(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ACHHXPOHffiJM ЭЛЕКТРОДВИГАТЕЛЕМ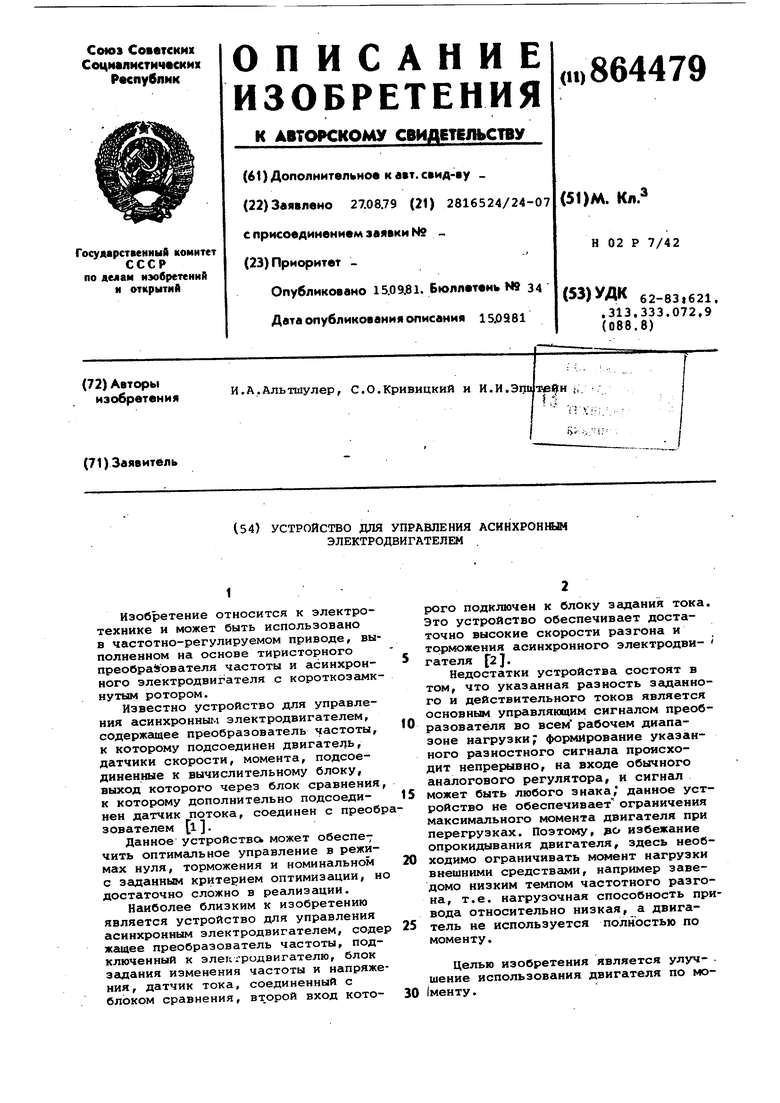
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU904174A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Асинхронный частотно-регулируемыйэлЕКТРОпРиВОд | 1978 |
|
SU811476A1 |
| Устройство для управления асинхронным электродвигателем | 1980 |
|
SU936335A2 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| Электропривод переменного тока | 1979 |
|
SU961087A1 |
| Устройство для частотного управления асинхронным электродвигателем рольганга прокатного стана | 1983 |
|
SU1100701A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
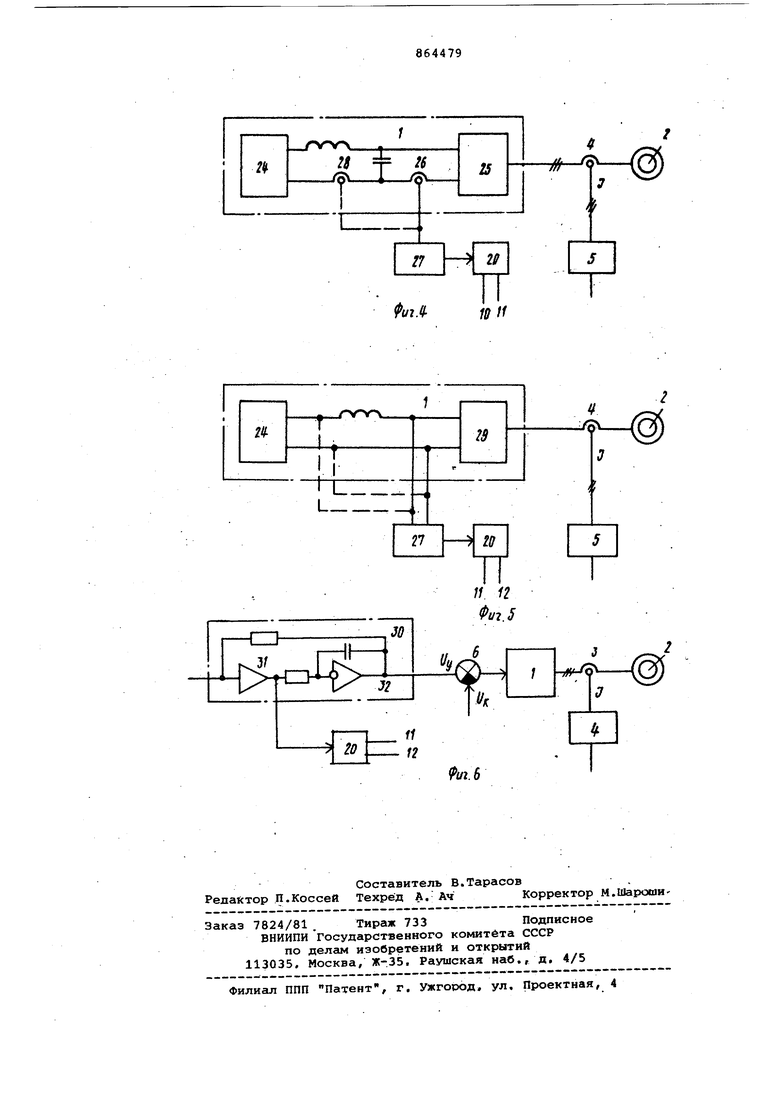
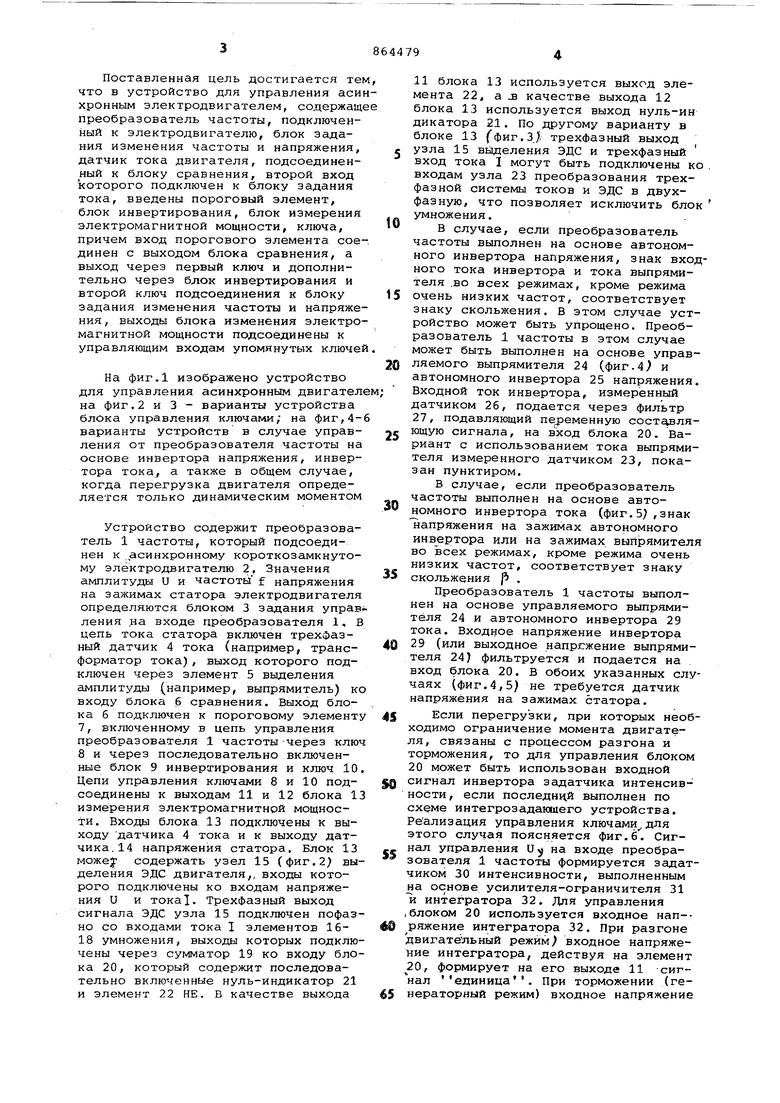
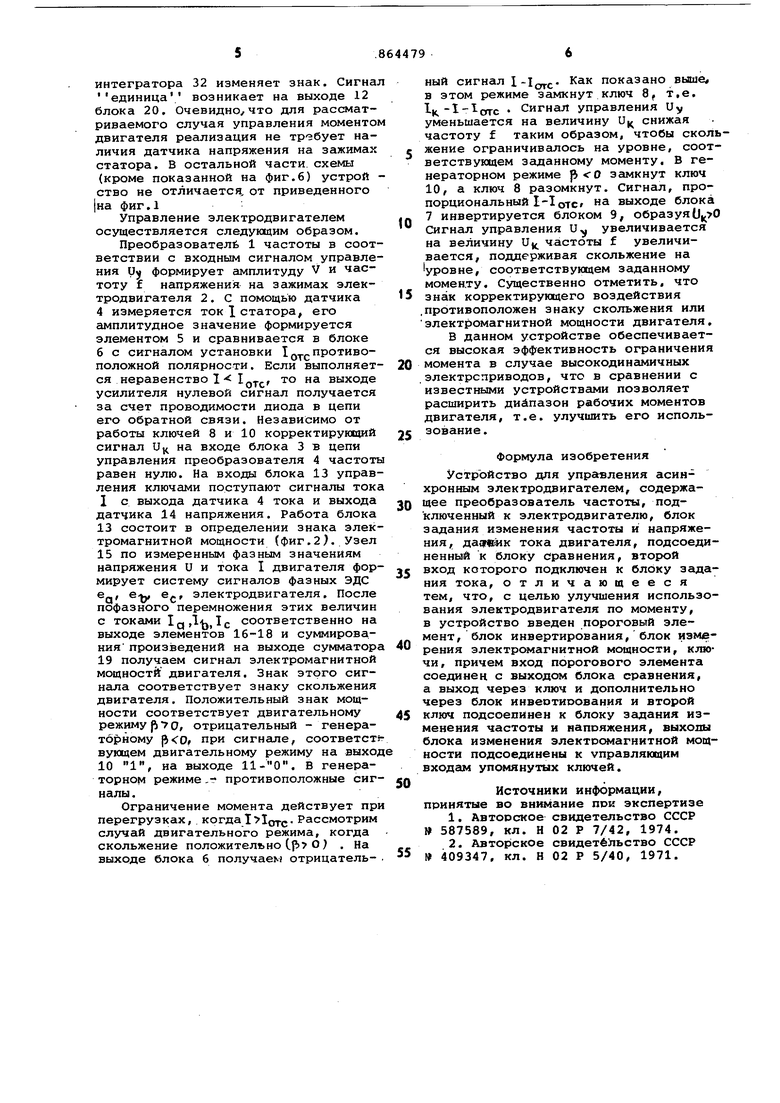
Изобретение относится к электротехнике и может быть использовано в частотно-регулируемом приводе, вы полненном на основе тиристорного преобразователя частоты и асинхронного электродвигателя с короткозамк нутым ротором. Известно устройство для управления асинхронны. электродвигателем, содержащее преобразователь частоты, к которому подсоединен двигатель, датчики скорости, момента, подсоединенные к вычислительному блоку, выход которого через блок сравнения к которому дополнительно подсоединен датчик потока, соединен с преоб зователем l. Данное устройство может обеспе7 чить оптимальное управление в режимах нуля, торможения и номинальном с заданным критерием оптимизации, н достаточно сложно в реализации. Наиболее близким к изобретению является устройство для управления асинхронным электродвигателем, соде жгицее преобразователь частоты, подключенный к электродвигателю, блок задания изменения частоты и напряже ния, датчик тока, соединенный с блоком сравнения, вт.орой вход которого подключен к блоку задания тока. Это устройство обеспечивает достаточно высокие скорости разгона и торможения асинхронного электродвигателя 2 . Недостатки устройства состоят в том, что указанная разность заданного и действительного токов является основным управляющим сигналом преобразователя во всем рабочем диапазоне нагрузки; формирование указанного разностного сигнала происходит непрерывно, на входе обычного аналогового регулятора, и сигнал может быть любого знака, данное устройство не обеспечивает ограничения максимального момента двигателя при перегрузках. Поэтому, эо избежание опрокидывания двигателя, здесь необходимо ограничивать момент нагрузки внешними средствами, например заведомо низким темпом частотного разгона, т.