Изобретение относится к сельскохозяйственному машиностроению, к машинам для уборки клубнекорнеплодов, а именно к копателям, комбайнам, транспортерам-перегрузчикам и др , обеспечивающим выкапывание и перегрузку картофеля, сахарной и кормовой свеклы и т п
Наиболее близким по своему техническому решению к предлагаемому механизму является механизм 1
Недостатком этого механизма является одинаковая скорость перемещения тяговых элементов в прямом и обратном направлениях.
В практике часто требуются такие механизмы, у которых перемещение тяговых элементов в одном направлении, прямом, должно быть быстрым, а в другом, обратном, в зависимости от технологических требований работы управляемой машины замедленным в несколько раз
Например, опускание выгрузных тор- цев бункеров-накопителей и транспортеров-укладчиков копателей, заполненных
клубнекорнеплодами, должно быть плавным и с постоянной скоростью, в 15-20 раз меньшей, чем подъем и опускание этихтор- цев без клубнекорнеплодов
Целью изобретения является расширение эксплуатационных возможностей механизма
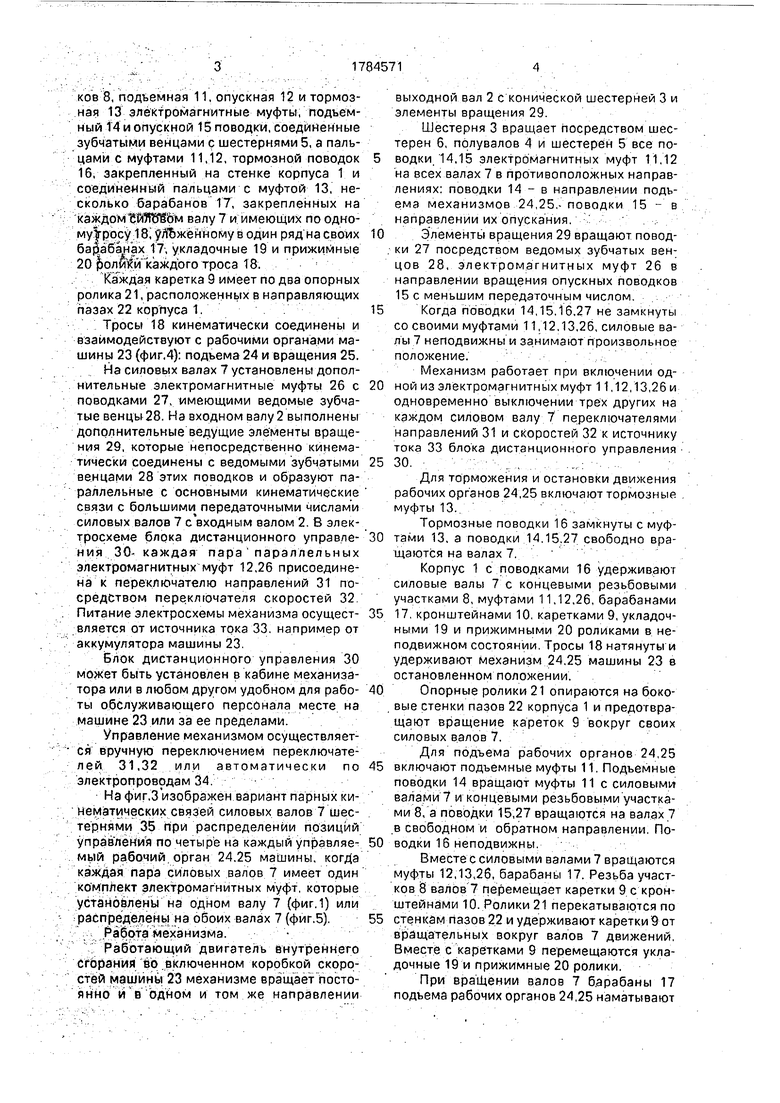
На фиг.1 изображены принципиальные кинематическая и электрическая схемы механизма на фиг.2 - разрез Б-Б на фиг 1, на фиг.З - разрез В-В на фиг 1; на фиг.4 - вид А на фиг 1; на фиг.5 - сечение Д-Д на фиг 1
Механизм содержит коробчатый корпус 1, в котором смонтированы входной вал 2 с конической шестерней 3, два приводных полувала 4 с закрепленными на них по одной цилиндрической 5 и одной конической 6 шестернями, причем конические шестерни 3,6 соединены между собой, несколько силовых валов 7, на каждом из которых имеется по два концевых участка 8 с ходовой резьбой, по одной укладочной каретке 9, соединенной и взаимодействующей своими кронштейнами 10 с резьбой концевых участсл С
xi
00
ел
VJ
ков 8, подъемная 11, опускная 12 и тормозная 13 электромагнитные муфты, подъем- ный 14 и опускной 15 поводки, соединенные зубчатыми венцами с шестернями 5, а пальцами с муфтами 11,12, тормозной поводок 16, закрепленный на стенке корпуса 1 и соединенный пальцами с муфтой 13, несколько барабанов 17, закрепленных на каждом ШШЬм валу 7 и имеющих по одно- Myljrpocy 18, у лЪженному в один ряд на своих барабанах 17, укладочные 19 и прижимные 20 ролями каждого троса 18.
