1. Область техники, к которой относится изобретение
Изобретение относится к прецизионному приборостроению и может быть использовано преимущественно в инерциальных системах управления движением, например, самолетов, ракет, подводных лодок и других объектов.
Для управления необходимо точно измерять кажущееся ускорение объектов. Этому препятствуют погрешности известных акселерометров, обусловленные окружающей температурой и температурой собственного прогрева акселерометра после включения. Из-за температуры изменяется нулевой сигнал акселерометра, что ведет в определении скорости объекта в системах управления к значительным ошибкам, пропорциональным времени движения.
2. Уровень техники
Рассмотрим аналоги предлагаемого изобретения.
2. библиографические данные аналогов изобретения
[1] G01P 15/08, 15/13 Акселерометр компенсационного типа. Патент №2050549 по заявке №3186551/10 от 11.12.87 г. Авторы: Китанин Н.Г., Ивченко Н.Н., Гринь В.В., Рязанов А.А.
Опубликован в бюл. №35 20.12.1995 г.
[2] G01P 15/13 Акселерометр компенсационного типа. Патент №2434233 по заявке №2010108260/28 от 05.03.2010 г. Авторы: Рязанов А.А., Козлов И.Ю., Гусев А.Н., Чемоданов А.Ю.
Опубликован в бюл. №32 20.11.2011 г.
2.2 В акселерометре компенсационного типа по патенту РФ №2050549 общими признаками с предлагаемым изобретением являются чувствительный элемент с магнитоэлектрическим датчиком силы и датчиком положения, усилители датчика силы и датчика положения, масштабный резистор. В данном изобретении [1] компенсация линейной составляющей температурной погрешности масштабного коэффициента акселерометра выполнена подключением преобразователя напряжение - ток параллельно обмотке датчика силы, а направление выходного тока преобразователя выбирают, исходя из знака температурного изменения масштабного коэффициента.
Недостатком этого акселерометра является низкая точность измерения ускорения из-за нулевого сигнала вследствие окружающей температуры.
Наиболее близким к заявляемому изобретению аналогом (прототипом) является изобретение по патенту РФ №2434233 «Акселерометр компенсационного типа» [2]. В этом акселерометре общими признаками с предлагаемым изобретением являются чувствительный элемент с магнитоэлектрическим датчиком силы, датчиком положения и упругим подвесом, усилители датчиков силы и положения, масштабный резистор, первый терморезистор, аналого-цифровой преобразователь, первый источник тока, микроконтроллер, первый шунтирующий резистор.
Этот акселерометр имеет невысокую точность измерений: из-за окружающей температуры и температуры собственного прогрева прибора, на выходе акселерометра появляется значительный нулевой сигнал, что неприемлемо для прецизионных измерений.
3.1 Раскрытие изобретения
3.1 Техническим результатом предлагаемого изобретения является повышение точности акселерометра за счет компенсации нулевого сигнала.