е. нагрузочная способность привода относительно низкая, а двигатель не используется полностью по моменту. Целью изобретения является улучшение использования двигателя по моменту. Поставленная цель достигается тем что в устройство для управления асин хронным электродвигателем, содержаще преобразователь частоты, подключенный к электродвигателю, блок задания изменения частоты и напряжения, датчик тока двигателя, подсоединенный к блоку сравнения, второй вход которого подключен к блоку задания тока, введены пороговый элемент, блок инвертирования, блок измерения электромагнитной мощности, ключа, причем вход порогового элемента соединен с выходом блока сравнения, а выход через первый ключ и дополнительно через блок инвертирования и второй ключ подсоединения к блоку задания изменения частоты и напряже ния , выходы блока изменения электро магнитной мощности подсоединены к управляющим входам упомянутых ключе На фиг.1 изображено устройство для управления асинхронным двигател на фиг,2 и 3 - варианты устройства блока управления ключами; на фиг,4варианты устройств в случае управЛенин от преобразователя частоты на основе инвертора напряжения, инвертора тока, а также в общем случае, когда перегрузка двигателя определяется только динамическим моментом Устройство содержит преобразователь 1 частоты, который подсоединен к асинхронному короткозамкнутому электродвигателю 2, Значения амплитуды и и частоты f напряжения на зажимах статора электродвигателя определяются блоком 3 задания управ ления на входе преобразователя 1, В цепь тока статора включен трехфазный датчик 4 тока (например, трансформатор тока), выход которого подключен через элемент 5 выделения амплитуды (например, выпрямитель) к входу блока 6 сравнения. Выход блока 6 подключен к пороговому элемент 7, включенному в цепь управления преобразователя 1 частоты через клю 8 и через последовательно включенные блок 9 инвертирования и ключ 10 Цепи управления ключами 8 и 10 подсоединены к выходам 11 и 12 блока 1 измерения электромагнитной мощности. Входы блока 13 подключены к выходу датчика 4 тока и к выходу датчика. 