СП
С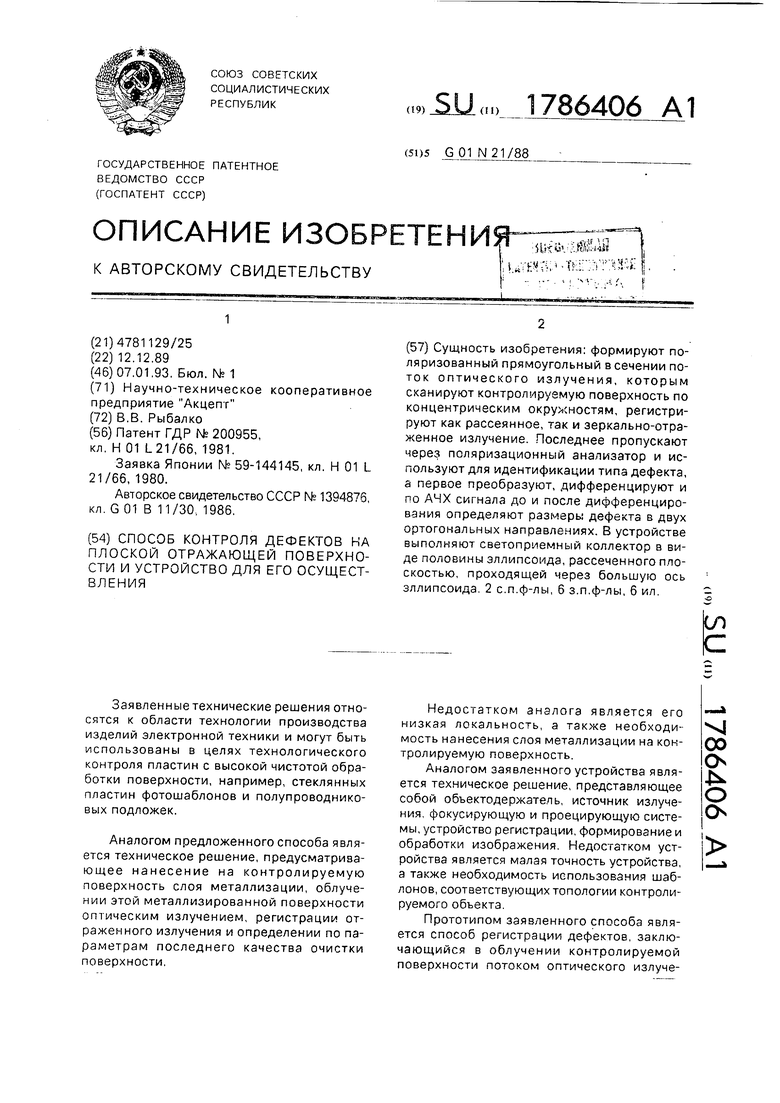





| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ультразвукового томографического контроля изделий | 1990 |
|
SU1817019A1 |
| Фотоэлектрическое устройство контроля дефектов поверхности | 1979 |
|
SU855453A1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УЗЛОВ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2480741C1 |
| Устройство для контроля металлизированных отверстий печатных плат | 1991 |
|
SU1793208A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДОВ | 1992 |
|
RU2018817C1 |
| Устройство для контроля качества обработки поверхности изделия | 1991 |
|
SU1778522A1 |
| СПОСОБ РЕГИСТРАЦИИ ДИФФУЗНО ОТРАЖЕННОГО ИЛИ ДИФФУЗНО РАССЕЯННОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2458361C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ МИКРОДЕФЕКТОВ В ЛИСТОВОМ СТЕКЛЕ | 2009 |
|
RU2390770C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ КАПИЛЛЯРНОГО КРОВОТОКА | 2002 |
|
RU2231286C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |

Сущность изобретения: формируют поляризованный прямоугольный в сечении поток оптического излучения, которым сканируют контролируемую поверхность по концентрическим окружностям, регистрируют как рассеянное, так и зеркально-отраженное излучение. Последнее пропускают через поляризационный анализатор и используют для идентификации типа дефекта, а первое преобразуют, дифференцируют и по АЧХ сигнала до и после дифференцирования определяют размерь: дефекта в двух ортогональных направлениях. В устройстве выполняют светоприемный коллектор в виде половины эллипсоида, рассеченного плоскостью, проходящей через большую ось эллипсоида. 2 с.п.ф-лы, 6 з.п.ф-лы, 6 ил.
Заявленные технические решения относятся к области технологии производства изделий электронной техники и могут быть использованы в целях технологического контроля пластин с высокой чистотой обработки поверхности, например, стеклянных пластин фотошаблонов и полупроводниковых подложек.
Аналогом предложенного способа является техническое решение, предусматривающее нанесение на контролируемую поверхность слоя металлизации, облучении этой металлизированной поверхности оптическим излучением, регистрации отраженного излучения и определении по параметрам последнего качества очистки поверхности.
