Изобретение касается автоматического контроля и относится к способам контроля и диагностики электрических и электронных устройств, представленных в виде линейных пассивных цепей с доступом ко всем узлам. .
Известен способ, в котором параметры системы контролируются путем сравнения эталонных (номинальных) значений параметров со значениями параметров математической модели, определяемых путем их настройки из условия минимума меры близости выходных сигналов модели и диагностируемой системы. В применении к линейным пассивным электрическим цепям этот способ заключается в измерении сопротивления между двумя узлами цепи, настройке параметров математической модели для достижения минимума меры близости между сопротивлением, измеренным между двумя узлами контролируемой цепи и рассчитанным по параметрам математической модели. Недостатком этого способа явля ется, во-первых, необходимость знания точной математической модели, а во-вторых, то, что процесс настройки параметров математической модели носит итерационный характер, что связано со значительными затратами времени.
Наиболее близким по технической сущности к изобретению является способ диагностирования подсистем в непрерывных системах, который в применении к линейной пассивно.й цепи заключается в сравнении ее характеристик с характеристиками заведомо исправной идентичной эталонной линейной пассивной цепи, поочередном удалении элементов эталонной цепи, соответствующих предполагаемым неисправностям, для каждой из которых измеряют значения сопротивлений.
В качестве обучающих характеристик в линейной пассивной цепи используют значения сопротивлений между различными парами узлов, которые измеряют для контролируемой и эталонной цепей. При этом выдвигают гипотезы о неисправности группы элементов, которые в эталонной цепи заменяют элементами с перестраиваемыми параметрами, настраиваемыми из условия минимума разности измеряемых сопротивлений. В качестве проверяющей характеристики используют сопротивление, измеряемое между парами узлов в контро- лируемой и эталонной цепях и не вошедшее
в совокупность обучающих характеристик. В случае близости проверяющих характеристик принимают выдвинутую гипотезу.
Недостатком этого известного способа прототипа является то, что настройка пере- страиваемых параметров эталонной цепи является итерационным процессом, т.е. производится многократно повторяющаяся операция поочередной подстройкой перестраиваемых параметров, что ведет к значи- тельным временным затратам, а преждевременное прекращение процесса настройки параметров снижает точность диагноза.
Целью изобретения является повыше- ние точности и быстродействия процесса контроля. .. «Поставленная цель достигается тем, что в способе диагностирования линейной пассивной цепи, основанном на сравнении со- противлении между узлами проверяемой цепи со значениями аналогичных сопротивлений эталонной линейной пассивной цепи путем поочередного удаления элементов .эталонной цепи, соответствующих пр.едпо- .латаемым неисправностям, для каждой из которых измеряют значения сопротивлений, параллельно ветвям проверяемой цепи подключают поочередно проводимость с известными параметрами, измеряют значе- ния сопротивлений между концами каждой ветви, причем количество вариантов под- клю чения равно кратности неисправности проверяемой цепи, а сопротивления эталонной линейной пассивной цепи, соответ- ствующие предполагаемой неисправности, заменяют на переменные, рассчитывают и устанавливают их значения, обеспечивающие равенство сопротивлений, измеренных между концами ветвей проверяемой и эта- лонной линейных пассивных цепей по формуле: л.
л Y.Y + ,.
где-Y - вектор значений перестраиваемых параметров, Y - вектор значений парамет- ров эталонной цепи, которые подлежат настройке, Z - матрица размерности Ixl, I - кратность неисправности, Zik элемент матрицы Z, представляющий собой сопротивление, измеренное на концах k-й ветви проверяемой цепи при i-м варианте подключения проводимостей, параметры которых известны, параллельно ветвям проверяемой цепи, А - вектор-столбец длины I,
: Р
- 2lm (ут + y°im). 1т 1
ai - элемент вектора А, п - число узлов проверяемой и эталонной цепей, р - число
ветвей проверяемой и эталонной цепей, ут
- значение проводимости m-й ветви эталонной цепи, y°im - значение проводимости, параметры которой известен, подключаемой параллельно m-й ветви при I-м варианте подключения проводимостей с известными параметрами параллельно ветвям проверяемой цепи.