Технический результат достигается совокупностью существенных признаков - введением в акселерометр второго терморезистора, второго шунтирующего резистора, второго источника тока и связей введенных элементов между собой и с элементами прототипа, первый терморезистор размещен вблизи упругого подвеса, а второй терморезистор - вблизи аналого-цифрового преобразователя.
Сущность изобретения заключается в пространственном разделении температурного поля акселерометра на две области, содержащие упругий подвес и аналого-цифровой преобразователь соответственно, в измерении температуры каждой области и в компенсации нулевых сигналов акселерометра по специальному алгоритму.
Пространственное разделение температурного поля позволяет осуществить раздельную компенсацию нулевых сигналов акселерометра, обусловленных в основном упругим подвесом и аналого-цифровым преобразователем, имеющими различные температуры в процессе измерения ускорения, что и обеспечивает повышение точности акселерометра.
3.2 Заявляемое изобретение направлено на решение следующих трех задач:
- измерение температуры первой области (температуры упругого подвеса) и компенсация нулевого сигнала, обусловленного этой температурой;
- формирование специальной схемы получения информации о температуре второй области (о температуре аналого-цифрового преобразователя);
- измерение температуры второй области и компенсация нулевого сигнала, обусловленного этой температурой (температурой аналого-цифрового преобразователя).
Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом [2]: чувствительный элемент с магнитоэлектрическим датчиком силы (ДС), датчиком положения (ДП) и упругим подвесом, усилители датчиков силы и положения, масштабный резистор, первый терморезистор, аналого-цифровой преобразователь, первый источник тока, микроконтроллер, первый шунтирующий резистор.
Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа [2]: введенные второй терморезистор, второй шунтирующий резистор, второй источник тока и связи введенных элементов между собой и с элементами прототипа, первый терморезистор размещен вблизи упругого подвеса, а второй терморезистор - вблизи аналого-цифрового преобразователя.
В настоящем изобретении, в отличие от прототипа, первый терморезистор используется по новому назначению - для решения первой задачи: измерение температуры упругого подвеса и компенсация нулевого сигнала, обусловленного температурой первой области. Источником информации об этой температуре и является первый терморезистор, установленный вблизи упругого подвеса.
Для решения второй задачи - формирование специальной схемы получения информации о температуре второй области (о температуре аналого-цифрового преобразователя), в результате введения в акселерометр новых элементов создан новый канал измерения температуры. Источником информации о температуре аналого-цифрового преобразователя является введенный второй терморезистор.
Этот новый канал измерения температуры используется для решения третьей задачи - измерение температуры второй области (температуры аналого-цифрового преобразователя) и компенсация нулевого сигнала, обусловленного этой температурой.
