Изобретение Многопозиционный механизм управления рабочими органами клубне-корнеплодоуборочной машины относится к сельскохозяйственному машиностроению и предназначено для оснащения машин для уборки клубнекорнеплодов, а именно картофелекопателей, комбайнов и трамспортеров-перегрузчиков, выкапывания и перегрузки картофеля, сахарной и кормовой свеклы.
Целью изобретения является повышение эффективности управления.
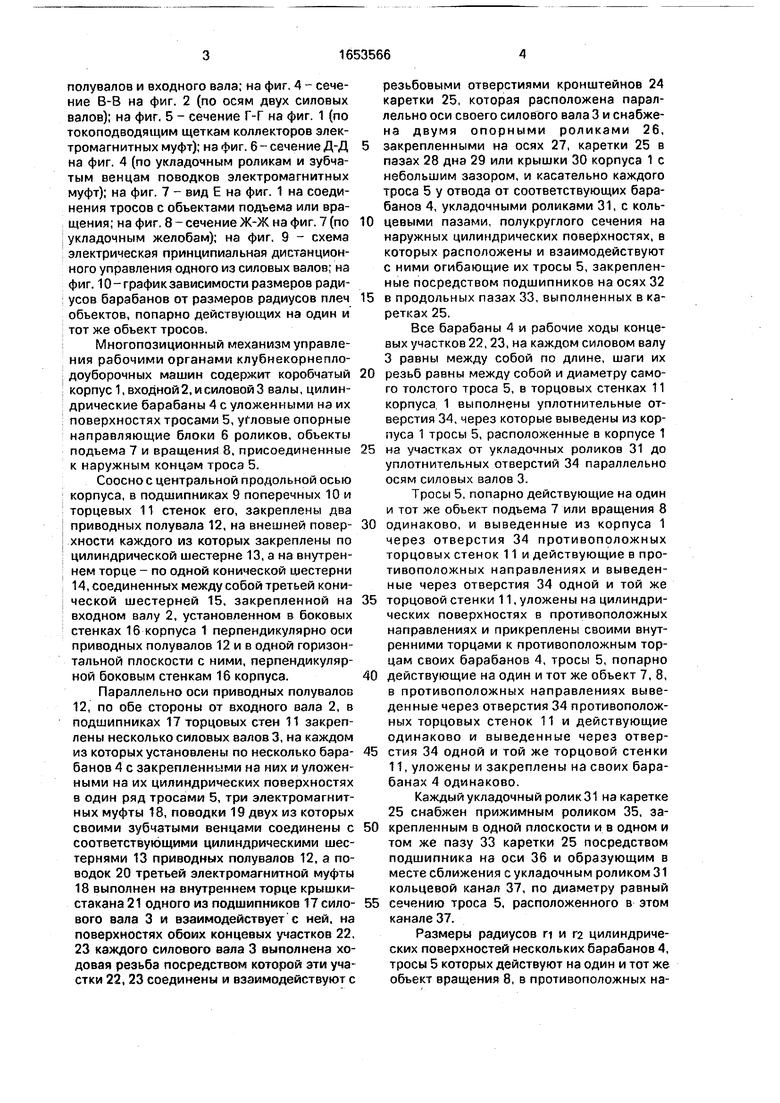
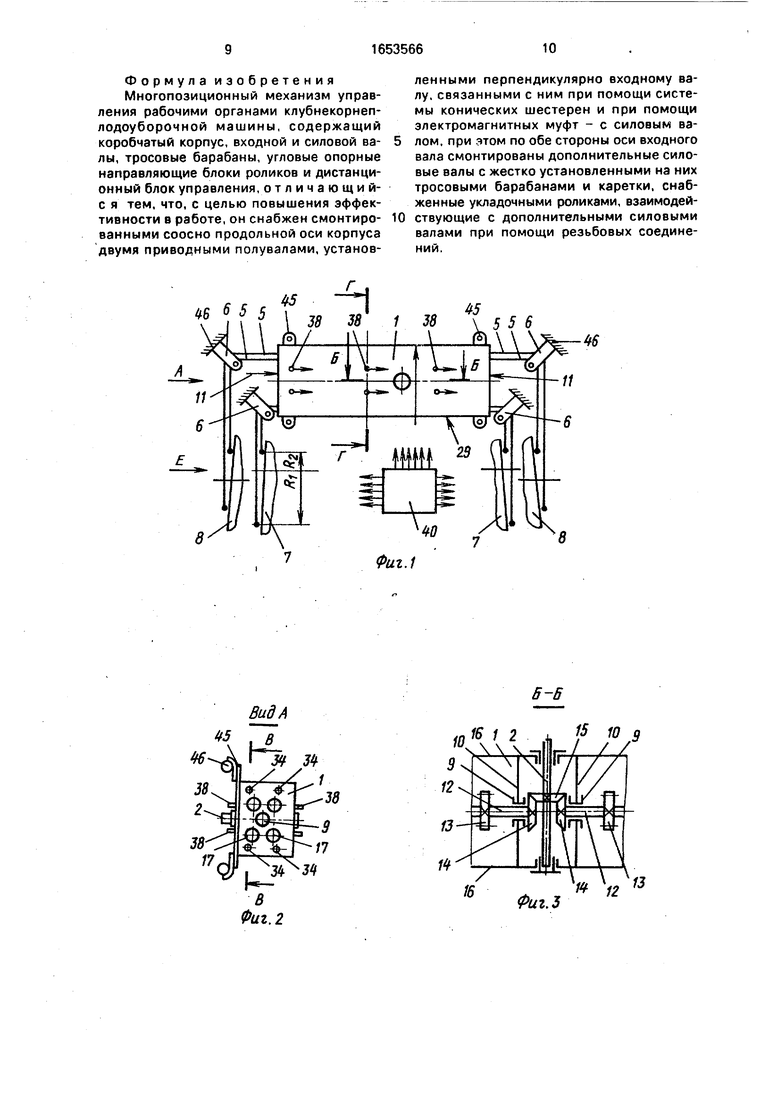
На фиг. 1 изображен внешний вид многопозиционного механизма управления, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг 3 - сечение Б-Б на фиг. 1, по осям приводных
полувалов и входного вала; на фиг. 4 - сечение В-В на фиг. 2 (по осям двух силовых валов); на фиг. 5 - сечение Г-Г на фиг. 1 (по токоподводящим щеткам коллекторов электромагнитных муфт); на фиг. 6 - сечение Д-Д на фиг. 4 (по укладочным роликам и зубчатым венцам поводков электромагнитных муфт); на фиг. 7 - вид Е на фиг. 1 на соединения тросов с объектами подъема или вращения; на фиг. 8 - сечение Ж-Ж на фиг. 7 (по укладочным желобам); на фиг. 9 - схема электрическая принципиальная дистанционного управления одного из силовых валов; на фиг. 10 - график зависимости размеров радиусов барабанов от размеров радиусов плеч объектов, попарно действующих на один и тот же объект тросов.
Многопозиционный механизм управления рабочими органами клубнекорнепло- доуборочных машин содержит коробчатый корпус 1, входной 2. и силовой 3 валы, цилиндрические барабаны 4 с уложенными на их поверхностях тросами 5, угловые опорные направляющие блоки 6 роликов, объекты подъема 7 и вращений 8, присоединенные к наружным концам троса 5.
Соосно с центральной продольной осью корпуса, в подшипниках 9 поперечных 10 и торцевых 11 стенок его, закреплены два приводных полувала 12, на внешней повер- хности каждого из которых закреплены по цилиндрической шестерне 13, а на внутреннем торце - по одной конической шестерни 14, соединенных между собой третьей конической шестерней 15, закрепленной на входном валу 2, установленном в боковых стенках 16 корпуса 1 перпендикулярно оси приводных полувалов 12 и в одной горизонтальной плоскости с ними, перпендикулярной боковым стенкам 16 корпуса.