Недостатком аналога является его низкая локальность, а также необходимость нанесения слоя металлизации на контролируемую поверхность.
Аналогом заявленного устройства является техническое решение, представляющее собой объектодержатель, источник излучения, фокусирующую и проецирующую системы, устройство регистрации, формирование и обработки изображения. Недостатком устройства является малая точность устройства, а также необходимость использования шаблонов, соответствующих топологии контролируемого объекта.
Прототипом заявленного способа является способ регистрации дефектов, заключающийся в облучении контролируемой поверхности потоком оптического излуче ч|
со
О 4 О
Os
ния, перемещении пятна этого потока по поверхности, выполнении с помощью тракта обработки сигнала, информационного цикла, предусматривающего преобразование рассеянного дефектом излучения в электрический сигнал, фиксацию параметров этого зарегистрированного сигнала и определение по параметрам сигнала наличия и характеристик дефекта.
Недостатком способа является сравни- тельно низкая достоверность контроля дефектов. Это обстоятельство обусловлено рядом факторов. Во-первых, способ не позволяет определить ориентацию дефекта, то есть в какую сторону он вытянут. Во-пер- вых, при регистрации малых по размеру дефектов, то есть дефектов, имеющих диаметр много меньший, чем диаметр пятна зондирующего излучения, значительный фоновый поток диффузно рассеянный от поверхно- сти объекта и попавший на приемное окно преобразователя, существенно уменьшает отношение сигнал/шум информационного сообщения, то есть снижает достоверность контроля дефектов. В-третьих, ненулевая кривизна фронта пятна излучения, перемещающегося по поверхности, а также различие длин хорд, вдоль которых это пятно пересекают микродефекты, приводит к появлению ошибок, связанных с рассеянием, на котором микродефект проходит от центра пятна. И, наконец, линейная скорость движения пятна относительно контролируемой поверхности будет меняться в зависимости от радиуса траектории движения. Это также является источником погрешности контроля, то есть снижения его достоверности. Кроме того, способ не позволяет идентифицировать тип дефекта - микрогеометрия или включение, что также снижает достоверность контроля.
Прототипом предложенного устройства является устройство для регистрации дефектов на плоской отражающей поверхности (3), состоящее из источника излучения - лазера, узел фокусировки излучения, коллекторную систему, преобразователь оптического излучения в электрический сигнал и систему регистрации.
Устройству-прототипу присущи те же недостатки, что и способу-прототипу и, в первую очередь, - недостаточная достоверность контроля, обусловленная малым отношением сигнал/шум обрабатываемого сигнала, формой пятна, невозможностью определения ориентации дефекта, а также типа дефекта (микрогеометрической неоднородности или построенного включения).
Целью изобретения является повышение достоверности контроля дефектов.
Сущность предложенного способа заключается в следующей совокупности существенных признаков.
Признак, связанный с формированием оптического потока, имеющего прямоугольное пятно на облучаемой плоскости в совокупности с признаком, определяющим ориентировку пятна относительно направления его перемещения, обеспечивает повышение достоверности дефектов, имеющих малые линейные размеры, то есть протяженность соизмеримую с длиной волны оптического потока. Эта цель достигается благодаря следующим свойствам, проявляемым указанными признаками в заявленной совокупности признаков. Во-первых, сохраняя протяженность сканируемой полосы, которая равна при заявленной ориентации пучка, длине пятна, уменьшается отношение протяженности пятна в направлении перемещения к размеру тестируемого дефекта. Из теории сканирующих систем известно, что разрешение изображения, то есть качество видеосигнала, определяющее достоверность регистрации малых частиц, имеет обратную зависимость от этого отношения. При прочих равных условиях снижение этого отношения позволяет увеличить крутизну фронта кривой набегания пятна на дефект, то есть с большей достоверностью выделить участок видеосигнала, соответствующий границам дефекта. Во-вторых, оставляя неизменной длину пятна и уменьшив его ширину (в прототипе пятно круглое) снижается площадь облучения, а следовательно, снижается амплитуда шумового сигнала, обусловленная диффузным рассеянием зондирующего излучения бездефектной поверхностью. Например, если взять за исходное значение размер пятна в прототипе 50 мкм, то использование прямоугольного пятна с длиной 50 мкм и шириной 2 мкм позволит уменьшить площадь облучения с 2500 мкм до 100 мкм. Соответственно в 25 раз снизится амплитуда диффузной составляющей шума, то есть повысится достоверность регистрируемого сигнала, характеризующего дефект поверхности. 1/1 наконец, как будет показано ниже, указанная совокупность признаков обеспечивает возможность контролировать не только усредненный размер дефекта, но и его протяженность в двух ортогональных направлениях, что также повышает достоверность. Признак, обуславливающий время перемещения по окружности, является необходимым с точки зрения достижения цели изобретения. Так, в частности, в прототипе равномерность облучения поверхности обеспечивалось только за счет
