Изобретение относится к автоматическому управлению и может быть использовано в системах автоматического регулирования скорости, в которых в процессе работы необходимо поддерживать минимальный уровень натяжения в транспортируемом материале.
Цель изобретения - повышение точности.
На чертеже представлена структурная схема устройства.
Устройство для регулирования скорости содержит последовательно соединенные датчик 1 скорости, сумматор 2, усилитель 3, блок 4 умножения, интегратор 5, блок 6 умножения, сумматор 7, интегратор 8, усилитель 9, усилитель 10, выход которого соединен с вторым входом блока 4 умножения, причем выход интегратора 5 соединен с вторым входом сумматора 2, выход усилителя 9 соединен с вторым входом блока 6 умножения, блок 11 задания номинальной ЭДС, выход которого соединен с вторым входом сумматора 7, последовательно соединенные датчик 12 тока, сумматоры 13, 14, 15, релейный элемент 16, ключ 17, интегратор 18, регулятор 19 скорости, последовательно соединенные ключ 20, блок 21 памяти, усилитель 22, выход которого соединен с вторым входом сумматора 14, блок 23 задания минимального натяжения, выхйд которого соединен с вторым входом сумматора 15, причем выход сумматора 14 соединен с первым входом ключа 20, выход усилителя 3 соединен с вторым входом сумматора 13, последовательно соединенные датчик 24 скорости, сумматор 25, усилитель 26, блок 27 умножения, интегратор 28, блок 29 умножения, сумматор 30, интегратор 31, усилитель 32, усилитель 33, выход которого соединен с вторым входом блока 27 умножения, причем выход интегратора 28 соединен с вторым входом сумматора 25, выход усилителя 32 соединен с.вторым входом блока 29 умножения, блок 34 задания номинальной ЭДС, соединенный с вторым входом сумматора 30, последовательно соединенные датчик 35 тока, сумматор 36, .пороговый элемент 37, управляемый интегратор 38, пороговый элемент 39, элемент И-НЕ 40, выход которого соединен с вторым входом ключа 17, последовательно соединенные пороговый элемент 41, инвертор 42, выход которого соединен с вторым входом элемента И-НЕ 40. Выход датчика 24 скорости соединен с вторым входом управляемого интегратора 38, выход усилителя 26 соединен с вторым входом сумматора 36, выход управляемого интегратора 38 соединен с входом порогового элемента 41, выход
порогового элемента 37 соединен с вторцм входом ключа 20.I
Устройство работает следующим образом,
Блоки 2, 4, 5, 6, 7, 8, 9, 10, 11 образуют модель электромеханической части привода первого технологического механизма, Например прокатной клети. В контуре из 6ho- ков 2, 3, 4, 5 определяется динамическая
составляющая тока двигателя первой прокатной клети (блок 3). На выходе блока 4 вычисляется динамический момент двигателя за счет перемножения напряжения с йы- хода усилителя 3 и напряжения с выхода
усилителя 10. На выходе интегратора 5 моделируется величина, пропорциональная скорости двигателя, которая подается на сумматор 2 с противоположным знаком ;по отношению к сигналу скорости с датчике 1
скорости, подаваемому также на вход сумматора 2. Усилитель 9, усилитель 10, интегратор 5 имеют постоянную времени, равную электромеханической постоянной времени привода. Интегратор 8 имеет постоянную
времени, равную постоянной времени рб- мотки возбуждения двигателя и ограничение на уровне выходного сигнала. На выходе блока 6 умножения моделируется ЭДС двигателя. Блок 11 задает номинальную ЭДС противоположного знака. На сумматоре 7 сравниваются эти величины. На выходе интегратора 8 моделируется магнитный поток двигателя. При этом в модели учитывается ослабление потока двигатеЬя,
которое характеризует функционирование привода в зоне скоростей выше основной. Аналогично, используя скорость второй прокатной клети с выхода датчика 24 с помощью блоков 25...34, на выходе усилителя
26 восстанавливается динамическая составляющая тока двигателя второй прокатной клети как в зоне основной скорости полном потоке возбуждения двигателя, так и в зоне повышенной скорости привода Нри
ослабленном потоке возбуждения двигателя1.
