Изобретение относится к сельскохозяйственному машиностроению.
Цель изобретения - расширение функциональных возможностей.
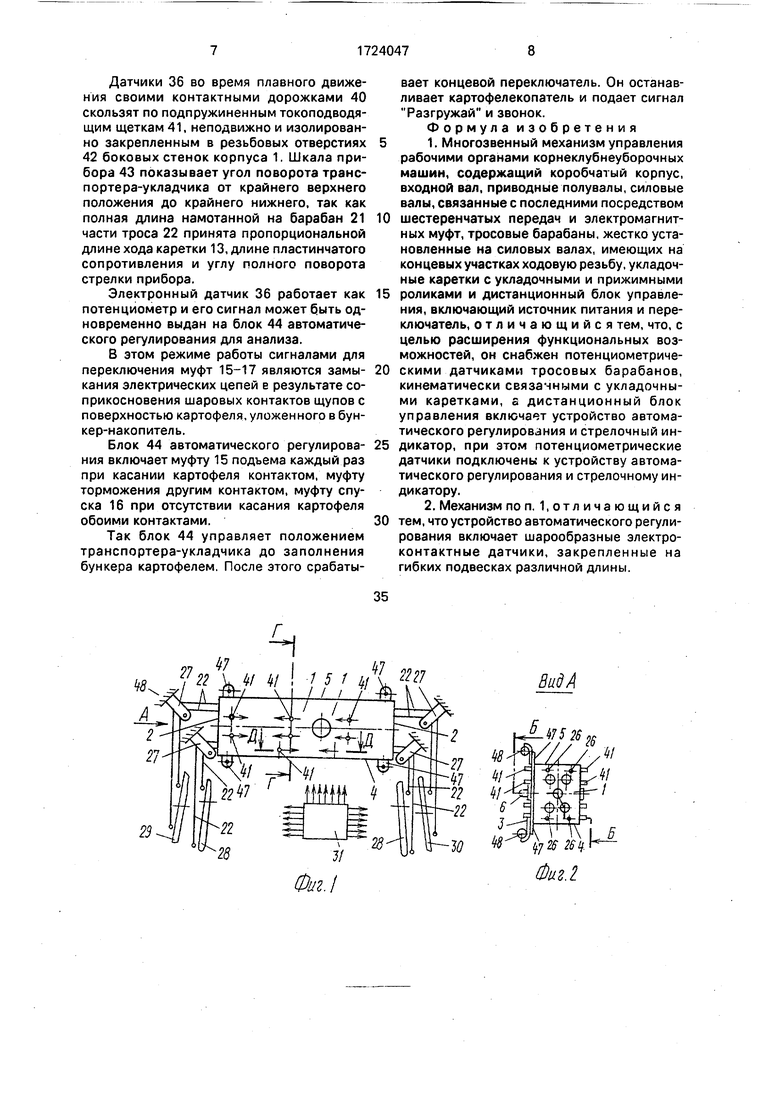
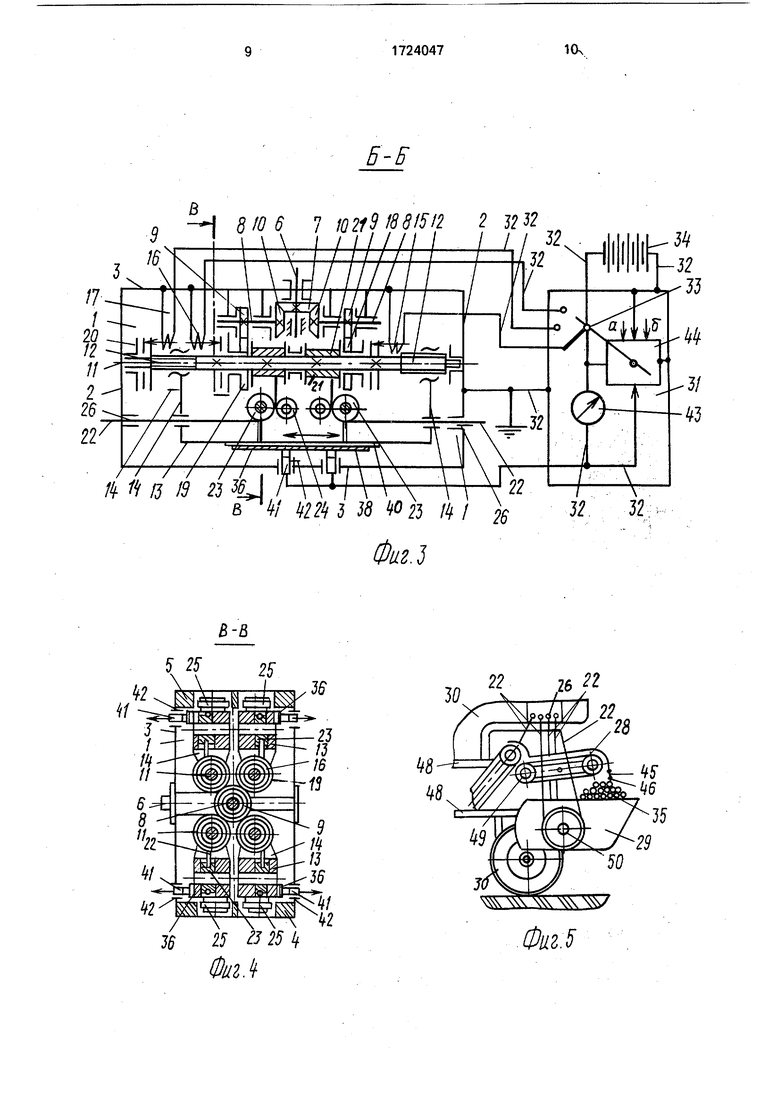
На фиг. 1 показан предлагаемый многозвенный механизм, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на