Параллельно оси приводных полувалов 12, по обе стороны от входного вала 2, в подшипниках 17 торцовых стен 11 закреплены несколько силовых валов 3, на каждом из которых установлены по несколько бара- банов 4 с закрепленными на них и уложенными на их цилиндрических поверхностях в один ряд тросами 5, три электромагнитных муфты 18, поводки 19 двух из которых своими зубчатыми венцами соединены с соответствующими цилиндрическими шестернями 13 приводных полувалов 12, а поводок 20 третьей электромагнитной муфты 18 выполнен на внутреннем торце крышки- стакана 21 одного из подшипников 17 сило- вого вала 3 и взаимодействует с ней, на поверхностях обоих концевых участков 22. 23 каждого силового вала 3 выполнена ходовая резьба посредством которой эти участки 22, 23 соединены и взаимодействуют с
резьбовыми отверстиями кронштейнов 24 каретки 25, которая расположена параллельно оси своего силового вала 3 и снабжена двумя опорными роликами 26. закрепленными на осях 27, каретки 25 в пазах 28 дна 29 или крышки 30 корпуса 1 с небольшим зазором, и касательно каждого троса 5 у отвода от соответствующих барабанов 4, укладочными роликами 31, с кольцевыми пазами, полукруглого сечения на наружных цилиндрических поверхностях, в которых расположены и взаимодействуют с ними огибающие их тросы 5, закрепленные посредством подшипников на осях 32 в продольных пазах 33, выполненных в каретках 25.
Все барабаны 4 и рабочие ходы концевых участков 22, 23, на каждом силовом валу 3 равны между собой по длине, шаги их резьб равны между собой и диаметру самого толстого троса 5, в торцовых стенках 11 корпуса 1 выполнены уплотнительные отверстия 34, через которые выведены из корпуса 1 тросы 5, расположенные в корпусе 1 на участках от укладочных роликов 31 до уплотнительных отверстий 34 параллельно осям силовых валов 3.
Тросы 5. попарно действующие на один и тот же объект подъема 7 или вращения 8 одинаково, и выведенные из корпуса 1 через отверстия 34 противоположных торцовых стенок 11 и действующие в противоположных направлениях и выведенные через отверстия 34 одной и той же торцовой стенки 11,уложены на цилиндрических поверхностях в противоположных направлениях и прикреплены своими внутренними торцами к противоположным торцам своих барабанов 4, тросы 5, попарно действующие на один и тот же объект 7, 8, в противоположных направлениях выведенные через отверстия 34 противоположных торцовых стенок 11 и действующие одинаково и выведенные через отверстия 34 одной и той же торцовой стенки 11, уложены и закреплены на своих барабанах 4 одинаково.
Каждый укладочный ролик 31 на каретке 25 снабжен прижимным роликом 35, закрепленным в одной плоскости и в одном и том же пазу 33 каретки 25 посредством подшипника на оси 36 и образующим в меси е сближения с укладочным роликом 31 кольцевой канал 37, по диаметру равный сечению троса 5, расположенного в этом канале 37.
Размеры радиусов п и Г2 цилиндрических поверхностей нескольких барабанов 4, тросы 5 которых действуют на один и тот же объект вращения 8, в противоположных направлениях, пропорциональны размерам радиусов п и Г2 плеч этого объекта 8.
Токоподводящие щетки 38, электромаг- нирных муфт 18 закреплены в резьбовых отверстиях боковых стенок 16 корпуса 1 и соединены электропроводами 39 с блоком 40 дистанционного управления.
Соосно с объектом вращения 8, на который действуют попарно и в противоположных направлениях тросы 5, на боковых поверхностях этого объекта 8, в плоскости расположения тросов 5, выполнены укладочные желоба 41 кольцевого типа и полукруглого сечения, в которых расположены и закреплены наружными концевыми участками тросы 5, взаимодействующие с этими желобами 41, например, бункера-накопителя 42, и транспортеры-укладчики 43 картофелекопателя 44.
Корпус 1 механизма управления закреплен проушинами 45 на раме 46 машины 44, укомплектованной этим механизмом, в положении, перпендикулярном направлению действия тросов 5 на объекты подъема 7 и вращения 8.
Блок 40 дистанционного управления имеет электромеханические или электронные трехпозиционные переключатели 47. Электропитание блока 40 всей схемы электроуправления осуществляется от аккумулятора 48 централизованного привода машины 44.
Механизатор управляет механизмом переключения трехпозиционных электропереключателей 47 блока 40. Каждый силовой вал 3 имеет свой электропереключатель 47, у которого средний контакт соединен с тормозной муфтой 18. верхний - с муфтой 18 подъема объекта 7, 8, нижний - с муфтой 18 опускания объекта. В случаях, когда два силовых вала 3 синхронно управляют положением одного и того же объекта 8.7, то к контактам одного переключателя 47 присоединены идентичные электромагнитные муфты 18 обоих силовых валов 3, Электромагнитные муфты 18 включаются через электропровода 39 и токоподводящие щетки 38.