Каждая каретка 9 имеет по два опорных ролика 21, расположенных в направляющих пазах 22 корпуса 1
Тросы 18 кинематически соединены и взаимодействуют с рабочими органами машины 23 (фиг.4): подъема 24 и вращения 25.
На силовых валах 7 установлены дополнительные электромагнитные муфты 26 с поводками 27, имеющими ведомые зубчатые венцы28. На входном валу 2 выполнены дополнительные ведущие элементы вращения 29, которые непосредственно кинематически соединены с ведомыми зубчатыми венцами 28 этих поводков и образуют параллельные с основными кинематические связи с большими передаточными числами силовых валов 7 с входным валом 2 В электросхеме блока дистанционного управления 30- каждая пара параллельных электромагнитных муфт 12,26 присоединена к переключателю направлений 31 посредством переключателя скоростей 32 Питание электросхемы механизма осуществляется от источника тока 33 например от аккумулятора машины 23
Блок дистанционного управления 30 может быть установлен в кабине механизатора или в любом другом удобном для работы обслуживающего персонала месте на машине 23 или за ее пределами.
Управление механизмом осуществляется вручную переключением переключателей 31,32 или автоматически по электропроводам 34
На фиг.З изображен вариант парных кинематических связей силовых валов 7 шестернями 35 при распределении позиций управления по четыре на каждый управляемый рабочий орган 24,25 машины, когда каждая пара силовых валов 7 имеет один комплект электромагнитных муфт, которые установлены на одном валу 7 (фиг.1) или распределены на обоих валах 7 (фиг.5)
Работа механизма.
Работающий двигатель внутреннего сгорания во включенном коробкой скоростей машины 23 механизме вращает постоянно и в одном и том же направлении
выходной вал 2 с конической шестерней 3 и элементы вращения 29
Шестерня 3 вращает посредством шестерен б, полувалов 4 и шестерен 5 все поводки 14,15 электромагнитных муфт 11,12 на всех валах 7 в противоположных направлениях поводки 14 - в направлении подъема механизмов 24 25 - поводки 15 - в направлении их опускания
0 Элементы вращения 29 вращают поводки 27 посредством ведомых зубчатых венцов 28, электромагнитных муфт 26 в направлении вращения опускных поводков 15 с меньшим передаточным числом
5Когда поводки 14 15.16,27 не замкнуты
со своими муфтами 11,12.13,26, силовые валы 7 неподвижны и занимают произвольное положение.
Механизм работает при включении од0 ной из электромагнитных муфт 11,12,13,26 и одновременно выключении трех других на каждом силовом валу 7 переключателями направлений 31 и скоростей 32 к источнику тока 33 блока дистанционного управления
5 30
Для торможения и остановки движения рабочих органов 24,25 включают тормозные муфты 13.
Тормозные поводки 16 замкнуты с муф0 тами 13. а поводки 14 1527 свободно вращаются на валах 7
Корпус 1 с поводками 16 удерживают силовые валы 7 с концевыми резьбовыми участками 8, муфтами 11,12,26, барабанами
5 17 кронштейнами 10 каретками 9, укладочными 19 и прижимными 20 роликами в неподвижном состоянии Тросы 18 натянуты и удерживают механизм 24.25 машины 23 в остановленном положении.
0 Опорные ролики 21 опираются на боковые стенки пазов 22 корпуса 1 и предотвращают вращение кареток 9 вокруг своих силовых валов 7.