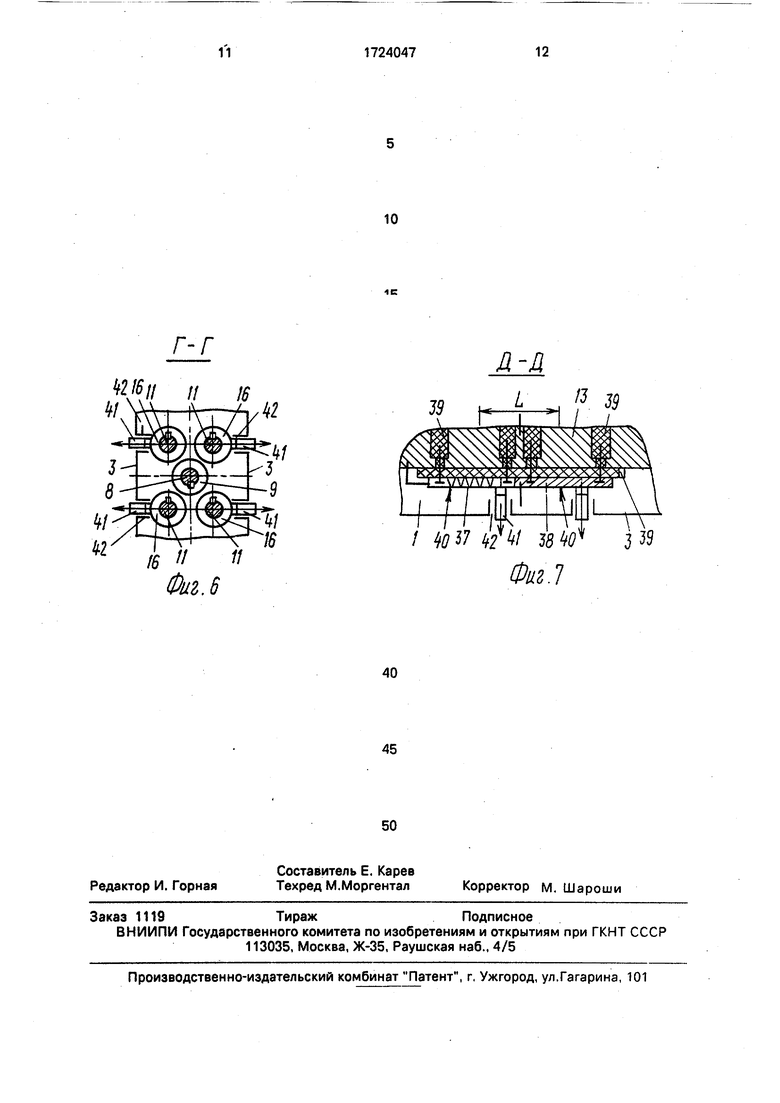
фиг. 2; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - схемы подвески рабочих органов на тросах и размещения датчиков; на фиг. 6 - сечение Г-Г на фиг. 1; на фиг. 7 - сечение Д-Д на фиг. 1.