Механизм работает следующим образом.
Перед началом работы все электропереключатели 47 установлены в тормозное положение и электромагнитные муфты 18 отсоединены от поводков 19, 20. Объекты подъема 7, 8 могут находиться в произвольном положении.
Механизатор одновременно включает редуктор централизованного привода с двигателем внутреннего сгорания и блок 40 дистанционного управления к аккумулятору 48.
Входной вал 2 вращается в подшипниках боковых стенок 16 корпуса 1 постоянно и в одном и том же направлении. Вместе с валом 2 вращается коническая шестерня 15.
которая вращает во взаимно противоположных направлениях две конические шестерни 14 вместе с двумя приводными полувалами 12. в подшипниках 9 поперечных 10 и торцовых 11 стенок корпуса 1, и двумя цилиндри0 ческими шестернями 13.
Каждая цилиндрическая шестерня 13 рращает все, соединенные с ней, поводки 19. Все поводки 19 подъема объектов 7, 8. вращаются на своих силовых валах 3 в од5 ном направлении, а поводки 19 опускания объектов 7, 8 - в противоположном направлении, Силовые валы 3 заторможены и неподвижны. Электромагнитные муфты 18 торможения включены и соединены с по0 еодками 20 и, посредством их, с крышками- стаканами 21 и с торцовой стенкой 11 корпуса 1.
Барабаны 4 всех силовых валов 3 (фиг, 9, 4. 6) удерживают в заторможенном поло5 жемии объекты подъема 7 и вращения 8 (фиг. 1,7,8. 10).
Перед троганием картофелекопателя 44 с места механизатор поочередно выполняет операции подъема в крайнее верхнее поло0 жение сперва транспортера-укладчика 43 и заднего торца бункера-накопителя 42, затем он опускает в положение укладки, п бункер-накопитель 42. транспортер-укладчик 43 (фиг. 7).
5 Движением пальца руки он переключает переключатель 47 транспортера-укладчика 43 в положение подъема. При этом одновременно выключаются электромагнитные муфты 18 подъема объекта 7. 8, и выклю0 чаются тормозные муфты 18 и муфты 18 опускания объекта 7, 8 (фиг. 9).
Силовые валы 3 управления положением транспортера-укладчика 43 соединяются муфтами 18 подъема с поводками 19 подъ5 ема и вращаются в подшипниках 17 крышек- стаканов 21 торцовых стенок 11 корпуса 1 вместе с барабанами 4, электроомагнитны- ми муфтами 18 и концевыми участками 22, 23 в направлении подъема объекта 7. Элек0 тромагнитные муфты 18 опускания объекта 7 вращаются вместе с силовыми валами 3, а из поводки 19 вращаются в обратном направлении вхолостую. Поводки 20 остаются неподвижными (фиг. 4. 6, 9).
5Барабаны 4 подъема наматывают на
свои цилиндрические поверхности тросы 5 подъема, которые огибая свои укладочные ролики 31 под углом 90° вращают их в продольных пазах 33 кареток 25, фиг. 4, 6,8, на осях 32. Каретки 25 вместе с кронштейнами
24, фиг. 4, 6, 9, роликами 31, осями 32, прижимными роликами 35, осями 36 и постоянно действующими на тросы 5 кольцевыми каналами 37, образованными пазами на поверхностях роликов 31 и 35 в местах их сближения, перемещаются действием ходовых резьб концевых участков 22, 23 на ответные резьбы посадочных отверстий кронштейнов 24, за один оборот силового вала 3 на один шаг резьбы или на диаметр троса 5 в направлении подъема. Таким образом, за один оборот силового вала 3 трос 5 перемещается в сторону подъема объекта 7 на один шаг резьбы или на диаметр троса 5 в направлении подъема. Таким образом, за один оборот силового вала 3 трос 5 перемещается в сторону подъема объекта 7 на один виток на барабане 4 и в уплотни- тельных отверстиях 34. В этих отверстиях 34 конструктивные элементы очистки тросов 5 очищают с их поверхностей, на внешней стороне стенок 11 - грязь, а на внутренней - смазку. За пределами корпуса 1 (фиг. 1, 2, 7, 8, 10) тросы 5 на углах изгибов огибают опорные ролики угловых блоков 6 и поднимают укладочно-загрузоч- ный торец транспортера-укладчика 43 (фиг. 7) поворачивают его на оси рамы 46 и при этом опускают противоположный, загрузочный торец его.
