ч со о
4 О
ел
Изобретение оросится к электронной и вычислительной технике, в частности к устройствам ввода графической информации.
Известны графические манипуляторы, содержащие основание в виде платформы, две взаимно перпендикулярные оси с расположенными на них координатными преобразователями и шар, нагруженный на эти оси. Часть шара выступает сквозь отверстие И поворачивается вручную оператором.
При работе с приведенными манипуляторами оператор вращает шар, приводя в движение оси, на которых находятся модулирующие диски, которые, в свою очередь, являются частью координатных преобразователей. Оператор вращает шар, производя радиальные движения, причем положение пальцев оператора неустойчиво и ему приходится интуитивно упреждать ошибку позиционирования маркера. При этом с пальцев рук оператора переносится грязь на шар, затем и на оси преобразователей.. Грязь и жировые отложения способствуют проскальзыванию перехода шар-оси преобразователей, что в свою очередь снижает надежность работы манипуляторов.
Наиболее близким к изобретению по технической сущности является манипулятор типа Мышь для персональных компьютеров,:.
Недостатком прототипа является сложная конструкция и низкая надежность, обусловленная проскальзыванием осей преобразователей, которое вызвано попаданием грязи и жировых отложений с пальцев рук оператора на упомянутые оси через шар. Кроме того, трудно осуществлять большие и быстрые изменения позиций, оператор управляет маркером, производя радиальные движения, удобнее же производить движения по прямой или произвольно.
Цель изобретения - упрощение конст- рукции манипулятора.
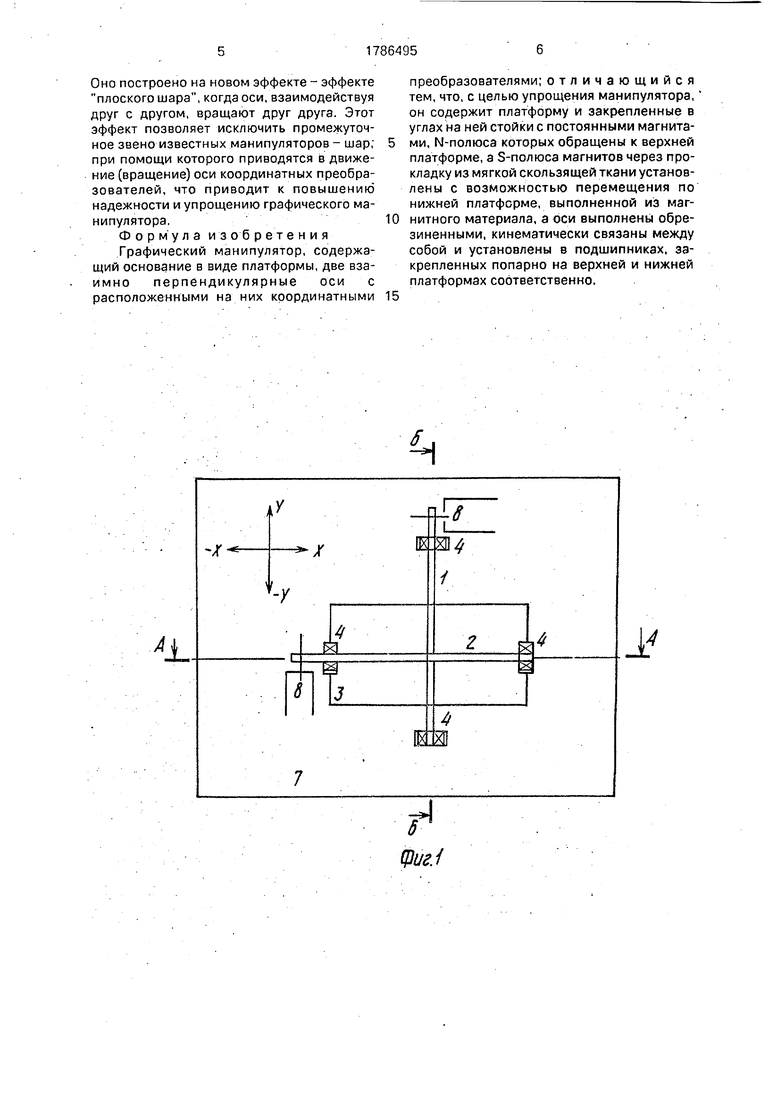
. Указанная цель достигается тем, что в графический манипулятор, содержащий основание в виде.платформы, две взаимно перпендикулярные оси с расположенными на них координатными преобразователями, введена верхняя платформа и закрепленные на ней в углах стойки с постоянными магнитами, N-полюса которых обращены к верхней платформе, а S-полюса магнитов через прокладку из мягкой ткани установлены с возможностью перемещения по нижней, платформе, выполненной из магнитопроводящего материала, а оси выполнены обрезиненными, кинематически связаны между собой и установлены в подшипниках, закрепленных попарно на верхней и нижней платформах соответственно. На фиг.1 представлена схема графического манипулятора, вид сверху, (верхняя