перекрытия перемещающимся световым пятном всей контролируемой поверхности. Однако, по мере приближения к центру объекта, линейная скорость относительного движения пятна по поверхности уменьшается. В результате, время набегания пятна на дефект уменьшается. То есть, одинаковые по размерам дефекта, но лежащие на разных расстояниях от центра вращения поверхности будут облучаться разное время. Это приводит к искажению градиента видеосигнала, получаемого от дефекта, а следовательно, вызывает в нашем случае ошибки измерения, так как измеренная длина одного и того же дефекта будет тем больше, чем дальше от центра вращения он будет лежать. Кроме того, изменение времени облучения дефектов, лежащих на разных участках поверхности, приводит к тому, что периферийный дефектам будет соответствовать сигнал с меньшим отношением сигнал/шум, то есть эти дефекты будут контролироваться с меньшей достоверностью. Для предотвращения всех указанных ошибок скорость вращения, то есть время одного оборота меняется в зависимости от положения пятна на поверхности пластины относительно центра ее вращения. Причем значение tn выбирается, исходя из быстродействия системы таким образом, чтобы в оптимальной ситуации все дефекты, лежащие на поверхности, были зарегистрирова- ны. С целью обеспечения указанных условий, существенных с точки зрения цели изобретения, в п.1 формулы введено соотношение, определяющее изменение времени затрагиваемого на полный оборот поверхности, в зависимости от ряда параметров. Среди последних, кроме положения пятна оптического излучения на поверхности, введено отношение временной характеристики пропорциональной длительности информационного цикла к размеру минимально регистрируемого дефекта. Причем это отношение нормировано коэффициентом I. Отношение т/дт определяет скорость считывания каждого дефекта. Коэффициенту является поправочной величиной, учитывающей ожидаемую плотность дефектов. Введение этого коэффициента в рассматриваемое выражение позволяет по прогнозируемой плотности дефектов на поверхности увеличить производительность, то есть сократить время облучения поверхности оптическим излучением. В то же время, рассматриваемая ниже совокупность признаков, изложенная в п.2 формулы, позволяет избежать ошибки контроля, вызванной неверным выбором значения//.
Далее, по порядку выполнения следует признаки, связанные с регистрацией максимальной амплитуды недифференцированного сигнала с последующим его
дифференцированием и измерением протяженности пятна в ортогональных направлениях. Существенной, с точки зрения достижения цели изобретения, является последовательность выполнения этих опера0 ций. В противном случае, например, при выполнении первоначально операции дифференцирования, исключается возможность определить протяженность дефекта в направлении перпендикулярном к линии
5 перемещения пятна.
Признак, связанный с дифференцированием электрического сигнала, преобразованного из оптического излучения рассеянного дефектом, и признак, обус0 ловливающий выделение импульсов соответствующих передней и задней границам дефекта, обеспечивают в совокупности возможность прецизионного определения протяженности дефекта в заданном на5 правлении, з частности, в направлении, совпадающем с перемещением пятна по поверхности.
Признак, определяющий порядок вычисления протяженности дефекта в направ0 лении перемещения пятна, необходим с точки зрения достижения цели изобретения, так как обеспечивает работоспособность способа в целом.
Признак, связанный с измерением мак5 симальной и минимальной амплитуды недифференцированного регистрируемого сигнала, обеспечивает возможность контроля максимального размера дефекта в нормальном по отношению к указанному выше
0 направлению. Таким образом, перечисленная выше совокупность признаков обеспечивает повышение достоверности контроля дефектов за счет раздельного определения их протяженности в двух ортогональных на5 правлениях.
До получения информации о размере дефекта в третьем измерении используется совокупность признаков, предусматривающая регистрацию амплитуды отраженного
0 от поверхности излучения. Эта совокупность признаков, уточненная в п.5 формулы, позволяет установить, имеет ли дефект третье измерение и если имеет, то является ли он гомофазным и гетерофазным,
5Совокупность признаков, изложенная в п.2 формулы, уточняет режим, определяющий время перемещения пятка по окружности на поверхности и обеспечивает усиление достигаемого положительного эффекта. Это усиление обеспечивается за счет
исключения ошибок контроля, возникающих при высокой плотности дефектов, то есть в ситуации, когда соседние дефекты расположены близко друг к другу.
Совокупность признаков, изложенных в п.З формулы, является уточняющей и необходима для конкретизации процесса выделения границ дефекта при контроле дефектов, имеющих переменный знак первой производной функции, описывающей границу дефектов. Использование этой совокупности признаков в данном конкретном случае позволяет исключить ошибки контроля, а следовательно, повысить достоверность последнего. Ошибки при контроле дефектов сложной формы возникают из-за того, что такой дефект в отличие от простого (круглого или овального) даст несколько импульсов при дифференцировании видеосигнала. Эта ситуации иллюстрируется схемой, приведенной на фиг.2. Без наличия признаков по п.З формулы такой дефект будет идентифицироваться как два рядом расположенных дефекта.