Барабан 4 опускания объекта 7 наоборот сматывает со своей цилиндрической поверхности, синхронно с барабаном 4 подъема, за каждый оборот силового вала 3 по одному витку троса 5, который увлекается загрузочным торцом транспортера-укладчика 43.
Небольшие зазоры между поверхностью одной из стенок паза 28 и роликом 26 исключают заклинивание или заедание его в пазу 28.
Ролики 26 удерживают каретки 25 от вращательных движений их вокруг силовых валов 3 под действием сил подъема и опускания объектов 7 тросами 5, которые воспринимаются плечами барабанов 4, равными их радиусам (фиг. 10).
Кольцевые каналы 37 (фиг. 4) удерживают тросы 5 в пазах укладочных роликов 31 в случаях их ослабления.
Вращение силового вала 3 в сторону подъема транспортера-укладчика 43 (фиг. 7) происходит до момента выполнения заданной операции, после чего переключают переключатель 47 в тормозное положение. При этом торцовые муфты 18 на силовых валах 3 мгновенно соединяются с поводками 20, и посредством поводков 20 и крышек-стаканов 21 -с торцовой стенкой 11 корпуса 1.
Муфты подъема 18 одновременно мгновенно выключены и разъединены со своими поводками 19.
Силовые валы 3 прекращают вращение,
а объекты 7 заторможены в нужном положении.
Таким же образом механизатор включает переключатель 47 в положение подъема бункера-накопителя 42, у которого тросы 5
0 находятся в укладочных желобах 41 (фиг. 6, 7), расположенных соосно с осью вращения бункера 42 на раме 46, и закреплены своими торцами в оптимальной точке этого желоба 41.
5
Тросы 5 подъема охватывают желоб 41, с задней стороны бункера, а тросы 5 опускания - с передней. Тросы 5 при любом положении бункера-накопителя 42 опираются на
0 одинаковые радиусы RIH Н2(фиг. 10), желоба 41, а следовательно, длина плеч приложения сил тросами 5. и величина момента сил вращения не зависит от положения бункера-накопителя в пространстве, т.к. ось про5 ходит через центр тяжести.
Силовые валы 3 поворота бункера-накопителя 42 работают так же, как и силовые валы 3 подъема транспортера-укладчика 43. Операции опускания транспортера-уклад0 чика 43 и поворота бункера-накопителя 42 вокруг их осей на раме 46 картофелекопателя 44, равно, как и других рабочих органов 7.8 других машин, выполняются переключением их переключателей 47 в положение
5 опускания. При этом мгновенно включаются электромагнитные муфты 18 опускания объектов 7, 8 и выключаются муфты 19 подъема и торможения.
Силовые валы 3, каретки 25, барабаны
0 4 и тросы 5 при этом движутся в обратном направлении и вращают рабочие органы клуб- некорнеплодоуборочных машин в обратном направлении. Так легко и просто механизатор, манипулируя кнопками пере5 ключателей 47, управляет машиной 44.
Длины перемещаемых частей тросов 5, в зависимости от размеров радиусов RitR2 объектов 7, 8 фиг. 1,10 могут быть разными. В этих случаях радиусы п, Г2, соответ0 ствующих барабанов 4 выполняются по размерам, пропорциональным размерам радиусов RI, R2 объектов подъема 7 и вращения 8 (фиг. 1) и тросы 5 подъема и опускания натянутых при любом положении
5 объектов 7, 8.
Все прямолинейные участки тросов 5 за пределами корпуса 1 расположены в закрытых местах рамы 46 и закрыты легкими кожухами, защищающими их от случайных повреждений, от пыли и грязи
Формула изобретения Многопозиционный механизм управления рабочими органами клубнекорнеп- лодоуборочной машины, содержащий коробчатый корпус, входной и силовой валы, тросовые барабаны, угловые опорные направляющие блоки роликов и дистанционный блок управления, отличающий- с я тем, что, с целью повышения эффективности в работе, он снабжен смонтированными соосно продольной оси корпуса двумя приводными полувалами, установ
ленными перпендикулярно входному валу, связанными с ним при помощи системы конических шестерен и при помощи электромагнитных муфт - с силовым валом, при этом по обе стороны оси входного вала смонтированы дополнительные силовые валы с жестко установленными на них тросовыми барабанами и каретки, снабженные укладочными роликами, взаимодействующие с дополнительными силовыми валами при помощи резьбовых соединений.