14 напряжения статора. Блок 13 можеу содержать узел 15 (фиг.2) вы деления ЭДС двигателя,, входы которого подключены ко входам напряжения и и тока1. Трехфазный выход сигнала ЭДС узла 15 подключен пофаз но со входами тока I элементов 1618 умножения, выходы которых подклю чены через сумматор 19 ко входу бло ка 20, который содержит последовательно включенные нуль-индикатор 21 и элемент 22 НЕ. В качестве выхода 11 блока 13 используется выход элемента 22, а JB качестве выхода 12 блока 13 используется выход нуль-ин дикатора 21. По другому варианту в блоке 13 (фиг,3}. трехфазный выход узла 15 вьщеления ЭДС и трехфазный вход тока I могут быть подключены ко . входам узла 23 преобразования трехфазной системы токов и ЭДС в двухфазную, что позволяет исключить блок умножения. В случае, если преобразователь частоты вьтолнен на основе автономного инвертора напряжения, знак входного тока инвертора и тока выпрямителя .во всех режимах, кроме режима очень низких частот, соответствует Знаку скольжения. В этом случае устройство может быть упрощено. Преобразователь 1 частоты в этом случае может быть выполнен на основе управляемого выпрямителя 24 (фиг.4) и автономного инвертора 25 напряжения. Входной ток инвертора, измеренный датчиком 26, подается через фильтр 27, подавляющий переменную состадляющую сигнала, на вход блока 20. Вариант с использованием тока выпрямителя измеренного датчиком 23, показан пунктиром. В случае, если преобразователь частоты выполнен на основе автономного инвертора тока (фиг.5),знак напряжения на зажимах автономного инвертора или на зажимах выпрямителя во всех режимах, кроме режима очень низких частот, соответствует знаку скольжения р . Преобразователь 1 частоты выполнен на основе управляемого выпрямителя 24 и автономного инвертора 29 тока. Входное напряжение инвертора 29 (или выходное напряжение выпрямителя 24) фильтруется и подается на вход блока 20. В обоих указанных случаях (фиг.4,5) не требуется датчик напряжения на зажимах статора. Если перегрузки, при которых необходимо ограничение момента двигателя, связаны с процессом разгона и торможения, то для управления блоком 20 может быть использован входной сигнал инвертора задатчика интенсивности, если последний выполнен по схеме интегрозадающего устройства. Реализация управления ключами для этого случая поясняется фиг.