Многозвенный механизм включает корпус 1 с торцовыми стенками 2, боковые стенки 3, дно 4 и съемную крышку 5, с продольными направляющими пазами на внутренней стороне, в корпусе 1 смонтированы входной вал 6 (фиг. 2 и 3) с конической шестерней 7, два приводных полувала 8 с закрепленными на них по одной цилиндрической шестерни 9 и по одной конической шестерни 10, соединенных с конической шестерней 7 входного вала 6, несколько силовых валов 11, на каждом из которых имеются по два концевых участка 12с ходовой резьбой, по одной укладочной каретке 13, соединенной и взаимодействующей с концевыми участками 12 резьбовыми отверстиями своих кронштейнов 14, подъемная 15, спускная 16 и тормозная 17 электромагнитные муфты, закрепленные на силовом валу 11, подъемный 18 и спускной 19 поводки, закрепленные своими ступицами и подшипниками на силовом валу 11, соединенные зубчатыми венцами с соответствующими цилиндрическими шестернями 9 приводных полувалов 8, а пальцами взаимодействующие со своими электромагнитными муфтами 15 и 16, тормозной поводок 20, закрепленный на торцовой стенке 2 корпуса 1 и взаимодействующий с тормозной электромагнитной муфтой 17, по несколько барабанов 21, закрепленных на силовом валу 11 и имеющих по одному тросу 22, уложенному в один ряд на цилиндрических поверхностях своих барабанов 21, укладочные 23 и прижимные 24 ролики каждого троса 22, закрепленные подшипниками на своих осях в продольных пазах кареток 13, по два опорных ролика 25 на каждой каретке, расположенных в продольных направляющих пазах дна 4 и крышки 5 корпуса 1 и опирающихся на одну из двух боковых стенок этих пазов, уплотнительноочистные отверстия 26 каждого троса 22, выполненные в торцовых стенках 2 корпуса 1, угловые опорные блоки 27 роликов в местах изгибов тросов 22, рабочие органы подъема 28 и поворота 29 машин 30, блок 31 дистанционного управления с электроприводами 32, трехпо- зиционными переключателями 33 и аккумулятором 34, клубни 35 заполнения рабочих органов 28 и 29 машины 30.
На укладочной каретке 13 каждого силового вала 11 параллельно его оси на прилегающей к боковой стенке 3 корпуса 1 стороне закреплен электронный датчик 36 положения рабочих органов 28 и 29 машины 30 в пространстве, который выполнен в форме пластинчатого сопротивления 37, равного по длине цилиндрической поверхности барабана 21, заполненной тросом 22, при полной его укладке, снабжен токопроводя- щей антифрикционной пластиной 38 такой
же длины и изолирован электроизоляционным материалом 39 от каретки 13, причем один торец пластинчатого сопротивления 39 соединен с кареткой 13, другой - с токопроводящей пластиной 38, а на наружных поверхностях пластинчатого сопротивления 37 и токопроводящей пластины 38 выполнены электроконтактирующие дорожки 40, которые контактируют с токоподводящими щетками 41, изолированно закрепленными в резьбовых отверстиях 42 боковых стенок 3 корпуса 1 и соединенными электропроводом 32 с электроизмерительным стрелочным прибором 43, шкала которого
отградуирована в угловых величинах поворота рабочих органов 28 и 29 машины 30, и с блоком 44 автоматического регулирования, взаимодействующим с соответствующим трехпозиционным переключателем 33
блока 31 дистанционного управления.