Совокупность признаков, изложенных в п.4 формулы, обеспечивает усилие положительного эффекта, достигаемого основной совокупностью признаков. Это усилие осуществляется благодаря оптимизации отношения сигнал/шум, регистрируемого сигнала, которая в конечном итоге и приводит к повышению достоверности контроля дефектов.
Так, в частности, амплитуда полезного сигнала пропорциональна
lc /g 0,25 ,
где /д - коэффициент рассеяния от дефекта, шумовая составляющая, приходящая на вход преобразователя оптического излучения
Im /r.g L Д,
где rjr.q - коэффициент диффузного рассеяния бездефектной поверхности
L и Д- длина и ширина пятна, тогда отношение сигнал/шум на входе в преобразователь
Г/д 0,25 Л: Sm /Г}г.д L Д.
Эта величина не должна превышать до- пустимого значения отношения сиг-нал/шум (Кс.м.) тракта обработки сигнала, т.е.:
71 0,25 /д .д L Д К с.м.
В то же время длина пятна лимитирована радиусом области не содержащей дефектов с заданной вероятностью. В зтг л случае можно говорить о том, что с вероятностью Р круг с радиусом Rp не содержит дефектов, тогда этот радиус берется за минимальный радиус внутренней окружности, являющейся наименьшей из набора концентрических окружностей. Разность в линейных скоростях.
Выбор признака, определяющего соотношение длины и ширины пятна осуществлен с учетом следующих факторов. Разность в линейных скоростях движения противоположных концов пятна, обусловленная тем, что они движутся по разным траекториям, приводит к разной длительности набегания на дефект. В результате, одинаковые дефекты, пересекающие пятно в разных его концах, будут выглядеть как дефекты с разной протяженностью. Время набегания будет
(5т
Т1
VCK1
; Т2 3m/VCK2
5 0
5
5
0
5
0
VCKI 2яНр/гп; 2 7r(Rp- L)/tn tn - время оборота пластины вокруг оси.
Если задан минимальный размер регистрируемого дефекта 3min, а следовательно и время его сканирования.
Tmin, ТО Г1 - Г2 Tmin
дд
Тт7( tn - Tmin
Tmin 1 tn О Tn 5
111
L
R p - L2 71 Tm in
Сущность совокупности признаков по п.5 была сформулирована выше. Дополнительно следует отметить, что данная уточняющая совокупность признаков представляет собой один из вариантов реализации части признаков, изложенных в п.1 формулы. Достижение дополнительного положительного эффекта, сформулированного в п.5, обеспечивается благодаря поляризационному эффекту. Отражаясь от поверхности, меняет свою поляризацию на величину, обусловленную в первую очередь материалом поверхности. Этот эффект эксперт легко может наблюдать с помощью поляризационного фильтра, используемого в любительской фотографии. На освещенной поверхности, если смотреть на нее сквозь фильтр, исчезают блики от чистой поверхности, загрязненные участки выглядят ярче. Наличие на поверхности дефекта, представляющего собой инородное включение, например, зашлифованную грязь или фазовое включение, приведет к повороту плоскости поляризации отраженного луча на угол, отличающийся от поворота плоскости поляризации луча, отраженного от
бездефектной области. Тогда в заявленной совокупности признаков удастся идентифицировать такой дефект по увеличению сигнала, преобразованного из потока отраженного излучения. В том случае, если дефект тополо- гического характера, например, царапина, его наличие приведет к уменьшению указанного сигнала. Однако, возможна и третья ситуация, изложенная в п.6 формулы, когда загрязнение имеет рельеф, например, частичка пыли, лежащая на поверхности. Ее характеристики могут быть такими, что уменьшение амплитуды отраженного сигнала, вызванное геометрией, будет компенсироваться увеличением сигнала зз счет свойств материала пыли. Однако и в этом случае заявленная совокупность позволяет идентифицировать тип дефекта, как это описано в формуле изобретения. Таким образом, совокупность признаков, изложенная в п.5 формул ы, проявляет новое свойство - позволяет идентифицировать тип дефекта, причем это новое свойство не следует из свойств каждого из отдельно взятых признаков.
Сущность заявленного устройства ха- рактеризуется следующей совокупностью существенных признаков.
Введение в состав устройства блока предварительной обработки сигнала АЦП и вычислительного устройства обеспечивает возможность получения данных о геометрических соотношениях контролируемых дефектов. С этой же целью в состав устройства введены поляризатор, поляризационный фильтр и дополнительный преобразователь оптического излучения с усилителем.