б. Сигнал управления Uy на входе преобразователя 1 частоты формируется задатчиком 30 интенсивности, выполненным на основе усилителя-ограничителя 31 к интегратора 32. Для управления .блоком 20 используется входное нап-ряжение интегратора 32. При разгоне двигате пьный режим входное напряжение интегратора, действуя на элемент 20, формирует на его выходе 11 сигнал единица . При торможении (генераторный режим) входное напряжение интегратора 32 изменяет знак. Сигна единица возникает на выходе 12 блока 20, Очевидно, что для рассматриваемого случая управления моменто двигателя реализация не тр-эбует наличия датчика напряжения на зажимах статора, В остальной части схемы (кроме показанной на фиг.6) устрой ство не отличается, от приведенного |на фиг.1 Управление электродвигателем осуществляется следующим образом. Преобразователи 1 частоты в соответствии с входным сигналом управления у формирует амплитуду V и частоту f напряжени;я на зажимах электродвигателя 2. С помощью датчика 4 измеряется ток 1 статора его амплитудное значение формируется элементом 5 и сравнивается в блоке б с сигналом установки I Q, противоположной полярности. Если выполняется неравенство I Ig, то на выходе усилителя нулевой сигнал получается за счет проводимости диода в цепи его обратной связи. Независимо от работы ключей 8 и 10 корректирующий сигнал и на входе блока 3 в цепи управления преобразователя 4 частоты равен нулю. На входы блока 13 управления ключами поступают сигналы тока I с выхода датчика 4 тока и выхода датчика 14 напряжения. Работа блока 13 состоит в определении знака электромагнитной мощности (фиг.2). Узел 15 по измеренным фазным значениям напряжения U и тока I двигателя формирует систему сигналов фазных ЭДС е, e-jy е, электродвигателя. После пофазного перемножения этих величин с токами 1дД, TC соответственно на выходе элементов 16-18 и суммирования произведений на выходе сумматора 19 получаем сигнал электромагнитной мощности двигателя. Знак этого сигнала соответствует знаку скольжения двигателя. Положительный знак мощности соответствует двигательному режиму р О/ отрицательный - генераторному ( при сигнале, соответстт вующем двигательному режиму на выход 10 1, на выходе , В генераторном режиме.