Кроме того, на торце одного из двух взаимодействующих рабочих органов, например 28, машины 30 закреплены несколько пар гибких, изолированных от него, соединенных электропроводами 32 с блоком 31 дистанционного управления датчиков 45 разной заданной длины, у которых на свисающих торцах выполнены открытые
шарообразные электроконтакты 46, контактирующие со средой заполнения (картофелем) 35 второго взаимодействующего рабочего органа 29.
Токоподводящие щетки 41 злектромагнитных муфт 15-17 закреплены в резьбовых отверстиях боковых стенок 3 корпуса 1 и соединены проводами 32 с соответствующими контактами трехпозиционных переключателей 33 блока 31 дистанционного
управления.
Корпус 1 механизма управления закреплен проушинами 47 на раме 48 машины, укомплектованной этим механизмом, в положении, перпендикулярном направлению
действия тросов 22 на рабочие органы 28 и 29 машины 30, установленные и закрепленные с возможностью вращения на осях 49 и 50 этой же рамы 48 машины, а блок 31 дистанционного управления может быть вынесен в кабину водителя или в другое место машины. Он может управляться вручную - механизатором, автоматически - блоком 44 автоматического регулирования и на расстоянии, с диспетчерского пункта
- радиосигналами через радиоприемно-пе- редающие устройства.
Входной вал 6 посредством карданного вала или другим известным способом соединен с редуктором централизованного привода машины 30.
Механизатор управляет механизмом вручную - переключением трехпозицион- ных электропереключателей 33 блока 31. Каждый силовой вал 11 имеет свой электропереключатель 33, у которого средний кон- такт соединен с тормозной муфтой 17, верхний - с муфтой 16 спуска, нижний - с муфтой 17 подъема рабочих органов 28 и 29 машины 30. В случаях, когда два силовых вала 11 синхронно управляют положением одного и того же рабочего органа 28 и 29, то к контактам одного переключателя 33 присоединены идентичные электромагнитные муфты 15-17 обоих силовых валов 11. Электромагнитные муфты 15-17 включаются че- рез электропровода 32 и токопроводящие щетки 41.
Подъемный 18 и спускной 19 поводки закреплены на своем силовом валу 11 ступицами на подшипниках качения и не имеют непосредственного жесткого соединения с ним. Они являются промежуточным звеном, соединяющим электромагнитные муфты 15 и 16с цилиндрическими шестернями 9 приводных полувалов 8.
Каждая каретка 13 перемещается со своими двумя кронштейнами 14 на концевых участках 12 силового вала 11 под действием ходовых резьб и в зависимости от направления вращения силового вала 11 со- вершает возвратно-поступательные перемещения вдоль оси вала 11 за один оборот вала 11 на один шаг резьбы на участке L
Механизм работает следующим образом.
Перед началом работы все электропереключатели 33 установлены в тормозное положение и электромагнитные муфты 15- 17, отсоединены от поводков 19 и 20. Рабочие органы подъема 28 и поворота 29 машины 30 могут находиться в произвольном положении.
Механизатор одновременно подключает редуктор централизованного привода с двигателем внутреннего сгорания и блок 31 дистанционного управления к аккумулятору 34.
Входной вал 6 вращается в подшипниках боковых стенок 3 корпуса 1 постоянно и в одном и том же направлении. Вместе с валом 6 вращается коническая шестерня 7, которая вращает во взаимно противоположных направлениях две конические шестерни 10 вместе с двумя приводами, полувалами 8 и двумя цилиндрическими ше- стернями 9.