Для обеспечения заданной формы пятна излучения на поверхности и его ориентации, устройство снабжено щелевой диафрагмой, а узел фокусировки в частном случае может быть выполнен в виде цилиндрической линзы,
Признак, связанный с выполнением светоприемного коллектора в виде половины эллипсоида, а также признаки, опреда- ляющие пространственное положение объектодержателя, узла фокусировки и обоих преобразователей, обеспечивают максимальную эффективность сбора оптического излучения. Причем такая конструкция по- зволяет эффективно разделять отраженное и диффузно-рассеянного излучения, что также необходимо для достижения цели изобретения. При заявленном конструктивном выполнении перечисленных элементов все диффузно-рассеянные в первом фокусе эллипсоида излучение будет сфокусировано им во втором фокусе, то есть на приемном окне преобразователя. В то же время отраженное излучение выйдет за пределы эллипсоида и лишь там попадает в фильтр. В этом случае даже та незначительная часть этого излучения, которая будет отражена поляризационным фильтром, не попадает на приемное окно основного преобразователя.
В п.8 приведена совокупность признаков, развивающая существенный признак п.7 формулы, связанный с выполнением коллектора в виде эллипсоида. Ориентация эллипсоида относительно объектодержателя, во-первых, предотвращает экранировку части рассеянного излучения от основного преобразователя, а, во-вторых, обеспечивает возможность облучения всей поверхности объектодержателя. Этой же цели служит и признак, определяющий геометрические соотношения и взаимное расположение эллипсоида, преобразователя и объектодержателя.
На фиг. 1 приведены три варианта схемы облучения поверхности, содержащей дефект, движущимся потоком оптического излучения, причем варианты отличаются соотношением размера дефекта и размера се- чэния потока излучения.
На фиг. 2 приведены осциллограммы, полученные при регистрации излучения рассеянного от дефекта для трех указанных выше вариантов.
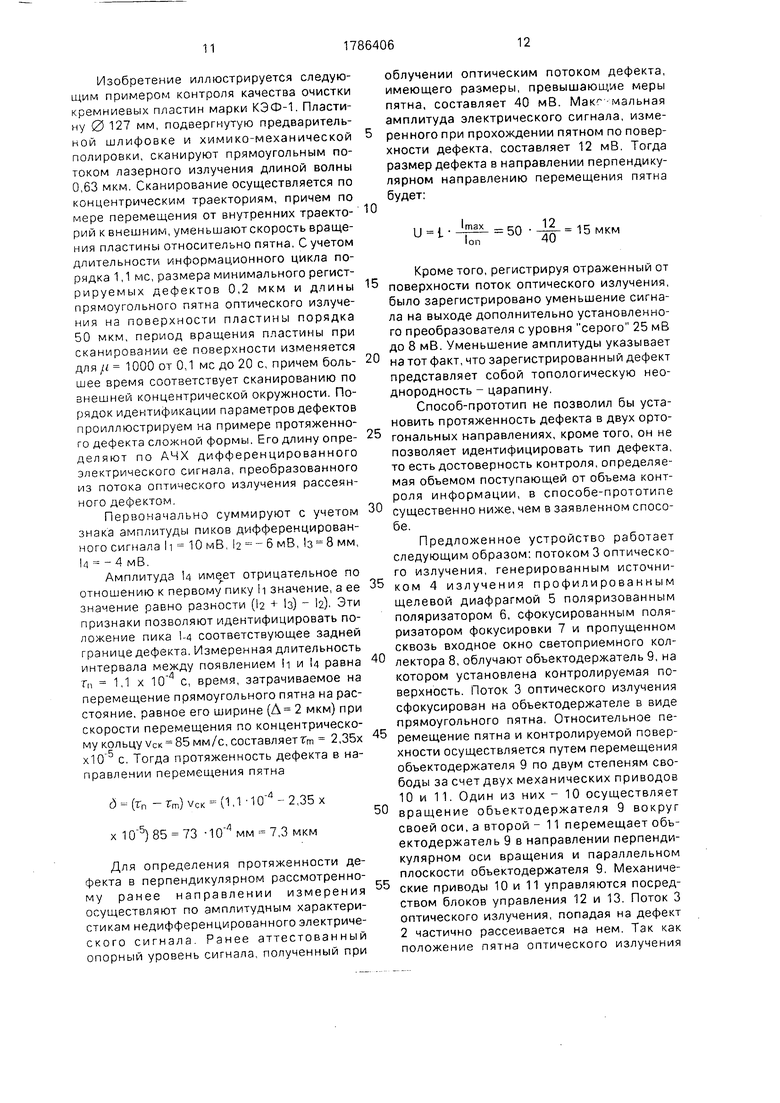
На фиг. 3 приведены формы осциллограмм после дифференцирования сигнала.
На фиг. 4 изображена схема облучения поверхности, содержащей дефект сложной формы, а также приведена осциллограмма, полученная при регистрации рассеянного дефектом излучения.
На фиг. 5 приведена структурная схема заявленного устройства.
На фиг. 6 изображена структурная схема варианта выполнения блока предварительной обработки преобразованного сигнала.
