рз PL причем избыток внешнего придонного гидростатического давления по сравнению с внутренним дав35 лением Р2 определяется величиной
oVo2 PQ + р дНок - Р2 Д Ранешн Для расчетов эффективности работы предлагаемого подводного аппарата ис- 40 пользовались следующие численные значения параметров (b S1)1
р 1025 кг/м3, DI 0,9 м., D2 1,5 м„ Оз 0,1 м., Н 0,42м . hi 0,06 м.,Н2 0,15 м., Н 2000-4000 м.
45 в таком случае последовательно находим. Si 1,13 м2, 32 0,0188м2, 5з 0,0078 м2, V2 2,5 м/с, V3 6,0 м/с, Vi 0,0417 м/с (15)
APi3 Pi - Рз 0,168 кг/см2, ДР21 50 р2-р1 0,01 кг/см2.
Для hi 0,1 м соответственно имеем: S2 0,0314 м2, У2 1,5 м/с. Таким образом, при изменении зазора . hi между нижним торцом вала и морским 55 дном в интервале 6-10 см. скорость V2 обтекания конкреций изменяется от 2,5 м/с до 1,5м/с.
Следовательно, если коэффициент трения между конкрециями с характерным радиусом RK 5 см, и морским дном не превосходит единицу, то для принятых конструктивных параметров и при скорости Уз 10 м/с и коэффициенте VT 10 см /с конкреции с плотностью рк 2,8 г/см3 будут увлекаться турбулентным потоком внутрь полого вала.
В случае, когда коэффициент трения больше единицы, кинетическая энергия турбулентного потока вначале будет расходоваться на удаление илистого слоя, а затем, когда коэффициент трения уменьшится до единицы - на перемещение конкреций.
Таким образом, конструктивные особенности подводного аппарата позволяют внутри гофрированного эластичного ограждения создавать мощную и симметричную относительно оси вращения винта вертикальную турбулентную циркуляцию, направленную против часовой стрелки для левой половины диаметральной плоскости симметрии и по часовой стрелке - для правой половины (фиг.1). Эта внутренняя циркуляция, существование .которой связано с упругими свойствами гофрированного ограждения, прижимаясь под действием отрицательной плавучести аппарата к морскому дну и деформируясь, оказывает на конкреции двоякое динамическое воздействие,
Во-первых, вертикальная составляющая скорости Vz циркуляции, формирующая нисходящий турбулентный поток, включает в работу турбулентно-фрикционного механизма отрыва конкреций от дна силу R2 инерционно-тормозной природы, как только турбулентный поток достигает морского дна.
Во-вторых, сам турбулентно-фрикционный механизм работает за счет радиально составляющей Vz скорости, в результате чего освобожденные конкреции от ила увлекаются внутрь вала.
Максимальная сила RZ, действующая со стороны нисходящего потока на конкрецию с эффективным сечением SK в момент ее отрыва, оценивается скоростью изменения импульса
Rz /OVz2SK
нисходящего потока при его отражении от морского дна,
Если допустить, что Vz Va, то динамический эффект Rz инерционно-тормозного принципа будет одного порядка с результатом действия горизонтальной гидродинамической силы Rc (см. формулу (б)). Следовательно, если обозначить через f 1 коэффициент чистоты обработки для прототипа 1, обусловленную силой Rc, то соответствующий коэффициент h предлага5
0
п
(16)
емого модуля-подборщика благодаря дополнительному действию силы Rz увеличится примерно вдвое, т.е. h 2fi.
Поэтому, если обозначить через 5з (1),
5з (2) - площади полос захвата в единицу времени (м2/с), которые получаются у прототипа и данного аппарата при всех прочих равных условиях, а через QK (1) (кг/с) Q2 (2) (кг/с) - их производительности соответст0 венно, то для отношения производительно- стей получается выражение QK (2) f2 Зз (2)
Ок(1) fiS3(1) В частности, если принять Ь. 2fi; 83 (1)
5 0,4 м2; Зз (2) 1,75 м2, находим п 8,7, что производительность и, следовательно, ожидаемый экономический эффект, который получается при работе подводного аппарата предлагаемой конструкции в 8,7 раз
0 больше соответствующего результата прототипа.