Электромагнитные тормозные муфты 17 включены и соединены с поводками 20 и посредством их с торговой стенкой 2 корпуса 1. Барабаны 21 всех си; овых валов 11
удерживают в заторможенном положении рабочие органы 28 и 29.
Рабочими органами 28 подъема являются, например, транспортер-укладчик и бункер-накопитель машины - картофелекопателя 30, на раме 48 которого закреплен корпус 1 механизма управления и угловые опорные балки 27 роликов так, что тросы 22 перемещаются от своих барабанов 21 до рабочих органов 28 и 29 только вдоль своих осей, не меняя своего положения в пространстве.
Многозвенный механизм работает следующим образом.
Перед троганием картофелекопателя 30 с места механизатор поочередно выполняет операции подъема в крайнее верхнее положение транспортера-укладкчика и заднего торца бункера-накопителя, затем опускает транспортер-укладчик в бункер-накопитель в положение укладки. Затем устанавливается электропереключатель 33 в положение подъема. При этом включаются электромагнитные муфты 15 подъема рабочего органа 28 и одновременно выключаются тормозные муфты 17 и муфты 16 опускания рабочего органа 28.
Силовые валы 11 управления положением транспортера-укладчика 28 соединяются муфтами 15с поводками 18 подъема и вращаются в подшипниках торцовых стенок 2 корпуса 1 вместе с барабанами 21, электромагнитными муфтами 15-17 и концевыми резьбовыми участками в направлении подъема транспортера-укладчика 28. Электромагнитные муфты 16 спускания транспортера-укладчика 28 вращаются вместе с силовыми валами 11, а их поводки 19 вращаются s обратном направлении вхолостую. Поводки 20 неподвижны.
Барабаны 21 подъема наматывают на свои цилиндрические поверхности тросы 22 подъема, которые огибают свои укладочные ролики 23 под углом 90°, вращают их в продольных пазах кареток 13 на своих осях. Ролики 24 прижимают тросы 22 к роликам 23 и не дают им возможности соскочить из из пазов во время ослаблений натяжения тросов. Каретки 13 вместе с кронштейнами 14, роликами 23 и 24, электронным датчиком
36,включая пластинчатое сопротивление
37,антифрикционную проводящую пластину 38 и материал 39, изолирующий их от каретки 13, перемещаются по ходовым резьбам концевых участков 12 резьбами кронштейнов по принципу пары винт-гайка за один оборот вала 11 на один шаг резьбы, при этом трос 22 перемещается в сторону подъема транспортера-укладчика 28 на один виток на барабане 21.
Датчики 36 во время плавного движения своими контактными дорожками 40 скользят по подпружиненным токоподводя- щим щеткам 41, неподвижно и изолированно закрепленным в резьбовых отверстиях 42 боковых стенок корпуса 1. Шкала прибора 43 показывает угол поворота транспортера-укладчика от крайнего верхнего положения до крайнего нижнего, так как полная длина намотанной на барабан 21 части троса 22 принята пропорциональной длине хода каретки 13, длине пластинчатого сопротивления и углу полного поворота
стрелки прибора.
Электронный датчик 36 работает как потенциометр и его сигнал может быть одновременно выдан на блок 44 автоматического регулирования для анализа.
В этом режиме работы сигналами для переключения муфт 15-17 являются замыкания электрических цепей в результате соприкосновения шаровых контактов щупов с поверхностью картофеля, уложенного в бункер-накопитель.
Блок 44 автоматического регулирования включает муфту 15 подъема каждый раз при касании картофеля контактом, муфту торможения другим контактом, муфту спуска 16 при отсутствии касания картофеля обоими контактами.
Так блок 44 управляет положением транспортера-укладчика до заполнения бункера картофелем. После этого срабатывает концевой переключатель. Он останавливает картофелекопатель и подает сигнал Разгружай и звонок.