На фигурах обозначены: контролируемая поверхность 1; дефект 2; поток оптического излучения 3; источник оптического излучения 4: щелевая диафрагма 5; поляризатор 6; узел фокусировки 7; светоприемный коллектор 8; объектодержатель 9; механические приводы 10, 11; блоки управления механизмов приводов 12, 13; преобразователь (основной) оптического излучения 14; усилители 15, 21; блок предварительной обработки преобразованного сигнала 16; вычислительное устройство 17; блок цифроаналогового преобразования (ЦАЛ) 18; поляризационный фильтр 19; дополнительный преобразователь оптического излучения 20; дифференцирующая цепочка 22; таймер 23; блок аналого- цифрового преобразования (АЦП) 24; анализатор импульсов 25.
Изобретение иллюстрируется следующим примером контроля качества очистки кремниевых пластин марки КЭФ-1. Пластину 0 127 мм, подвергнутую предварительной шлифовке и химико-механической полировки, сканируют прямоугольным потоком лазерного излучения длиной волны 0,63 мкм. Сканирование осуществляется по концентрическим траекториям, причем по мере перемещения от внутренних траекто- рий к внешним, уменьшаютскорость вращения пластины относительно пятна, С учетом длительности информационного цикла порядка 1,1 мс, размера минимального регист- рируемых дефектов 0,2 мкм и длины прямоугольного пятна оптического излучения на поверхности пластины порядка 50 мкм, период вращения пластины при сканировании ее поверхности изменяется для/г 1000 от 0,1 мс до 20 с, причем боль- шее время соответствует сканированию по внешней концентрической окружности. Порядок идентификации параметров дефектов проиллюстрируем на примере протяженного дефекта сложной формы. Его длину опре- деляют по АЧХ дифференцированного электрического сигнала, преобразованного из потока оптического излучения рассеянного дефектом.
Первоначально суммируют с учетом знака амплитуды пиков дифференцированного сигнала 11 10 мВ, 2 - 6 мВ, з 8 мм, U -4 мВ.
Амплитуда U имеет отрицательное по отношению к первому пику Н значение, а ее значение равно разности (la + з) - h). Эти признаки позволяют идентифицировать положение пика 1-4 соответствующее задней границе дефекта. Измеренная длительность интервала между появлением И и Ц равна Тп 1,1 х 10 с, время, затрачиваемое на перемещение прямоугольного пятна на расстояние, равное его ширине (А 2 мкм) при скорости перемещения по концентрическому кольцу VCK 85 мм/с, составляетТт 2,35х хЮ с. Тогда протяженность дефекта в направлении перемещения пятна
д (тп -тт) vCK (1,1 ,35х х )85 73 7,3мкм
Для определения протяженности дефекта в перпендикулярном рассмотренному ранее направлении измерения осуществляют по амплитудным характеристикам недифференцированного электриче- ского сигнала. Ранее аттестованный опорный уровень сигнала, полученный при
облучении оптическим потоком дефекта, имеющего размеры, превышающие меры пятна, составляет 40 мВ. Максимальная амплитуда электрического сигнала, измеренного при прохождении пятном по поверхности дефекта, составляет 12 мВ. Тогда размер дефекта в направлении перпендикулярном направлению перемещения пятна будет:
1г
50
12
40
15 мкм
5 0 15 0 5
0
5 0 5
0
5
Кроме того, регистрируя отраженный от поверхности поток оптического излучения, было зарегистрировано уменьшение сигнала на выходе дополнительно установленного преобразователя с уровня серого 25 мВ до 8 мВ. Уменьшение амплитуды указывает на тот факт, что зарегистрированный дефект представляет собой топологическую неоднородность - царапину.
Способ-прототип не позволил бы установить протяженность дефекта в двух ортогональных направлениях, кроме того, он не позволяет идентифицировать тип дефекта, то есть достоверность контроля, определяемая объемом поступающей от объема контроля информации, в способе-прототипе существенно ниже, чем в заявленном способе.