платформа условно показана прозрачной); на фиг.2 и 3 - разрезы А-А и Б-Б на фиг.1. Графический манипулятор содержит об- резиненнуюось 1, обрезиненнуюосьЗ, верхнюю платформу 3, подшипники 4,
постоянные магниты 5, прокладки 6 из мягкой скользящей ткани, нижнюю платформу 7 и координатные преобразователи 8.
Манипулятор собран так, что верхняя
платформа 3 ложится на нижнюю платформу 7 и притягивается к нижней за счет магнита 5, укрепленного на верхней платформе 3, и магнитопроводящего слоя нижней платформы 7. Обрезиненные оси 1 и 2 надежно контактируют между собой за счет тех же
магнитных сил притяжения, Конструкция манипулятора представляет собой сэндвич с катающимися друг по другу осями 1 и 2. Фиксированное сцепление 5 и устойчивость обеспечивается магнитами 5.
Манипулятор, работает следующим образом.
В исходном состоянии платформы 3 и 7
установлены симметрично и неподвижны
(платформа 7 всегда неподвижна). При перемещении платформы 3 в произвольных направлениях ( ±Х) вращается только ось 1 и модулирующий диск координатного преобразователя 8 оси 1.
При перемещении платформы 3 в направлении ( ±Y) ось 2 прокатывается по оси 1 и вращается модулирующий диск координатного преобразователя 8 оси 2. При перемещении платформы 3 в произвольных направлениях (+Y, -X), (-Y, +Х), (+Х, +Х) по
окружности вращаются обе оси 1 и 2 и на выходе координатных преобразователей 8 обеих осей 1 и 2 будут отрабатываться импульсы с частотой, пропорциональной углу и скорости перемещения верхней платформы 3... ..: ....
Габариты опытного образца манипулятора 40x140x12 мм; длина рабочих осей 65 мм; рабочая область манипулирования 60x60 мм; диаметр осей 3 мм, диаметр мо. дулирующего диска 20 мм; количество просветленных полос на модулирующем диске 80, количество дискрет граничных зон 480x480.
Данный манипулятор позволяет осуществлять большие и быстрые перемещения позиции маркера, плавность перемещения простоту конструкции.
Изобретение объединяет в себе и выполняет роль планшета, шара и мыши.