Для подъема рабочих органов 24 25
5 включают подъемные муфты 11 Подъемные поводки 14 вращают муфты 11с силовыми валами 7 и концевыми резьбовыми участками 8, а поводки 15,27 вращаются на валах 7 в свободном и обратном направлении По0 водки 16 неподвижны
Вместе с силовыми валами 7 вращаются муфты 12,13,26, барабаны 17. Резьба участков 8 валов 7 перемещает каретки 9 с кронштейнами 10. Ролики 21 перекатываются по
5 стенкам пазов 22 и удерживают каретки 9 от вращательных вокруг валов 7 движений Вместе с каретками 9 перемещаются укладочные 19 и прижимные 20 ролики.
При вращении валов 7 барабаны 17 подъема рабочих органов 24,25 наматывают
тросы 18 на свои поверхности, а барабаны 17 опускания рабочих органов 24,25 освобождают тросы 18 на соответствующую длину. Витки тросов 18 укладывают и снимают укладочные ролики 19, которые перемещаются за один оборот барабанов 17 на длину, равную толщине тросов 18. Ролики 20 удерживают освобождаемые тросы 18 от соскальзывания с роликов 19 в случае ослабления силы их натяжения.
Тросы 18 присоединены к плечам органов 24,25 машины 23 таким образом, что во время подъема их подъемными тросами 18 соответствующим образом опускаются и увлекаются вторым плечом опускные тросы 18. Тросы 18 уравновешивают положение плеч в пространстве.
Для опускания рабочих органов 24.25 машины 23 в быстром режиме работы включают обмотки опускных муфт 12. Замкнутые с ними опускные поводки 15 вращают муфты 12 и силовые валы 7 с концевыми резьбовыми участками 8 в направлении опускания рабочих органов 24,25 Поводки 14,27 вращаются на валах 7 свободно - поводки 14 быстро и в направлении подъема, а поводки 27 медленно и в направлении опускания. Поводки 16 неподвижны.
Все детали и механизмы работают в направлениях опускания рабочих органов 24,25, противоположных направлениям их подъема.
Переключение направлений движения рабочих органов 24,25 производят после включения тормозных муфт 13 и остановки механизма, что исключает резкое изменение направления движения деталей, их поломку и ябрывы тросов 18.
Для опускания рабочих органов 24,25 машины 23 в медленном режиме работы включают обмотки дополнительных опускных муфт 26. Замкнутые с ними дополнительные поводки 27 с зубчатыми венцами 28 под действием элементов вращения 29 входного вала 2 вращают силовые валы 7 вместе с электромагнитными муфтами 11,12,13, Таким образом, входной вал 2 непосредственно, параллельно основным кинематическим связям, посредством приводных полувалов 4 с шестернями 5,6 вращает силовые валы 7 на малых оборотах (в 5-100 раз меньше, чем у основных кинематических связей).
В остальном механизм работает в медленном режиме так же, как и в быстром, но со значительно меньшей скоростью.
Включение и переключение электромагнитных муфт к источнику электрического тока33осуществляется кнопками на панели блока дистанционного управления 30 по
электропроводам 34: основных - прямого 11. обратного 12 направлений вращения и тормозной 13 - переключателями направлений 31; скоростей - муфт быстрого 12 и медленного 26 режимов работы - переключателями скоростей 32.
Последовательное присоединение общего контакта переключателей скоростей 32 к контакту обратного направления вра0 щения переключателя направлений 31 позволяет переключать муфты 12,26 независимо одну от другой.
Так работает механизм в режиме беспрерывной работы машины 23. При этом ее
5 рабочие органы 24.25, транспортер-укладчик и бункер-накопитель под действием тросов 18 совершают движения: бункер-накопитель 25 вверх - по стрелке а и вниз - по стрелке б, а транспортер-уклад0 чик 24 - вверх по стрелке в и вниз - по стрелке г.
В условиях, когда на транспортерной ленте транспортера-укладчика 24 и в бункере-накопителе 25 отсутствуют клубнекор5 неплоды, перемещение их осуществляется с одинаковой скоростью, быстро в обоих направлениях.
Когда транспортер-укладчик 24 укладывает клубнекорнеплоды в бункер-накопи0 тель 25 или бункер-накопитель 25 выгружает их опрокидыванием, движения этих рабочих органов замедлены, что исключает возможность повреждения их в результате выброса на поверхность вороха.
3 Управление работой механизма может быть ручным или автоматическим по известной схеме.