Решение трех вышеуказанных задач обеспечивает повышение точности акселерометра.
4 Краткое описание чертежей
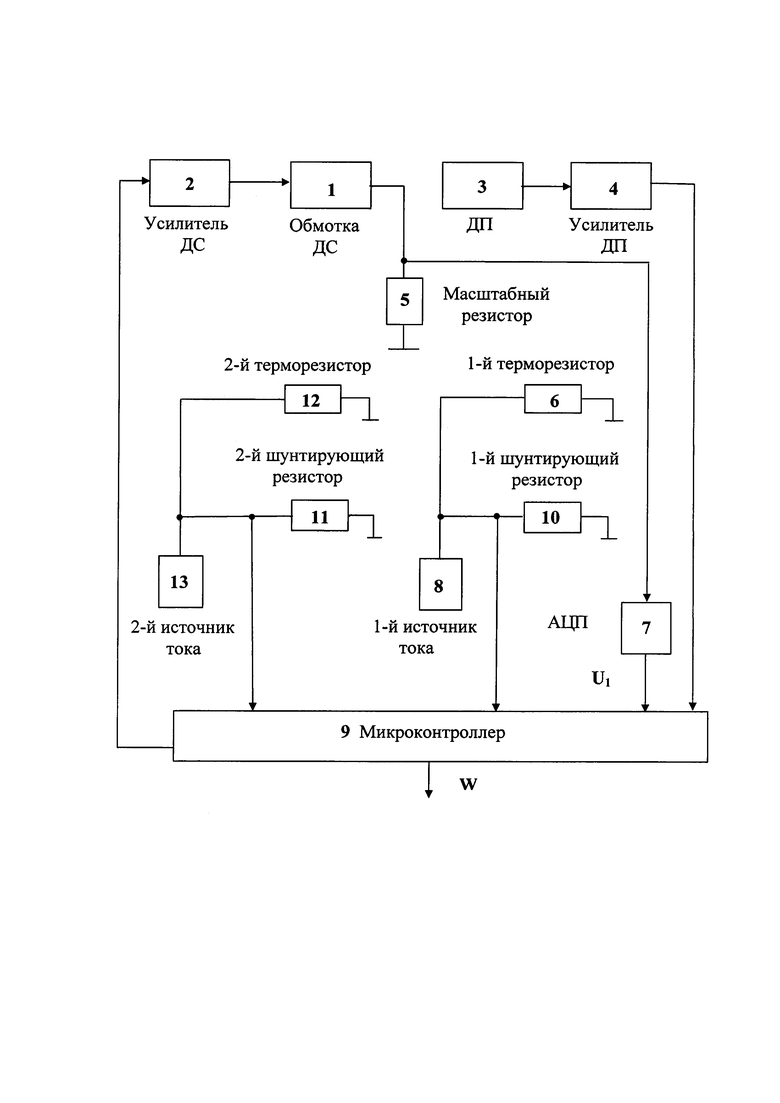
Сущность изобретения поясняется рисунком, где представлена блок-схема предлагаемого устройства.
На рисунке цифрами обозначены:
1 - обмотка датчика силы;
2 - усилитель датчика силы;
3 - датчик положения;
4 - усилитель датчика положения;
5 - масштабный резистор;
6 - первый терморезистор;
7 - аналого-цифровой преобразователь;
8 - первый источник тока;
9 - микроконтроллер;
10 - первый шунтирующий резистор
11 - второй шунтирующий резистор;
12 - второй терморезистор;
13 - второй источник тока.
5 Осуществление изобретения
5.1 Как и в прототипе, предлагаемый акселерометр компенсационного типа, содержит чувствительный элемент с датчиком силы 1 и датчиком положения 3, масштабный резистор 5, усилители датчика силы 2 и положения 4, аналого-цифровой преобразователь 7, микроконтроллер 9, первый терморезистор 6, первый шунтирующий резистор 10, первый источник тока 8, первый вывод обмотки датчика силы 1 соединен с первым выводом масштабного резистора 5, второй вывод обмотки датчика силы 1 подключен к выходу усилителя датчика силы 2, выход датчика положения 3 соединен с входом усилителя датчика положения 4, выход усилителя датчика положения соединен с первым входом микроконтроллера 9, первый вывод масштабного резистора 5 через аналого-цифровой преобразователь (АЦП) 7 подключен к второму входу микроконтроллера 9, выход первого источника тока 8 соединен с выводами первого терморезистора 6, первого шунтирующего резистора 10 и третьим входом микроконтроллера 9, а выход микроконтроллера 9 соединен с входом усилителя датчика силы 2.
В отличие от прототипа, в предлагаемый акселерометр введены блоки 11, 12, 13 и связи блоков: выход второго источника тока 13 соединен с выводами второго терморезистора 12, второго шунтирующего резистора 11 и четвертым входом микроконтроллера 9, причем первый терморезистор размещен вблизи упругого подвеса, а второй терморезистор - вблизи аналого-цифрового преобразователя.
5.2 Измерение ускорения с использованием предлагаемого акселерометра осуществляется следующим образом.
При воздействии на акселерометр ускорения gиз, чувствительный элемент, не показанный на чертеже, отклоняется на упругом подвесе. Это отклонение фиксирует датчик положения 3, выходной сигнал которого после усиления в усилителе 4 поступает на первый вход микроконтроллера 9. Микроконтроллер 9 формирует ШИМ-сигнал, поступающий с выхода микроконтроллера 9 на вход усилителя 2. По этому ШИМ-сигналу усилитель 2 создает ток, поступающий с его выхода в обмотку датчика силы 1 и последовательно включенный с ним масштабный резистор 5. В результате датчик силы прикладывает к чувствительному элементу силу до обнуления выходного сигнала датчика положения (до обнуления отклонения чувствительного элемента).
Ток i, протекающий через датчик силы и масштабный резистор, можно записать в виде:

где Км - масштабный коэффициент акселерометра;
gиз - ускорение, измеряемое акселерометром;
g0 - нулевой сигнал (в единицах ускорения).
Напряжение UВ1 на входе АЦП 7 пропорционально току i:

где Rм - сопротивление масштабного резистора.
Масштабный резистор имеет малый температурный коэффициент сопротивления (ТКС).
С учетом (1), (2) выходной (цифровой) сигнал АЦП 7:

где Кц - коэффициент пропорциональности;
U1g=KцRмKмgиз - цифровой измерительный сигнал;
U1g0=KцRмKмg0 - суммарный цифровой нулевой сигнал, обусловленный температурами областей упругого подвеса и аналого-цифрового преобразователя.
Цифровой сигнал (3) поступает с выхода АЦП 7 на второй вход микроконтроллера 9.
Микроконтроллер 9 корректирует значение U1 с учетом раздельной компенсации нулевых сигналов, составляющих суммарный цифровой нулевой сигнал и обусловленных двумя различными температурами областей упругого подвеса и аналого-цифрового преобразователя.
По скорректированному цифровому сигналу W с выхода микроконтроллера судят об ускорении gиз.
5.3 Измерение и компенсацию нулевого сигнала акселерометра, обусловленного температурой первой области (области упругого подвеса), осуществляют с использованием кусочно-линейной модели следующим образом.
С выхода первого источника тока 8 постоянный ток поступает на первый терморезистор 6, сопротивление которого изменяется пропорционально текущей температуре Tt корпуса терморезистора, расположенного вблизи упругого подвеса чувствительного элемента. В результате на первом шунтирующем сопротивлении формируется напряжение, пропорциональное текущей температуре Tt упругого подвеса. Сигнал, соответствующий температуре Tt, поступает на третий вход микроконтроллера. По команде микроконтроллера проводится калибровка (учет нулевого сигнала) АЦП.
Рабочий температурный диапазон акселерометра (при его изготовлении), соответствующий области упругого подвеса, разделяют на r поддиапазонов (r больше 5) и для каждого поддиапазона температуры от Тi до Ti+1 (i от 1 до r) определяют начальный поправочный коэффициент Pi (для температуры Тi) и конечный поправочный коэффициент Pi+1 (для температуры Ti+1).
Коэффициенты модели температурной компенсации Рi, Тi характеризуют смещение нуля акселерометра (после калибровки нулевого сигнала АЦП) и значение температуры на i-той границе температурного поддиапазона соответственно.
5.4 Измерение и компенсацию нулевого сигнала акселерометра, обусловленного температурой второй области (области аналого-цифрового преобразователя), осуществляют с использованием кусочно-линейной модели следующим образом.
С выхода второго источника тока 13 постоянный ток поступает на второй терморезистор 12, сопротивление которого изменяется пропорционально текущей температуре T2t корпуса терморезистора, расположенного в электронном блоке акселерометра вблизи АЦП. В результате на втором шунтирующем резисторе формируется напряжение, пропорциональное текущей температуре T2t. Сигнал, соответствующий температуре T2t, поступает на четвертый вход микроконтроллера. По команде микроконтроллера проводится калибровка (учет нулевого сигнала) АЦП.
Второй рабочий температурный диапазон акселерометра (при его изготовлении), соответствующий области аналого-цифрового преобразователя, разделяют на s поддиапазонов (s больше 5) и для каждого поддиапазона температуры от T2i до T2i+1 (i от 1 до s) определяют начальный поправочный коэффициент Ei (для температуры T2i) и конечный поправочный коэффициент E2i+1 (для температуры T2i+1). Количество поддиапазонов s для области АЦП может отличаться от количества поддиапазонов r для упругого подвеса.
Коэффициенты модели температурной компенсации Еi, T2i характеризуют смещение нуля акселерометра (после калибровки нулевого сигнала АЦП) и значение температуры АЦП на i-той границе температурного поддиапазона соответственно. Систематическая составляющая нулевого сигнала, обусловленного температурой области АЦП, фиксируется микроконтроллером после калибровки АЦП и исключается из выходной информации.
5.5 Коэффициенты модели компенсации нулевого сигнала акселерометра определяют при его изготовлении на этапе регулирования с использованием термокамеры.
Измерения выходного сигнала акселерометра начинают на границе (верхней или нижней) рабочего температурного диапазона i=1. На каждой температуре, соответствующей i-той (i от 1 до r) границе температурного поддиапазона, акселерометр выдерживают до установившегося режима его работы.
На границе рабочего температурного диапазона i=1:
- включают акселерометр, проводят калибровку АЦП;
- устанавливают акселерометр в положение измерительной осью вертикально вверх, измеряют выходной сигнал АЦП U11;
- устанавливают акселерометр в положение измерительной осью вертикально вниз, измеряют выходной сигнал АЦП U21;
- рассчитывают нулевой сигнал акселерометра, соответствующий границе i=1, по формуле:

Не выключая акселерометр, устанавливают температуру в термокамере, соответствующую границе температурного поддиапазона i=2, и выдерживают акселерометр при этой температуре до установившегося режима его работы.
На границе рабочего температурного диапазона i=2:
- устанавливают акселерометр в положение измерительной осью вертикально вверх, измеряют выходной сигнал АЦП U12;
- устанавливают акселерометр в положение измерительной осью вертикально вниз, измеряют выходной сигнал АЦП U22;
- проводят калибровку АЦП;
- устанавливают акселерометр в положение измерительной осью вертикально вверх, измеряют выходной сигнал АЦП U12k;
- устанавливают акселерометр в положение измерительной осью вертикально вниз, измеряют выходной сигнал АЦП U22k;
- рассчитывают нулевые сигналы по формулам:


где τi=2 - смещение нуля акселерометра на границе i=2 температурного поддиапазона до калибровки АЦП;
 - смещение нуля акселерометра на границе i=2 температурного поддиапазона после калибровки АЦП.
- смещение нуля акселерометра на границе i=2 температурного поддиапазона после калибровки АЦП.
Аналогично проводят измерение выходной информации АЦП и расчет смещения нуля акселерометра на всех последующих температурных границах поддиапазонов, в том числе на i-тых границах второй области от 1 до s.
5.6 Расчет коэффициентов модели компенсации нулевого сигнала акселерометра, обусловленного температурой первой области (температурой упругого подвеса), проводят по формуле:

где U10, U20 - выходные сигналы АЦП в положениях измерительной оси акселерометра вертикально вверх и вниз соответственно при нормальной температуре.
5.7 Расчет коэффициентов модели компенсации нулевого сигнала акселерометра, обусловленного температурой второй области (температурой АЦП), проводят по формулам:


5.8 С учетом линейной зависимости температурной погрешности в выбранных поддиапазонах от T1 до Ti+1 коэффициент компенсации нулевого сигнала, обусловленного температурой первой области (температурой упругого подвеса), имеет вид:

5.9 С учетом линейной зависимости температурной погрешности в выбранных поддиапазонах от T2i до T2i+1 коэффициент компенсации нулевого сигнала, обусловленного температурой второй области (температурой АЦП), имеет вид:

или после преобразований:

где Т20 - начальное значение температуры АЦП после включения акселерометра.
5.10 Результирующий выходной (цифровой) сигнал акселерометра с учетом компенсации нулевого сигнала, обусловленного температурами двух областей, имеет вид:

где K=g/(M0fCe) - коэффициент преобразования выходного сигнала микроконтроллера для формирования требуемой цены единицы младшего разряда выходного кода;
g - ускорение Земного тяготения в месте испытаний акселерометра;
 - расчетное значение выходного сигнала акселерометра при действии ускорения 1g без учета систематической составляющей относительной погрешности масштабного коэффициента;
- расчетное значение выходного сигнала акселерометра при действии ускорения 1g без учета систематической составляющей относительной погрешности масштабного коэффициента;
f - частота опроса АЦП;
Се - цена единицы младшего разряда выходного кода акселерометра.
5.11 Для реализации предлагаемого акселерометра могут быть использованы полупроводниковый терморезистор ТР-1 и шунтирующий резистор С2-29В. В качестве источника тока может быть использована, например, микросхема AD7711.
5.12 Расчет эффективности изобретения
Рассмотрим результаты регулирования в процессе изготовления акселерометра.
В таблице 1 приведены результаты определения коэффициентов М0, Pi и Ei модели компенсации нулевого сигнала акселерометра с учетом измерения температуры двух (Тi первой и T2i второй) областей в диапазоне окружающих температур минус 5…+65°С при отсутствии компенсации.
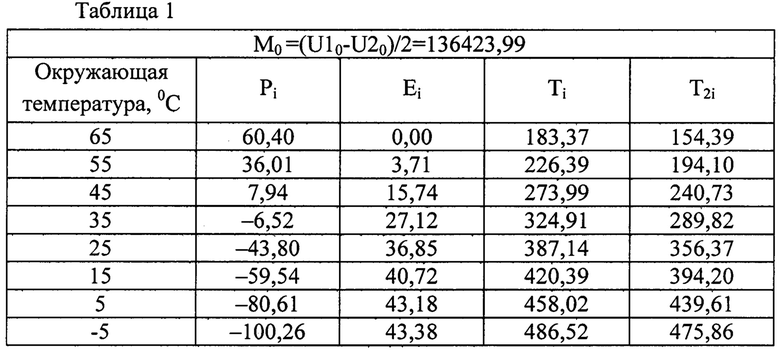
Без компенсации максимальное температурное изменение нулевого сигнала акселерометра в температурном диапазоне минус 5…+65°С (таблица 1):

Максимальная систематическая составляющая нулевого сигнала акселерометра (при автоматическом исключении нулевого сигнала АЦП микроконтроллером) по абсолютной величине в рабочем температурном диапазоне минус 5…+65°С (таблица 1):

Температура области упругого подвеса акселерометра может отличаться от температуры области АЦП на 5…10°С в процессе измерения ускорения.
Проведем оценку эффективности пространственного разделения температурного поля акселерометра на две области (первую и вторую).
Вначале рассмотрим вариант установки в акселерометр только одного датчика температуры (совместно второй терморезистор, второй источник тока, второй шунтирующий резистор) второй области. Температурный коэффициент нулевого сигнала, обусловленного первой областью, в диапазоне минус 5…+65°С составляет (таблица 1):

Тогда отличие температуры области упругого подвеса на ΔТ=10°С от температуры АЦП приведет к появлению некомпенсируемого нулевого сигнала:

Таким образом, установка одного датчика температуры и компенсация нулевого сигнала с его использованием приводит к повышению точности акселерометра в 0,00086/0,00017=5,05 раза.
Проведем оценку эффективности введения компенсации нулевого сигнала с учетом разделения температурного поля акселерометра на две области, где первая область соответствует упругому подвесу, а вторая область соответствует АЦП.
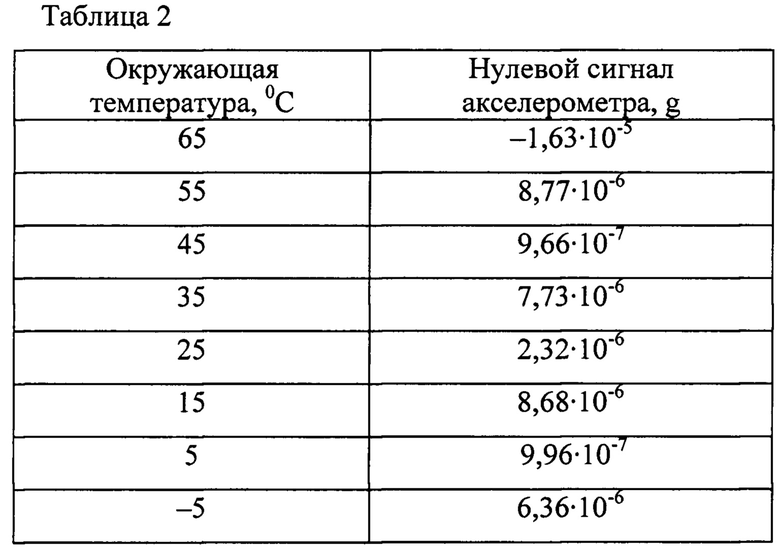
В таблице 2 приведены результаты измерения нулевого сигнала с учетом пространственного разделения температурного поля акселерометра на две области и компенсации нулевых сигналов, обусловленных температурой каждой области, в соответствии с предлагаемым изобретением.
Из таблицы 2 следует, что пространственное разделение температурного поля акселерометра на две области позволяет скомпенсировать нулевой сигнал (в рассматриваемом температурном диапазоне минус 5…+65°С), до величины δτ:

При этом максимальная систематическая составляющая нулевого сигнала не превысила по абсолютной величине (таблица 2):

В результате температурная составляющая нулевого сигнала с учетом (14) и (16) снижена по абсолютной величине в 0,00086/0,00002507=34,3 раза.
При этом систематическая составляющая нулевого сигнала с учетом (15) и (17) снижена в 0,0007349/0,0000163=45 раз.
Таким образом, предлагаемое изобретение позволяет, по сравнению с прототипом, существенно повысить точность рассматриваемого прибора и, тем самым, создать акселерометр, обладающий высокой точностью в широком диапазоне рабочих температур.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР КОМПЕНСАЦИОННОГО ТИПА | 2010 |
|
RU2434233C1 |
| ДАТЧИК ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2010 |
|
RU2442964C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ БЛОКА ОРИЕНТАЦИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ | 2013 |
|
RU2548056C1 |
| АВТОНОМНЫЙ ТЕПЛОСЧЕТЧИК И СПОСОБ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2694277C1 |
| ИЗМЕРИТЕЛЬ УГЛОВОГО ПОЛОЖЕНИЯ ИЗДЕЛИЯ | 2011 |
|
RU2491507C1 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОРРЕКТИРОВКИ ПЕРЕДАЮЩЕЙ ФУНКЦИИ ДАТЧИКА ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2003 |
|
RU2247325C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ ГАЗА | 2016 |
|
RU2665753C2 |
| СПОСОБ ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2010 |
|
RU2436048C1 |
| ТЕРМОМЕТРИЧЕСКАЯ КОСА И СПОСОБ ЕЕ КАЛИБРОВКИ | 2008 |
|
RU2389984C2 |
| ДАТЧИК ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ УСТРОЙСТВА СЕЛЕКТИВНОГО ОПРЕДЕЛЕНИЯ ПОВРЕЖДЕННОГО ПРИСОЕДИНЕНИЯ И РАССТОЯНИЯ ОТ ПОДСТАНЦИИ ДО МЕСТА ВОЗНИКНОВЕНИЯ ОДНОФАЗНОГО ЗАМЫКАНИЯ НА ЗЕМЛЮ В РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЯХ 6-35 КВ | 2023 |
|
RU2812783C1 |
Изобретение относится к точному приборостроению и может быть использовано преимущественно в прецизионных инерциальных системах управления движением, например, самолетов, ракет, подводных лодок и других объектов. Сущность изобретения заключается в пространственном разделении температурного поля акселерометра на две области, содержащие упругий подвес и аналого-цифровой преобразователь соответственно, в измерении температуры каждой области и в компенсации нулевых сигналов акселерометра по специальному алгоритму. Технический результат - повышение точности акселерометра. 1 з.п. ф-лы, 2 табл., 1 ил.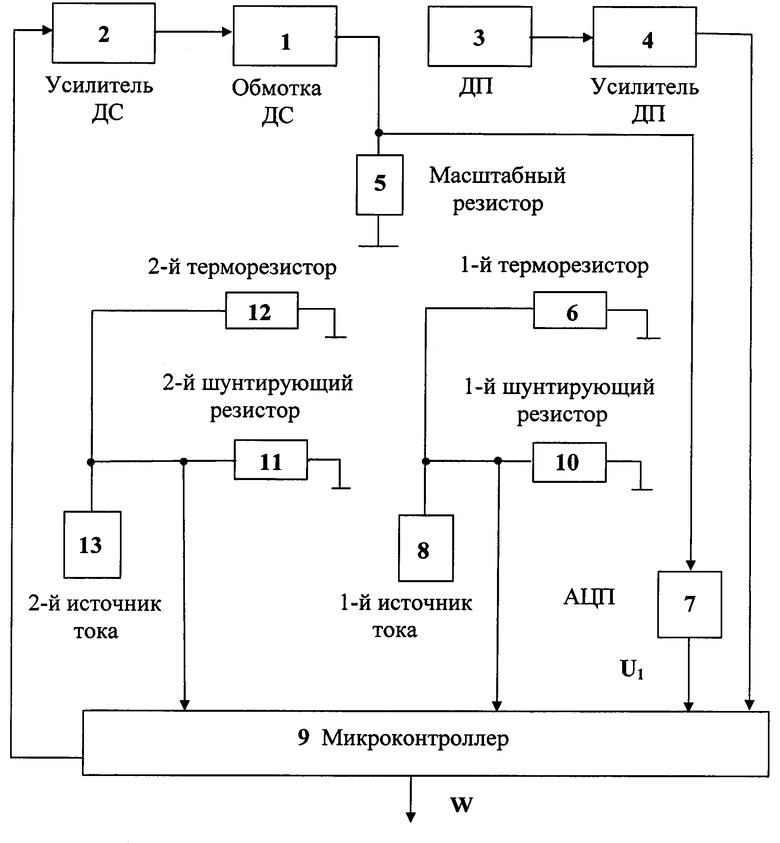