Оно построено на новом эффекте - эффекте плоского шара, когда оси, взаимодействуя друг с другом, вращают друг друга. Этот эффект позволяет исключить промежуточное звено известных манипуляторов - шар; при помощи которого приводятся в движение (вращение) оси координатных преобразователей, что приводит к повышению надежности и упрощению графического манипулятора,
Фор мула из об р е т е н и я Графический манипулятор, содержащий основание в виде платформы, две взаимно перпендикулярные оси с расположенными на них координатными
0
5
преобразователями; отличающийся тем, что, с целью упрощения манипулятора, он содержит платформу и закрепленные в углах на ней стойки с постоянными магнитами, N-полюса которых обращены к верхней платформе, а S-полюса магнитов через прокладку из мягкой скользящей ткани установлены с возможностью перемещения по нижней платформе, выполненной из магнитного материала, а оси выполнены обре- зиненными, кинематически связаны между собой и установлены в подшипниках, закрепленных попарно на верхней и нижней платформах соответственно.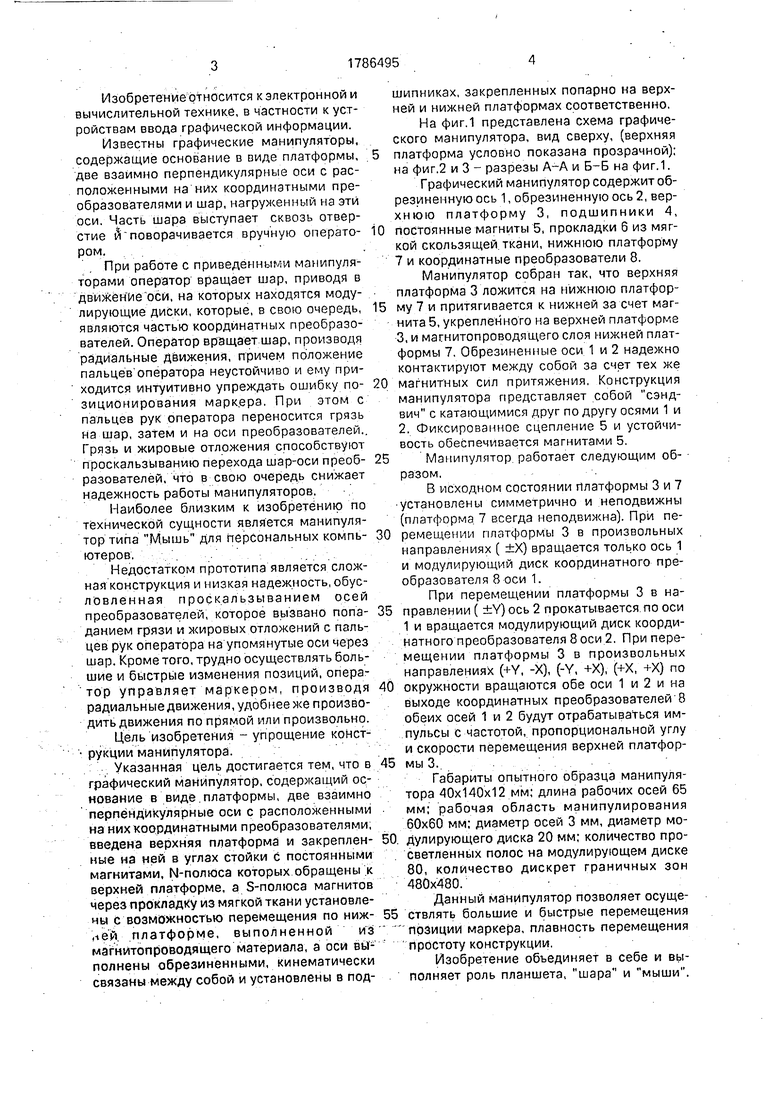
| название | год | авторы | номер документа |
|---|---|---|---|
| "Манипулятор графической информации типа "Мышь" | 1989 |
|
SU1737473A1 |
| ШАРОВОЙ МАНИПУЛЯТОР | 2004 |
|
RU2257607C1 |
| МАНИПУЛЯТОР ШАРОВОЙ | 2010 |
|
RU2446440C1 |
| ШАРОВОЙ МАНИПУЛЯТОР | 2003 |
|
RU2248604C1 |
| КОМБИНИРОВАННЫЙ СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП - РАСТРОВЫЙ ЭЛЕКТРОННЫЙ МИКРОСКОП | 1994 |
|
RU2089968C1 |
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ЭЛЕКТРОННЫЕ ПРИБОРЫ | 2006 |