Некоторые варианты исполнения механизма. Дополнительные кинематические
0 пары, элементы вращения 29 - зубчатые венцы 28, могут быть выполнены в зависимости от величины передаточного числа двумя коническими шестернями, червячной парой и любыми другими зубчатыми колеса5 ми передачи вращательных движений от од- ного вала 2 к перпендикулярно расположенным силовым валам 7.
На валу 2 могут быть выполнены два элемента вращения 29 и расположены по
0 обе стороны от конической шестерни 3, между соответствующими силовыми валами 7. ,
Каждый Элемент вращения 29 может быть соединен с одним или двумя зубчаты5 ми венцами 28.
Идеальная симметричная возвратно- поступательная система управления каждым рабочим органом 24,25 содержит четыре позиции управления: четыре троса 18 и четыре барабана 17.
Наличие в машине 23 двух управляемых рабочих органов 24,25 Позволяет иметь в механизме четыре силовых вала 7 с двумя барабанами 17 на каждом из них.
Механизм упрощен кинематическим соединением пары силовых валов 7, управляющей одним и тем же рабочим органом 24 или 25, шестернями 35.
В таком исполнении на каждой паре валов 7 установлен один полный комплект 11,12,13,26 с поводками 14.15.16,27. Он может быть сосредоточен на одном валу 7 или рассредоточен на обоих валах 7 (фиг.5).
Применение второго элемента вращения 29 на валу 2 позволяет выполнить несколько вариантов механизма с различными функциональными действиями.
Пятый поводок с электромагнитной муфтой позволяет иметь три кинематических параллельных линии связи, действующих в одном направлении, но с разными скоростями, или по две линии, действующих в разных направлениях и с разными скоростями перемещения рабочих органов 24,25 машины 23.
Могут быть выполнены и другие разнообразные варианты переключения направлений и скоростей.
Формула изобретения
1.Многопозиционный механизм управления рабочими органами сельскохозяйственной машины, содержащий корпус, выходной вал, посредством системы конических шестерен связанный с приводными полувалами, и связанные с последними посредством шестеренчатых передач с основными электромагнитными муфтами основные силовые валы, установленные попарно соосно, тормозной поводок, связанный с корпусом и посредством соответствующей электромагнитной муфты - с одним из силовых валов, тросовые барабаны, жестко
установленные на основных силовых валах, на концах которых выполнена ходовая резьба, а на каждой из них размещен с соответствующим соединением кронштейн, другой конец каждого из которых связан с соответствующей укладочной кареткой, имеющей укладочный и прижимной ролики, блок управления, включающий источник питания, посредством переключателей связанный с входными Клеммами электромагнитных
муфт, от л и ч а ю щ и и с я тем, что, с целью расширения эксплуатационных возможностей, он снабжен по крайней мере одной дополнительной электромагнитной муфтой и передаточными парами элементов врзщения, ведущие из которых закреплены на входном валу, а ведомые - на поводках соответствующих электромагнитных муфт, связанных с соответствующими основными силовыми валами в зоне между расположенными на них основными электромагнитными муфтами, при этом выходные клеммы дополнительных электромагнитных муфт посредством переключателей связаны с блоком питания,
2.Механизм по п.1,отличающийся тем, что он снабжен по крайней мере одним дополнительным силовым валом, установленным параллельно одному из основных
силовых валов для соединения с одним и тем же органом машины, при этом основной и дополнительный силовые валы соединены между собой шестернями.
3 32 30
-33
SudA
/
21 22 21 8-Я
Фиг I -

Использование1 в сельскохозяйственном машиностроении, в машинах для уборки клубнекорнеплодов картофеля, сахарной и кормовой свеклы и др, Сущность изобретения: механизм содержит коробчатый корпус, входной вал, приводные полува- лы силовые валы, Связанные с последним посредством шестеренчзтых передач и электромагнитных муфт, тросовые барабаны, жестко установленные на силовых валах, имеющих на концевых участках ходовую резьбу, укладочные каретки с укладочными и прижимными роликами и дистанционный блок управления, включающий источник питания и переключатели Группа силовых валов, соединенных с одним и тем же рабочим органом машины, кинематически соединена между собой шестернями и снабжена одним комплектом электромагнитных муфт с поводками. 1 з п ф-лы, 5 ил
fd
У
tv /// /// 777 77
Фиг. 4
®иг,3 д-л
12
//
Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