1. Акселерометр компенсационного типа, содержащий чувствительный элемент с магнитоэлектрическим датчиком силы, датчиком положения и упругим подвесом, масштабный резистор, усилители датчика силы и положения, аналого-цифровой преобразователь, микроконтроллер, первый терморезистор, первый шунтирующий резистор, первый источник тока, первый вывод обмотки датчика силы соединен с первым выводом масштабного резистора, второй вывод обмотки датчика силы подключен к выходу усилителя датчика силы, выход датчика положения соединен с входом усилителя датчика положения, выход усилителя датчика положения соединен с первым входом микроконтроллера, первый вывод масштабного резистора через аналого-цифровой преобразователь подключен ко второму входу микроконтроллера, выход первого источника тока соединен с выводами первого терморезистора, первого шунтирующего резистора и третьим входом микроконтроллера, а выход микроконтроллера соединен с входом усилителя датчика силы, отличающийся тем, что в него дополнительно введены второй терморезистор, второй шунтирующий резистор и второй источник тока, причем выход второго источника тока соединен с выводами второго терморезистора, второго шунтирующего резистора и четвертым входом микроконтроллера.
2. Акселерометр компенсационного типа по п. 1, отличающийся тем, что первый терморезистор расположен вблизи упругого подвеса, а второй терморезистор - вблизи аналого-цифрового преобразователя.
| АКСЕЛЕРОМЕТР КОМПЕНСАЦИОННОГО ТИПА | 2010 |
|
RU2434233C1 |
| АКСЕЛЕРОМЕТР КОМПЕНСАЦИОННОГО ТИПА | 1988 |
|
RU2041465C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1980 |
|
SU1010950A1 |
| СПОСОБ ПАНКРЕАТОДУОДЕНАЛЬНОЙ РЕЗЕКЦИИ ПРИ МЕСТНОРАСПРОСТРАНЕННОМ РАКЕ ПЕРИАМПУЛЯРНОЙ ОБЛАСТИ С ОБШИРНОЙ ОПУХОЛЕВОЙ ИНВАЗИЕЙ МАГИСТРАЛЬНЫХ ВЕН МЕЗЕНТЕРИКО-ПОРТАЛЬНОЙ СИСТЕМЫ И НАЛИЧИЕМ ДВУХ ОСНОВНЫХ СТВОЛОВ ВЕРХНЕЙ БРЫЖЕЕЧНОЙ ВЕНЫ | 2006 |
|
RU2317018C1 |
| US 5220831 A1, 22.06.1993. | |||