|
RU2316806C1 |
| БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2533886C1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 1999 |
|
RU2168201C1 |
| ШАРОВОЙ МАНИПУЛЯТОР | 2014 |
|
RU2563610C1 |
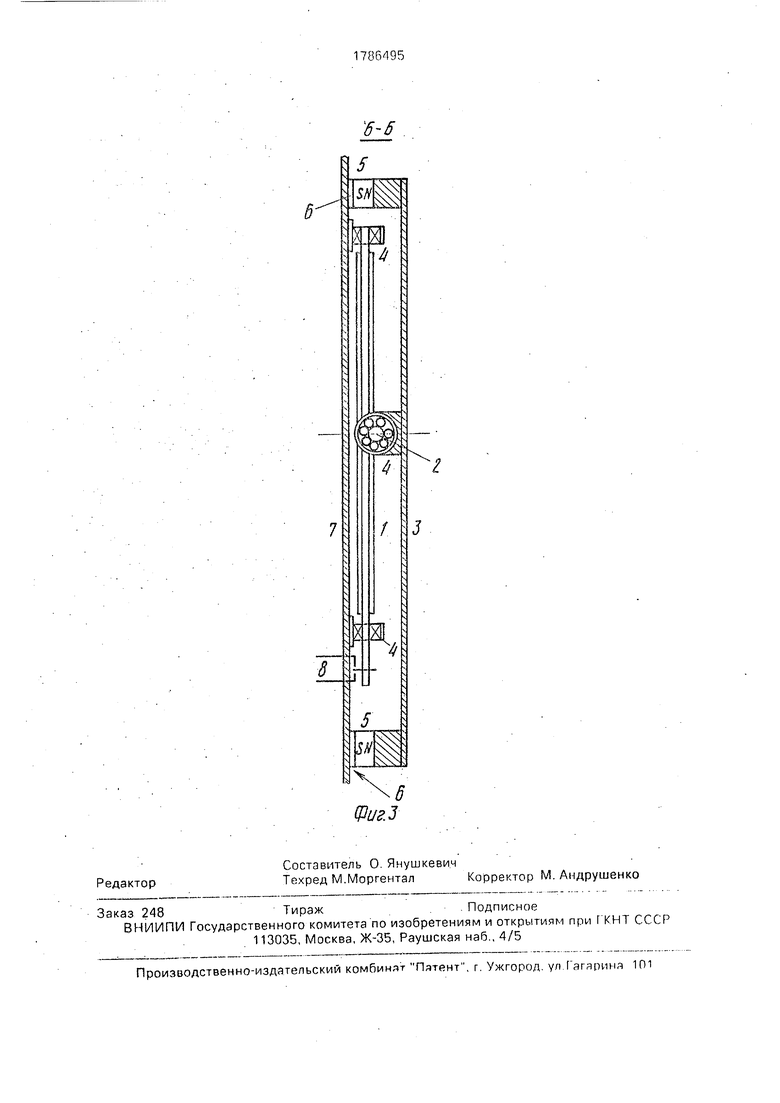
Изобретение относится к электронной и. вычислительной технике, в частности к устройствам ввода графической информации. Целью изобретения является упрощение манипулятора. В графический манипулятор, содержащий основание в виде платформы 7, две взаимно перпендикулярные оси 1 и 2 с расположенными на них координатными . . /V /1 преобразователями 8, введена верхняя платформа 3 и закрепленные в углах на ней стойки с постоянными магнитами5, М-полю- са которых обращены к верхней платформе 3. а S-полюса магнитов 5 через прокладку 6 из мягкой скользящей ткани установлены с возможностью перемещения по нижней платформе 7, выполненной из магнитопро- водящего материала. Оси 1 и 2 выполнены обрезиненными, кинематически связаны между собой и установлены в подшипниках 4. закрепленных попарно на верхней 3 и нижней 7 платформах соответственно. Манипулятор построен на новом эффекте - эффекте плоского шара, когда оси, взаимодействуя друг с другом, вращают друг друга, что позволяет исключить проме-. жуточное звено известных манипуляторов - шар. 3 ил. (Л
-/
тЗ«4±
4
Ј
| Заявка ФРГ № 3425932 | |||
| кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Воробьев Н.В | |||
| и Безобразов B.C | |||
| Графический манипулятор Мышь для персональных ЭВМ | |||
| - Микропроцессорные средства и системы | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