| название | год | авторы | номер документа |
|---|---|---|---|
| Многозвенный механизм управления рабочими органами корнеклубнеуборочных машин | 1988 |
|
SU1724047A1 |
| Многопозиционный механизм управления рабочими органами сельскохозяйственной машины | 1990 |
|
SU1784571A1 |
| МНОГОКАНАЛЬНЫЙ ПРИВОД АВТОНОМНО УПРАВЛЯЕМЫХ МЕХАНИЗМОВ КАРУСЕЛИ | 1991 |
|
RU2027334C1 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ И СЧЕТА ДЕНЕЖНЫХ БИЛЕТОВ | 1999 |
|
RU2154597C1 |
| Устройство для укладки цилиндрических изделий в контейнер | 1981 |
|
SU1027119A1 |
| МНОГОРЯДНАЯ КЛУБНЕКОРНЕПЛОДОУБОРОЧНАЯ МАШИНА | 1987 |
|
RU2021667C1 |
| МНОГОКАНАЛЬНЫЙ ПРИВОД АВТОНОМНО УПРАВЛЯЕМЫХ МЕХАНИЗМОВ КАРУСЕЛИ | 1991 |
|
RU2027335C1 |
| Устройство для поперечного складывания текстильных полотен на раскройном столе | 1977 |
|
SU767001A1 |
| РОТОРНЫЙ МЕХАНИЗМ ДЛЯ ВЫКАПЫВАНИЯ КЛУБНЕКОРНЕПЛОДОВ | 1991 |
|
RU2048727C1 |
| Машина для изготовления заготовок бумажных мешочков | 1985 |
|
SU1329994A1 |


Изобретение относится к сельскохозяйственному машиностроению, к механизмам управления рабочих органов машин для уборки клубнекорнеплодов картофеля, сахарной и кормовой свеклы. Цель изобретения - повышение эффективности управления. Механизм содержит коробчатый корпус 1, в котором смонтированы и закреплены на подшипниках входной вал с конической шестерней; два приводных полувала с закрепленными на них по одной цилиндрической шестерни и по одной конической, соединенных с конической шестерней входного вала, несколько силовых валов 3, на каждом из которых имеется по два концевых участка 22, 23 с ходовой резьбой, по одной укладочной каретке 25, соединенной с взаимодействующей с концевыми резьбовыми отверстиями своих кронштейнов 24, подъемная спускная и тормозная электромагнитные муфты 18, закрепленные на каждом силовом валу, подъемный и спускной поводки 19, закрепленные своими ступицами и подшипниками на силовом валу 3, соединенные зубчатыми венцами с соответствующими цилиндрическими шестернями приводных полувалов, а пальцами взаимодействующие со своими электромагнитными муфтами, тормозной поводок, закрепленный на торцевой стенке корпуса 1 и взаимодействующий с тормозной электромагнитной муфтой. На каждом силовом валу закреплено по несколько барабанов 4, а каждый барабан имеет свой силовой трос 5, уложенный на его поверхности в один ряд. Каждая каретка имеет укладочные 31 и прижимные ролики всех тросов своего силового вала и по два опорных ролика, расположенных в продольных направляющих пазах дна 29 или крышки 30 корпуса 1. Кроме того, тросы 5 снабжены опорными блоками роликов, закрепленными на раме комплектуемой машины, в местах изгибов тросов, а сам механизм имеет блок дистанционного управления электромагнитными муфтами механизма, который расположен в кабине механизатора и соединен с муфтами электропроводами. 10 ил. Ё О ел CJ ся о о
, , JS « 5 5 6
LЦ
fi
Jo 5 о Ь
VrUb
L s U
8
Вид А
46
, JS « 5 5 6
fi
Jo 5 о Ь
г --1- -//
46
Фиг.1
5-6
16 1 2
15 Ю а
Oi
rA
4
M rs O
7/77
& U
16
N,
W Ю М 2
Ч N. ч
С
55
15 Щ /J /У # /z ...
Ф/л.2
гг
| Петров Г.Я | |||
| Картофелеуборочные машины, М.: Машиностроение, 1984, с | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