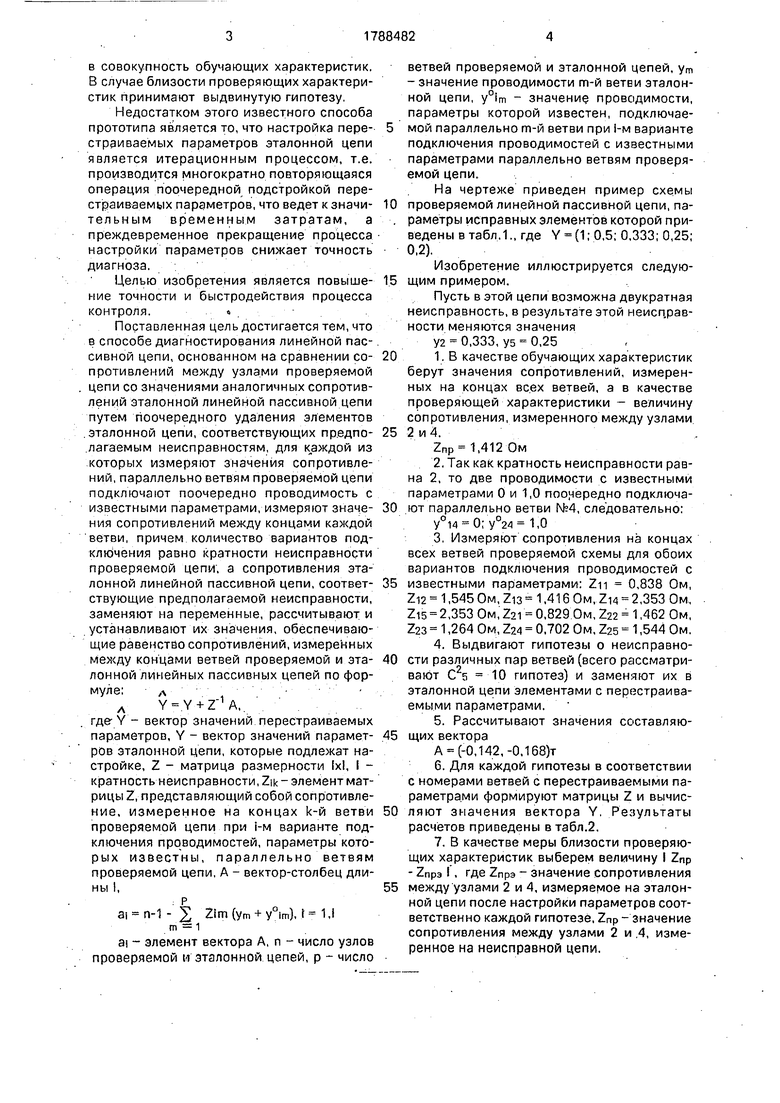
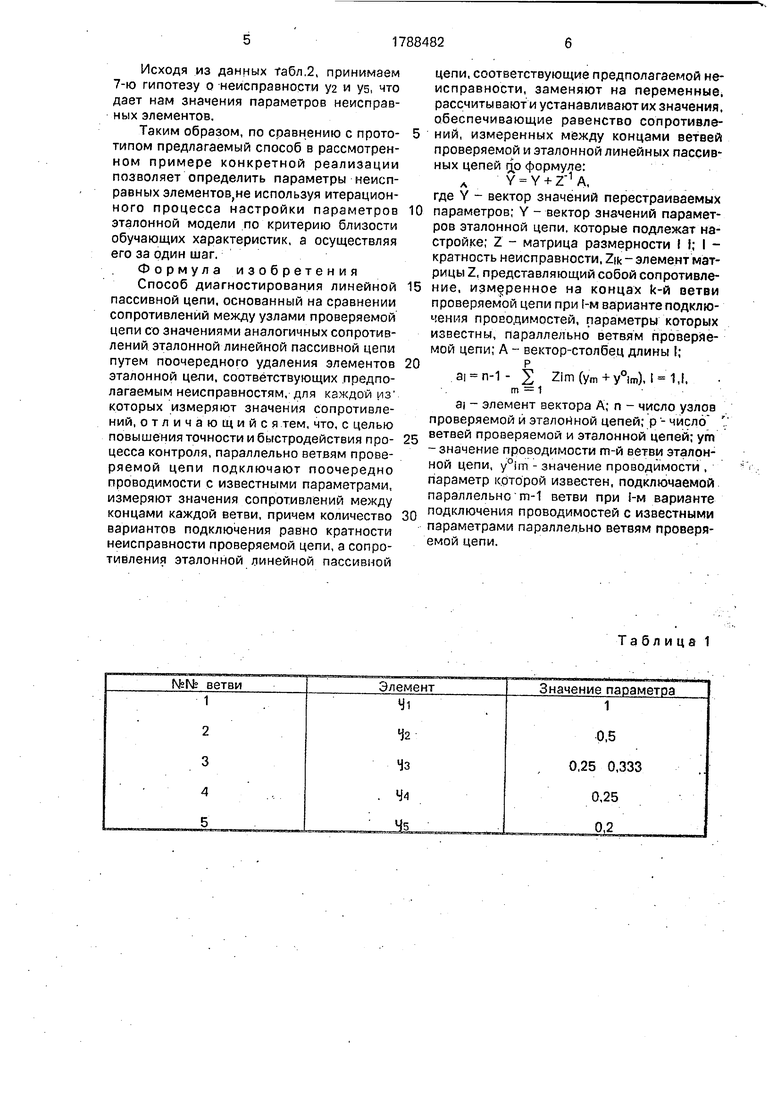
На чертеже приведен пример схемы проверяемой линейной пассивной цепи, параметры исправных элементов которой приведены в табл.1., где Y (1; 0,5; 0,333; 0,25; 0,2).