Ключ 20 замкнут в течение всего времени, пока металл находится только в клети, и блок 21 памяти запоминает до тех
пор, пока напряжение, пропорциональное статической составляющей тока первой кле; ти, поступающее на первый вход сумматс ра 14, не уравняется с напряжением, поступающим с противоположным знаком на в|горой вход сумматора 14. При этом на блфке 21 памяти запоминается напряжение, пропорциональное составляющей тока первой клети, При поступлении металла в валки второй прокатной клети на выходе датчика 35
появляется сигнал. На сумматоре 36 из него вычитается динамическая составляющая. Таким образом, на выходе сумматора 36 вычисляется статическая составляющая тока двигателя второй клети, от которого срабатывает пороговый элемент 37 и размыкает ключ 20, который дзет команду на включение управляемого интегратора 38. После размыкания ключа 20 на сумматоре 14 происходит сравнение текущего значения с величиной, запомненной в блоке 21.
На второй вход интегратора 38 поступает сигнал с датчика 24, пропорциональный скорости двигателя второй клети. Темп нарастания выходного напряжения интегратора 38 зависит от скорости двигателя второй клети. По достижении порогового значения напряжения на выходе интегратора 38 срабатывает пороговый элемент 39. Через элемент И-НЕ 40 на ключ 17 поступает сигнал на его замыкание. По достижении порогового значения напряжения пороговым элементом 41 через инвертор 42 и элемент И-НЕ 40 проходит сигнал на размыкание ключа. Блок 23 задает напряжение на вход сумматора 15, пропорциональное эталонной величине. Таким образом, с помощью ключа 17 сигнал коррекции скорости подается через интегратора 18 на систему регулирования скорости двигателя.
Формула изобретения Устройство для регулирования скорости прокатки, содержащее датчики тока первого и второго двигателей, первый и второй пороговые элементы, первый и второй ключи, релейный элемент, последовательно соединенные первый интегратор и регулятор скорости прокатки, отличающееся тем, что, с целью повышения точности, в него введены последовательно соединенные датчик скорости первого двигателя, первый сумматор, первый усилитель, первый блок умножения, второй интегратор, второй блок умножения, второй сумматор, третий интегратор, второй усилитель и третий усилитель, подключенный выходом к второму входу первого блока умножения, выход второго усилителя соединен с вторым входом второго блока умножения, выход второго интегратора соединен с вторым входом первого сумматора, задатчик номинальной ЭДС первого двигателя, подключенный выходом к второму входу второго сумматора, последовательно соединенные третий, четвертый и пятый сумматоры, выход пятого сумматора соединен с входом релейного элемента, подключенного выходом к сигнальному входу первого ключа, соединенного выходом с входом первого интегратора, выход первого датчика тока