Предложенное устройство работает следующим образом: потоком 3 оптического излучения, генерированным источником 4 излучения профилированным щелевой диафрагмой 5 поляризованным поляризатором 6, сфокусированным поляризатором фокусировки 7 и пропущенном сквозь входное окно светоприемного коллектора 8, облучают объектодержатель 9, на котором установлена контролируемая поверхность. Поток 3 оптического излучения сфокусирован на объектодержателе в виде прямоугольного пятна. Относительное перемещение пятна и контролируемой поверхности осуществляется путем перемещения объектодержателя 9 по двум степеням свободы за счет двух механических приводов 10 и 11. Один из них - 10 осуществляет вращение объектодержателя 9 вокруг своей оси, а второй - 11 перемещает объектодержатель 9 в направлении перпендикулярном оси вращения и параллельном плоскости объектодержателя 9. Механические приводы 10 и 11 управляются посредством блоков управления 12 и 13. Поток 3 оптического излучения, попадая на дефект 2 частично рассеивается на нем. Так как положение пятна оптического излучения
совпадает с положением первого фокуса фотоприемного коллектора 8, выполненного в виде эллипсоида, то все рассеянное дефектом 2 излучение будет сфокусировано эллипсоидом 8 во втором его фокусе, где установлен основной преобразователь 14 оптического излучения. Сигнал с выхода преобразователя 14 поступает через усилитель 15 в блок 16 предварительной обработки преобразованного сигнала, с выхода которого сигнал поступает на вход вычислительного устройства 17. В наиболее простом варианте блок 16 представляет собой аналого-цифрового преобразования. Сигнал, поступающий в устройство 17, прохо- дит обработку и по результатам этой обработки вычисляется протяженность каждого дефекта в двух ортогональных направлениях. Отраженное от обьектодержателя оптическое излучение, проходя сквозь вы- ходное окно светоприемного коллектора 8 и поляризационный фильтр 19, регистрируется дополнительным преобразователем 20 оптического излучения. Электрический сигнал с выхода последнего, через усилитель 21 поступает на второй вход блока 16 предварительной обработки преобразованного сигнала и далее поступает в устройство 17, где осуществляется обработка сигнала и идентификация типа дефекта. Вся получен- ная информация о размерах, ориентации и типах выявленных дефектов с выхода вычислительного устройства 17, подается на внешние устройства, например, ВКУ и др. В то же время амплитудно-частотные характе- ристики сигнала, поступающие с выхода преобразователя 14 используются для корректировки программы управления приводами 10 и 11, которое осуществляется путем подачи управляющих сигналов с выхода ус- тройства 17 через цифроаналоговый преобразователь 18, на входы блоков управления 11 и 12.
В частном случае для повышения производительности устройства блок 16 предва- рительной обработки преобразованного сигнала может быть выполнен в виде устройства, изображенного на фиг. 6. Тогда сигнал с выхода усилителя 15 поступает на вход анализатора импульсов 25 и в диф- ференцирующую цепочку 22. В дифференцирующей цепочке 22 аналоговым путем осуществляется дифференцирование электрического сигнала, далее с помощью таймера 23 осуществляется измерение ин- тервалов между импульсами. В случае, если интервал не уменьшен сверх допустимого значения, импульсы проходят в анализатор 25, где происходит их аналоговое сравнение, запись выделенных уровней недифференцированного сигнала и суммирование импульсов дифференцированного сигнала, а результирующие сигналы далее поступают через АЦП 24 в устройство 17. То есть, тем самым операции дифференцирования и суммирования импульсов дифференцированного сигнала, а также операции выделения максимальных значений амплитуд, соответствующих дефектам недифференцированного сигнала осуществляется аналоговым путем, то есть более производительно.
В том случае, если временной интервал между импульсами дифференцированного сигнала меньше допустимого значения, определяемого длительностью информационного цикла, таймер 23 генерирует корректирующий сигнал, который через анализатор 25 и АЦП 24, поступает в устройство 17. Корректирующий сигнал одновременно запирает вход анализатора импульсов 25, который открывается через промежуток времени, равный периоду оборота обьектодержателя 9 вокруг своей оси. Вычислительное устройство 17, в свою очередь, корректирует траекторию движения обьектодержателя 9. В частности, с помощью сигнала от устройства 17, подаваемого через АЦП 18 на блок управления 13 линейным перемещением обьектодержателя. Под действием этого сигнала линейное перемещение объектодержателя 9 приостанавливается и возобновляется после идентификации всех дефектов на контролируемой окружности. Кроме того, в устройстве 17 осуществляется подсчет числа просканированных окружностей и в соответствии с текущим номером п вырабатывается управляющий сигнал, подаваемый на вход блока 12 и изменяющий скорость вращения объектодержателя 9.
Заявленный способ и устройство для его реализации обеспечивают повышенную достоверность контроля состояния поверхности, например, полупроводниковых пластин; позволяют установить по результатам контроля стратегию последующей технологической обработки: при отсутствии дефектов пластина направляется на следующую операцию, при наличии царапин пластина подвергается повторной шлифовке, при наличии гетерофазных дефектов, пластину подвергают повторной химико-механической очистке и полировке.