Изобретение иллюстрируется следующим примером.
Пусть в этой цепи возможна двукратная неисправность, в результате этой неисправности меняются значения
У2 0,333, у5 - 0,25
1. В качестве обучающих характеристик берут значения сопротивлений, измеренных на концах всех ветвей, а в качестве проверяющей характеристики - величину сопротивления, измеренного между узлами 2 и 4.
Znp 1,412 Ом
2.Так как кратность неисправности равна 2, то две проводимости с известными параметрами 0 и 1,0 поочередно подключают параллельно ветви №4, следовательно:
У014 0;у°24 1,0
3. Измеряют сопротивления на концах всех ветвей проверяемой схемы для обоих вариантов подключения проводимостей с известными параметрами: Zn 0,838 Ом, Zi2 1,545Ом, Zi3 1,416 Ом, Zi4 2,353 Ом, Zis 2,353 Ом, Z21 0,829 Ом, Z22 1,462 Ом, Z23 1,264 Ом, Z24 0,702 Ом, Z25 1,544 Ом,
4. Выдвигают гипотезы о неисправности различных пар ветвей (всего рассматривают С25 10 гипотез) и заменяют их в эталонной цепи элементами с перестраиваемыми параметрами.
5. Рассчитывают значения составляющих вектора
А (-0,142, -0.168)т
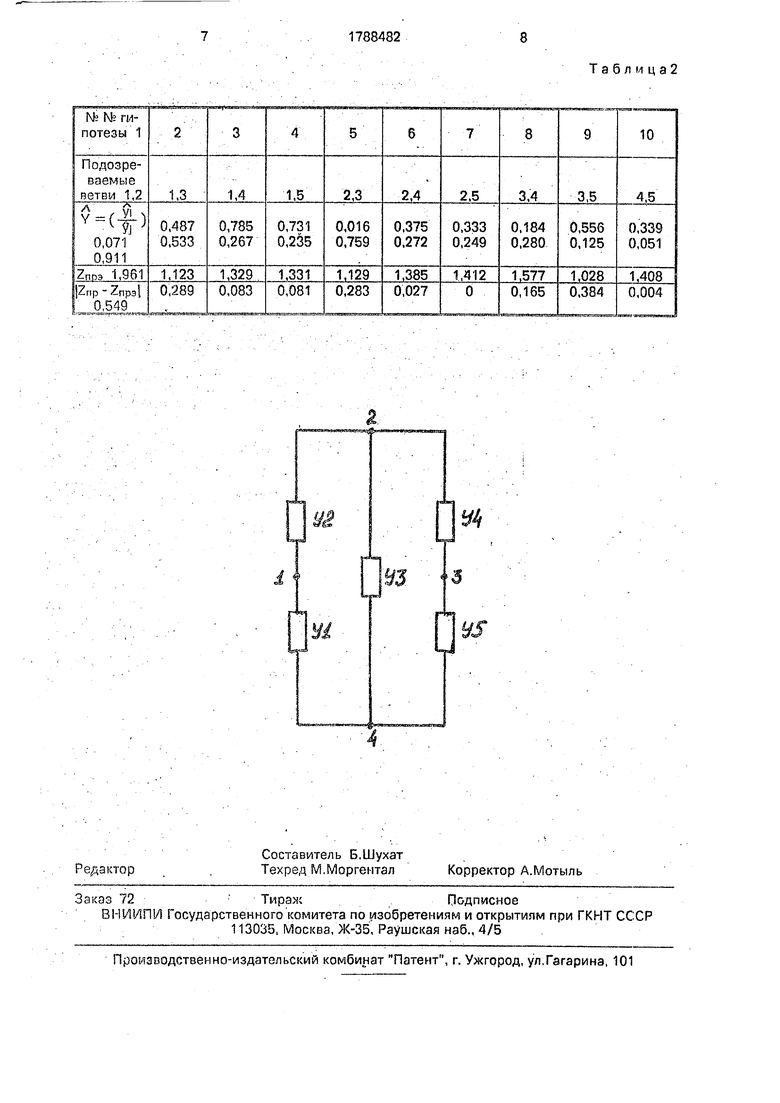
6. Для каждой гипотезы в соответствии с номерами ветвей с перестраиваемыми параметрами формируют матрицы Z и вычисляют значения вектора Y, Результаты расчётов приведены в табл.2.