двигателя и выход первого сумматора соединены соответственно с первым и вторым входами третьего сумматора, введены последовательно соединенные блок памяти и четвертый усилитель, подключенный выходом к второму входу четвертого сумматора, задатчик минимального натяжения прокатываемого изделия, соединенный выходом с вторым входом пятого сумматора, первый вход которого соединен с сигнальным входом второго ключа, подключенного выходом к входу блока памяти, последовательно соединенные датчик скорости второго двигателя, шестой сумматор, пятый усилитель, третий блок умножения, четвертый интегратор, четвертый блок умножения, седьмой сумматор, пятый интегратор, шестой усилитель и седьмой усилитель, соединенный выходом с вторым входом третьего блока умножения, выход шестого усилителя соединен с вторым входом четвертого блока умножения, выход четвертого интегратора соединен с вторым входом шестого сумматора, задатчик номинальной ЭДС второго двигателя, подключенный выходом к второму входу седьмого сумматора, последовательно соединенные управляемый интегратор, третий пороговый элемент, инвертор и элемент И-НЕ, соединенный выходом с управляющим входом первого ключа,
а вторым входом - с выходом второго порогового элемента, подключенного входом к выходу управляемого интегратора, выход первого порогового элемента соединен с управляющими входами второго ключа и управляемого интегратора, выход датчика скорости второго двигателя соединен с сигнальным входом управляемого интегратора, а также введен восьмой сумматор,, соединенный выходом с входом первого
порогового элемента, первым входом - с выходом пятого усилителя, а вторым входом - с выходом датчика тока второго двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования межклетевых натяжений | 1984 |
|
SU1174112A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Устройство для управления асинхронным электродвигателем | 1979 |
|
SU864479A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |
| Устройство для измерения межклетевого натяжения проката | 1985 |
|
SU1247114A1 |
| Устройство для регулирования скорости двигателя | 1981 |
|
SU970331A2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |
| Устройство регулирования натяжения в межклетевом промежутке прокатного стана | 1990 |
|
SU1722638A1 |
| Устройство для регулирования скорости | 1982 |
|
SU1035561A1 |
| Устройство для управления вентильным электродвигателем, выполненным на базе синхронной машины | 1987 |
|
SU1636978A1 |
Изобретение относится к регуляторам скорости, в которых в процессе работы необходимо поддерживать минимальный уровень натяжения в транспортируемом материале. Цель изобретения - повышение точности. Для этого в устройстве для регулирования скорости прокатки определяют динамические составляющие тока с помощью блоков 2, 3,4, 5 и 25,26, 27, 28, моделируются величины, пропорциональные скорости двигателя, сравниваются со скоростями датчиков скорости. При этом учитываются электромеханическая постоянная времени привода, постоянная времени обмотки возбуждения, ЭДС двигателя и формируется сигнал коррекции скорости двигателя. 1 ил.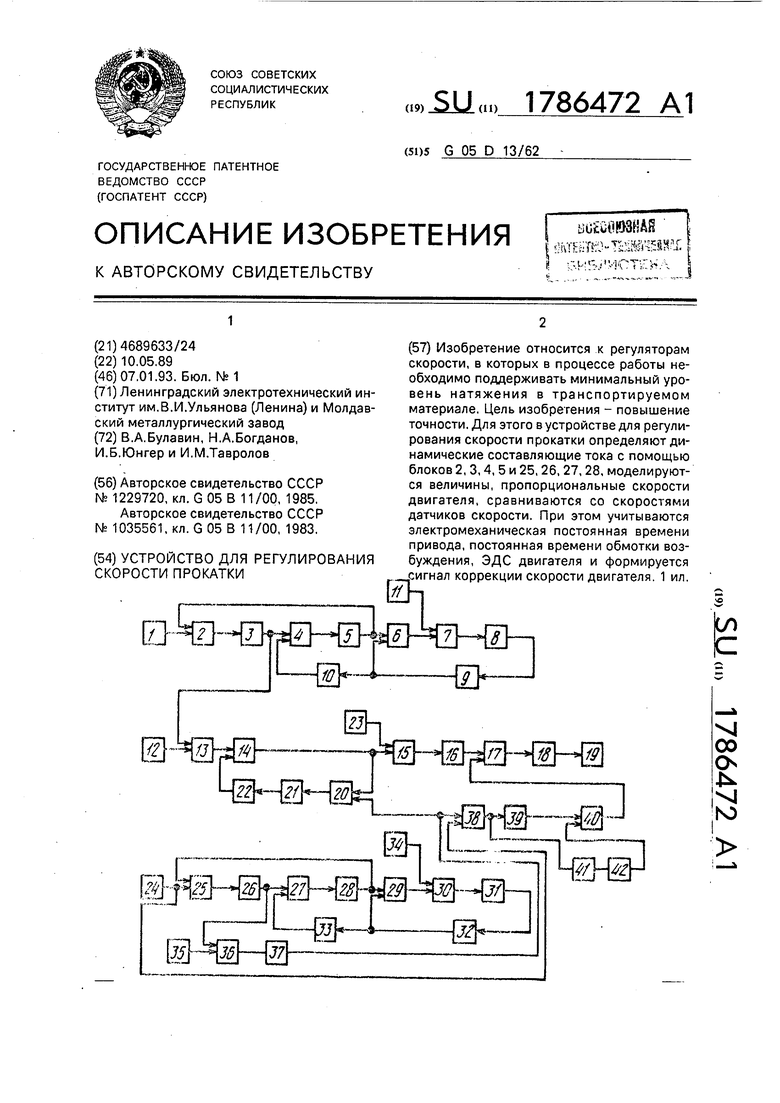
| Устройство для регулирования скорости | 1984 |
|
SU1229720A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для регулирования скорости | 1982 |
|
SU1035561A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