Формула изобретения 1. Подводный аппарат, содержащий корпус, грузовой отсек, систему динамического поддержания и перемещения алпара- та, включающую в себя нагнетатель с приводом и эластичное ограждение, установленное в нижней части аппарата по периметру нагнетателя, устройство сбора донных отложений железомарганцевых конкреций в составе водозаборника, соединенного с погрузочно-разгрузочным модулем, установленным в грузовом отсеке, отличающийся тем, что, с целью повыше5 ния эффективности подводного аппарата путем увеличения полосы захвата железо- марганцевых конкреций и усиления струйного воздействия на них, водозаборник выполнен в виде полого вала, а нагнетатель 0 в виде ротора, лопасти которого размещены между полым валом и коаксиальной с ним обшивкой грузового отсека под погрузочно- разгрузочным модулем, на наружной поверхности которого выполнены жалюзи.
5 2. Аппарат по п.1, о т л и ч а ю щ и и с я тем, что его корпус выполнен в виде диска, по периметру которого закреплены кольцевые направляющие с грузами, установленными с возможностью перемещения по
0 направляющим.
3.Аппарат по п.1, от л и ч а ю щ и и с я тем, что привод нагнетателя выполнен в виде погружного электродвигателя, статор которого размещен на внутренней обшивке
5 грузового отсека, а ротор выполнен в виде бандажа на лопастях нагнетателя.
4.Аппарат по п.1, о т л и ч а ю щ и и с я тем, что эластичное ограждение выполнено
гофрированным.
115
ft
J


| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ | 2000 |
|
RU2167787C1 |
| УСТРОЙСТВО ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 1991 |
|
RU2032030C1 |
| ПОДВОДНЫЙ ТРАСПОРТНЫЙ КОМПЛЕКС | 2007 |
|
RU2356779C2 |
| РУСЛОВАЯ ГИДРОЭЛЕКТРОСТАНЦИЯ РУССКОГО ИНЖЕНЕРА ЖЕЛЕЗНЯКОВА СЕРГЕЯ ТИМОФЕЕВИЧА | 2013 |
|
RU2557836C2 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| МНОГОЦЕЛЕВОЕ СУХОГРУЗНОЕ СУДНО | 2005 |
|
RU2297942C2 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ РАССРЕДОТОЧЕННЫХ ПО МОРСКОМУ ДНУ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2022 |
|
RU2788227C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| ПРЯМОТОЧНАЯ МНОГОСТУПЕНЧАТАЯ ГИДРОТУРБИНА | 2007 |
|
RU2352783C1 |
| ПОДВОДНЫЙ АППАРАТ ПОВЫШЕННОЙ МАНЕВРЕННОСТИ | 2014 |
|
RU2547102C1 |

Изобретение относится ч области судостроения. Целью изобретения является повышение эффективности подводного аппарата путем увеличения полосы захвата железомарганцевых конкреций и усиления струйного воздействия на них. Цель изобреJX / О х-ХСП-/ тения достигается тем, что корпус 1 подводного аппарата выполнен в виде диска с гофрированным ограждением 19, водоза- борник 7 выполнен в виде полого вала, а нагнетатель - в виде ротора 9, лопасти которого размещены между валом и обшивкой грузового отсека 2, при этом статор нагнетателя 18 размещен на внутренней обшивке грузового отсека, а ротор выполнен в.виде бандажа 10 на лопастях нагнетателя. Горизонтальное перемещение происходит за счет наклонения аппарата крено-дифферен- тной системой в виде грузов, размещенных с возможностью перемещения по направляющим 15, установленным по периметру корпуса аппарата. 3 з.п. ф-лы. 2 ил. / О -/ с Ё ч 00 . 01 го ю
Фиг. Z
| Патент ФРГ Мг 2919444 | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