Формула изобретения
обработки сигнала информационного цикла, включающего преобразование рассеянного дефектом излучения в электрический сигнал, фиксацию параметров сигнала и определение по параметрам сигнала наличия и характеристики дефекта, отличающийся тем, что, с целью повышения достоверности контроля дефектов, облучают изделие потоком плоскополяризованного излучения с прямоугольной формой сечения пятна, перемещают его по контролируемой поверхности по траектории в виде набора концентрических окружностей, расположенных на равном расстоянии одна от другой, при этом пятно ориентируют длинными сторонами параллельно радиусам окружностей, а минимальное время tn перемещения пятна по n-й окружности выбирают из условия
tn max {т0// 2 ят (R0 - fty/fi dm},
где /г 1 - константа, характеризующая априорно оцененную плотность распределения дефектов по контролируемой поверхности, пропорциональная отношению ожидаемого расстояния между дефектом к среднему ожидаемому размеру дефектов;
т- коэффициент с размерностью времени, одинаковый для всех окружностей, г т0:
т0 - длительность информационного цикла, равная времени срабатывания тракта обработки сигнала;
бт - минимальный размер регистрируемых дефектов;
RO - радиус внешней окружности, по которой пятно перемещают по поверхности;
п - номер окружности;
.1- разность радиусов соседних концентрических окружностей,
10 длина прямоугольного пятна потока излучения на поверхности, причем для установления размера и ориентации дефекта после преобразования потока, рассеянного от этого дефекта излучения в электрический сигнал, измеряют максимальную амплитуду этого сигнала, дифференцируют его, получая набор импульсов, выделяют из них пару разнополярных импульсов, соответствующих соответственно передней и задней границам дефекта, измеряют временной интервал между ними и определяют протяженность дефекта в направлении, совпадающем с направлением перемещения пятна по следующим соотношениям:
(гт - Тп) VCK при Тп Тт
д I тт vCK приТп тт ,
(Тп - Тт) VCK при Тп Тт
где тп - измеренный временный интервал между импульсами, соответствующими одному дефекту;
тт - время, затрачиваемое на перемещение пятна по поверхности изделия на
0 расстояние, равное ширине этого пятна;
VCK - линейная скорость перемещения пятна по поверхности, причем размер дефекта Y в направлении, перпендикулярном указанному, определя5 ют по отношению амплитуды 0п ранее атте- стованного для конкретной группы дефектов уровня к максимальной амплитуде макс регистрируемого недифференцированного сигнала в пределах длительности пере0 мещения пятна по дефекту в соответствии с соотношением
Y
|Д - 1 макс/ 3 Ion при Д 6
при Д д
I I
/1с
макс/ on
где Д - ширина пятна оптического излучения,
дополнительно регистрируют амплитуду отраженного от поверхности изделия излуче- ния, по которому судят о типе дефекта,
же окружности, а регистрацию излучения возобновляют, начиная с момента совмещения прямоугольного пятна с дефектом, от которого зарегистрирован импульс, с появлением которого приостанавливают регистрацию.
и задней границам дефекта, осуществляют путем измерения амплитуд импульсов дифференцированного сигнала, суммирования амплитуд импульсов с положительной полярностью и импульсов с отрицательной полярностью, определения разности сумм этих амплитуд, причем первый импульс с положительной полярностью идентифицируют как импульс, соответствующий передней границе дефекта, а импульс с отрицательной полярностью, амплитуда которого равна разности просуммированных амплитуд импульсов положительной полярности и просуммированных амплитуд импульсов отрицательной полярности, идентифицируют, как импульс, соответствующий задней границе.
tn (5/2 л:гт 1 4 Ксш ТД.д/ЯТ/д &т А
где Ксш - отношение сигнал/шум тракта обработки сигнала, приведенное к входу тракта;
/r.g. - коэффициент диффузного рассеяния оптического излучения бездефектной поверхностью;
rjg - коэффициент рассеяния оптического излучения дефектом.
обработки данных и индикаторный блок, а также механические приводы вращательного и поступательного движений объектодер- жателя, отличающееся тем, что, с
целью повышения достоверности контроля, в устройство введены щелевая диафрагма и поляризатор, расположенные на оси источника оптического излучения, система регистрации и обработки данных включает блок
0 предварительной обработки преобразованного сигнала, вычислительное устройство, блок цифроаналогового преобразования, два блока управления механическими приводами, при этом выход блока предвари5 тельной обработки сигнала соединен с входом вычислительного устройства, вход блока предварительной обработки сигнала через усилитель электрически соединен с выходом основного преобразователя опти0 ческого излучения, вычислительное устройство через блок цифроаналогового преобразования, имеющий выход на индикаторный блок, электрически соединено с выходами блоков управления мехзнически5 ми приводами, выходы которых соединены с входами соответствующих приводов, причем блок предварительной обработки преобразованного сигнала выполнен в виде последовательно соединенных дифферен0 цирующей цепочки, таймера, анализатора импульсов и блока аналого-цифрового преобразования.
0 внешней стороны светоприемного коллектора установлены последовательно поляризованный фильтр и дополнительный преобразователь оптического излучения, выход которого через дополнительный уси5 литель электрически соединен с вторым входом блока предварительной обработки преобразованного сигнала.
+ r,
где Rn - внешний радиус обьектодержателя, г- внешний радиус основного преобразователя оптического излучения, один
JL
f hi J
Фи г. 6

| 0 |
|
SU200955A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР N 1394876, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