Формула изобретения
1. Многозвенный механизм управления
рабочими органами корнеклубнеуборочных машин, содержащий коробчатый корпус, входной вал, приводные полувалы, силовые валы, связанные с последними посредством
шестеренчатых передач и электромагнитных муфт, тросовые барабаны, жестко установленные на силовых валах, имеющих на концевых участках ходовую резьбу, укладочные каретки с укладочными и прижимными
5 роликами и дистанционный блок управления, включающий источник питания и переключатель, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен потенциометриче0 скими датчиками тросовых барабанов, кинематически связачными с укладочными каретками, е дистанционный блок управления включает устройство автоматического регулирования и стрелочный ин5 дикатор, при этом потенциометрические датчики подключены к устройству автоматического регулирования и стрелочному индикатору.
2. Механизм по п. 1,отличающийся
0 тем, что устройство автоматического регулирования включает шарообразные электроконтактные датчики, закрепленные на гибких подвесках различной длины.
В-Б
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный механизм управления рабочими органами клубнекорнеплодоуборочной машины | 1988 |
|
SU1653566A1 |
| Многопозиционный механизм управления рабочими органами сельскохозяйственной машины | 1990 |
|
SU1784571A1 |
| МНОГОКАНАЛЬНЫЙ ПРИВОД АВТОНОМНО УПРАВЛЯЕМЫХ МЕХАНИЗМОВ КАРУСЕЛИ | 1991 |
|
RU2027334C1 |
| МНОГОРЯДНАЯ КЛУБНЕКОРНЕПЛОДОУБОРОЧНАЯ МАШИНА | 1987 |
|
RU2021667C1 |
| МНОГОКАНАЛЬНЫЙ ПРИВОД АВТОНОМНО УПРАВЛЯЕМЫХ МЕХАНИЗМОВ КАРУСЕЛИ | 1991 |
|
RU2027335C1 |
| Устройство для замены гибкого тягового органа подъемно-транспортной машины | 1989 |
|
SU1696380A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2087668C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ УДАРНОГО БУРЕНИЯ СКВАЖИН | 2021 |
|
RU2766989C1 |
| РЕВЕРСИВНЫЙ ПРИВОД ТРАНСПОРТЕРА | 1990 |
|
RU2085067C1 |
| Приспособление к камнерезной машине для выдачи из забоя выпиливаемых в массиве блоков | 1956 |
|
SU114479A1 |
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - расширение функциональных возможностей. Механизм содержит коробчатый корпус, в котором смонтированы и закреплены на подшипниках: входной вал с конической шестерней, два приводных полувала с закрепленными на них по одной цилиндрической шестерни и по одной конической, соединенных с конической шестерней входного вала, несколько силовых валов, на каждом из которых имеются по два концевых участка с ходовой резьбой, по одной укладочной каретке, соединенной и взаимодействующей с концевыми резьбовыми отверстиями своих кронштейнов, подъемная спускная и тормозная электромагнитные муфты, закрепленные на каждом силовом валу, подъемный и спускной поводки, закрепленные своими ступицами и подшипниками на силовом валу, соединенные зубчатыми венцами с соответствующими цилиндрическими шестернями приводных полувалов, а пальцами взаимодействующие со своими электромагнитными муфтами, тормозной поводок, закрепленный на торцовой стенке корпуса и взаимодействующий с тормозной электромагнитной муфтой. На каждом силовом валу закреплено по несколько барабанов, а каждый барабан имеет свой силовой трос, уложенный на его поверхности в один ряд. Каждая каретка имеет укладочные и прижимные ролики каждого троса своего силового вала, по два опорных ролика, расположенных в продольных направляющих пазах дна или крышки корпуса, и по одному электронному датчику положения рабочего органа машины в пространстве, а на торце одного из двух взаимодействующих рабочих органов машины закреплены несколько гибких, изолированных от него, соединенных электропроводами с блоком дистанционного управления электрощупов разной длины. 1 з.п. ф-лы, 7 ил. СО с VI hO fe J VI
Д-Д
| Многопозиционный механизм управления рабочими органами клубнекорнеплодоуборочной машины | 1988 |
|
SU1653566A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