- противоположные сигналы. Ограничение момента действует при перегрузках, когда (угс. Рассмотрим случай двигательного режима, когда скольжение положительно Ср О} . На выходе блока 6 получаем отрицательный сигнал .. Как показано выше, в этом режиме замкнут ключ 8, т,е, I -I-IOT-C . Сигнал управления Uy уменьшается на величину U снижая частоту f таким образом, чтобы скольжение ограничивалось на уровне, соответствующем заданному моменту. В генераторном режиме замкнут ключ 10, а ключ 8 разомкнут. Сигнал, пропорциональный 1-1отс на выходе блока 7 инвертируется блоком 9, образуя Сигнал управления U увеличивается на величину U частоты f увеличивается, поддерживая скольжение на уровне, соответствующем заданному моменту. Существенно отметить, что знак корректирующего воздействия .противоположен знаку скольжения или электромагнитной мощности двигателя, В данном устройстве обеспечивается высокая эффективность ограничения момента в случае высокодинс1мичных электроприводов, что в сравнении с известными устройствами позволяет расширить диапазон рабочих моментов двигателя, т.е. улучшить его использование. Формула изобретения Устройство для управления асинхронным электродвигателем, содержащее преобразователь частоты, подключенный к электродвигателю, блок задания изменения частоты и напряжения, дадг№йк тока двигателя, подсоединенный к блоку сравнения, второй вход которого подключен к блоку задания тока, отличающееся тем, что, с целью улучшения использования электродвигателя по моменту, в устройство введен пороговый элемент, блок инвертирования, блок измерения электрсмагнитной мощности, ключи, причем вход порогового элемента соединен с выходом блока сравнения, а выход через ключ и дополнительно через блок инвеотиоования и второй ключ подсоединен к блоку задания изменения частоты и напояжения, выходы блока изменения электосмагнитной мощности подсоединены к управляющим входам упомянутых ключей. Источники информации, принятые во внимание пои экспертизе 1,Авторское свидетельство СССР 587589, кл. Н 02 Р 7/42, 1974. 2.Авторское свидет6 1ьство СССР 409347, кл. Н 02 Р 5/40, 1971.
/RV.
Iff
fO
, I
if /г
CZF
.lffff/f