7. В качестве меры близости проверяющих характеристик выберем величину I Znp
- Znps Г, где Znps - значение сопротивления между узлами 2 и 4, измеряемое на эталонной цепи после настройки параметров соответственно каждой гипотезе, Znp - значение сопротивления между узлами 2 и .4, измеренное на неисправной цепи.
Исходя из данных габл.2, принимаем 7-ю гипотезу о неисправности уз и уз, что дает нам значения параметров неисправных элементов.
Таким образом, по сравнению с прото- типом предлагаемый способ в рассмотренном примере конкретной реализации позволяет определить параметры неисправных элементов не используя итерационного процесса настройки параметров эталонной модели по критерию близости обучающих характеристик, а осуществляя его за один шаг.
Формула изобретения
Способ диагностирования линейной пассивной цепи, основанный на сравнении сопротивлений между узлами проверяемой цепи со значениями аналогичных сопротивлений эталонной линейной пассивной цеш1 путем поочередного удаления элементов эталонной цели, соответствующих .предполагаемым неисправностям, для каждой из которых измеряют значения сопротивлений, отличающийся тем, что, с целью повышения точности и быстродействия про- цесса контроля, параллельно ветвям проверяемой цепи подключают поочередно проводимости с известными параметрами, измеряют значения сопротивлений между концами каждой ветви, причем количество вариантов подключения равно кратности неисправности проверяемой цепи, а сопротивления эталонной линейной пассивной
цепи, соответствующие предполагаемой неисправности, заменяют на переменные, рассчитывают и устанавливают их значения, обеспечивающие равенство сопротивлений, измеренных между концами ветвей проверяемой и эталонной линейных пассивных цепей rjp формуле: АY Y + Г1 А,
где Y - вектор значений перестраиваемых параметров; Y - вектор значений параметров эталонной цепи, которые подлежат настройке; Z - матрица размерности И; I - кратность неисправности, Zik-элемент матрицы Z, представляющий собой солротивле- ние, измеренное на концах k-й ветви проверяемой цепи при l-м варианте подключения пройодимостей, параметры которых известны, параллельно ветвям проверяемой цепи; А - вектор-столбец длины I;
ai n-1- 2 Zim(ym+y°im), 1 1,1.
m 1
ai - элемент аектора А; п - число узлов проверяемой и эталонной цепей; р - число ветвей проверяемой и эталонной цепей; упл - значение проводимости m-й ветви эталонной цепи, y°im - значение проводимости , параметр которой известен, подключаемой параллельно т-1 ветви при 1-м варианте подключения проводимостей с известными параметрами параллельно ветвям проверяемой цепи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностирования электрических цепей постоянного тока | 1990 |
|
SU1795387A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЦЕПЕЙ ИЗМЕРЕНИЯ ТЕМПЕРАТУР | 1999 |
|
RU2196307C2 |
| Способ измерения параметров многоэлементных двухполюсников | 1976 |
|
SU636546A1 |
| Способ определения параметров электрических многополюсников | 1990 |
|
SU1742754A1 |
| Способ интеллектуального управления нагрузкой в изолированных энергосистемах в аварийных режимах и устройство для его осуществления | 2022 |
|
RU2812195C1 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ С ФАЗНЫМ РОТОРОМ | 2008 |
|
RU2392632C1 |
| Способ определения места и характера дефекта в электронных узлах | 2023 |
|
RU2807986C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЛАЖНОСТИ ПО ВОЛЬТ-АМПЕРНОЙ ХАРАКТЕРИСТИКЕ МАТЕРИАЛОВ | 2008 |
|
RU2374633C1 |
| Способ оценивания режимных параметров энергосистемы с использованием уравнений балансов мощности или энергии | 2019 |
|
RU2734319C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
При диагностировании линейной пассивной цепи, основан не сравнении сопротивлений между узлами проверяемой цепи со значениями аналогичных сопротивлений эталонной цепи путем измерения значения сопротивлений между концами каждой ветви и расчета каждого из сопротивлений по специальной методике. 2 табл..
Таблица 1
Таблица2
| Устройство для функционального контроля систем управления | 1977 |
|
SU732820A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР № 1389500, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
