Изобретение относится,к грузозах- ватным устройствам для шт учных цилиндрических грузов с захватом с боковых сторон и может быть использовано для захвата, например, бочек различных диаметров.,
: Известно грузозахватное устройство, в котором механизм фиксации снабжен ползуном, установленным на стойке и прикрепленным к серьге, на которой шарнирно закреплена подпружиненная собачка, а дополнительная собачка, шарнирно закрепленная на серьге и взаимодействующая с храповым колесом и противовесом, закрепленным -на серьге, при этом ось серьги расположена в фигурном пазу стойки и выполнена с двумя параллельными плоскими поверхностями, кроме того, колящие.губки установлены с помощью резьбового соединения 1 .
Недостатком этого устройства является то, что регулировка и настройка на различный Типоразмер груза осуществляется за счет фиксации -; со- осных отверстий на нижних плечах ч двуплечих рычагов, а колщйе губки на резьбе, ненадежно зажимают груз, имея только одну точку соприкос новенияо Такое выполнение прижимных губок не позволяет поднимать тяже- : лые грузы,. что также нейадёжнб в эксплуатации „ .
Целью. Изобретения является повышение надежноетио : -: -/.;
Это достигается тем, что в захвате,, прорезь зажимные губки выполнены прямоугольного поперечного сечения, боковые стороны нижних плеч двуплечих рычагов% образующие прорезь, выполнены наклонными от вертикальной оси симметрии несущего элемента пазами, губки выполнены на верхних плоскостях с поперечными сквозными углублениями, наклонными к вертикальной оси симметрии несущего
i I
О
3
элемента, при этом устройство снабжено тягами, расположенными с боковых сторон нижних двуплечих рычагов и соединенными между собой нижними концами, пальцами, расположенными в прорезях нижних плеч двуплечих рычат гов и наклонных их пазах, и жестко закрепленными на внутренних по отношению к продольным осям зажимных губок с
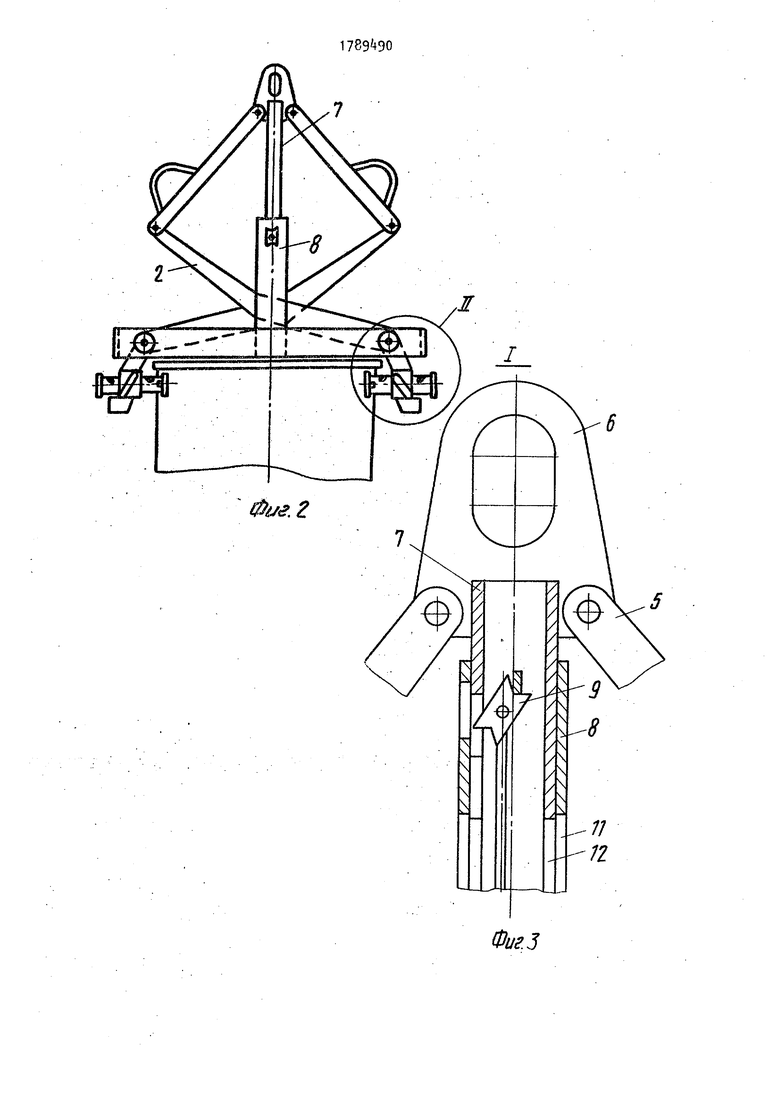
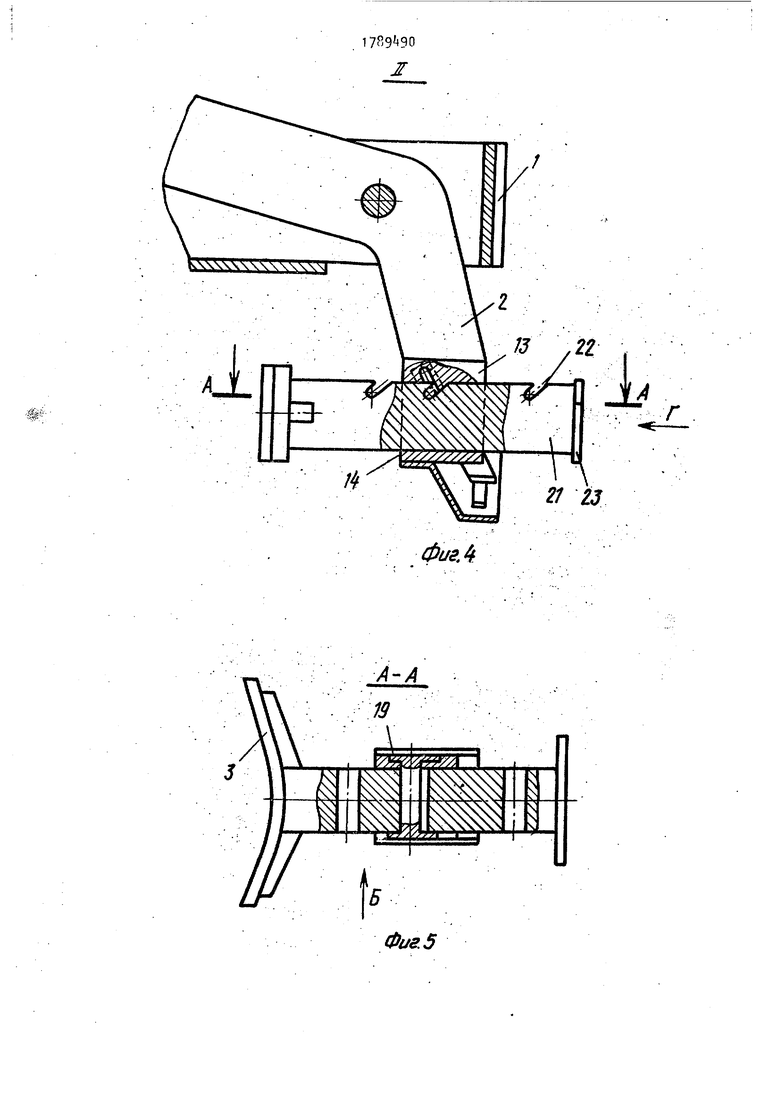
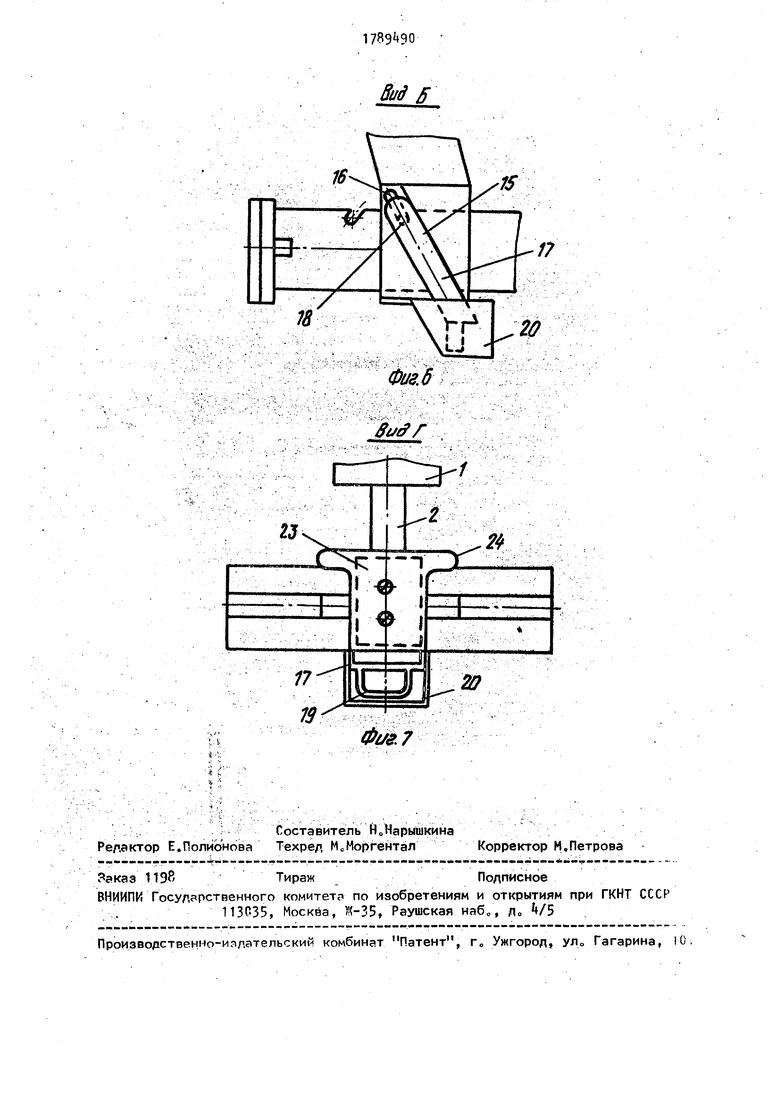
На фиг.1 изображен общий вид грузозахватного устройства при наведении на груз; на фиг.2 - то жег при подъеме груза; на фиг. 3 - узел I на фигЛ .(фиксатор рычагов); на фиг. 4 - узел II на .(механизм перенастройки захватных скоб на другой диаметр цилиндрических грузов); на фиг„5 разрез по А-А на фиг,; на фиг.с 6 - вид по стрелке Б на фиго5; на фиг„ 7 - вид по стрелке Г на фиг о 4
Грузозахватное устройство состоит из рамы 1, на которой закреплены поворотные рычаги 2, на нижних концах закреплены перенастраиваемые скобы для зажатия цилиндрических грузов k разного диаметра. Верхние плечи рычагов 2 шарнмрно соединены с тягами 5 со строповочной проушиной б, закрепленной на верхнем конце ползуна 7, подвижного в направляющей 8, закрепленной на раме 1, В полости ползуна 7 и направляющей 8 установлен автоматический фиксатор в виде широко известной четырехтактной звездочки 9 - - . : ..-. - . . . - : -
На тягах 5 закреплены рукоятки 10 для наведения захвата на груз k0 Для компактности конструкции рычаги 2 проходят через направляющую 8, для этого в ней и в ползуне 7 образованы прорези 11 и 12. Для перенастраи- вания каждой захватной скобы 3 слу-. жит механизм, состоящий из закрепленной на нижнем конце рычага 2 обоймы 13 с проемом 14 прямоугольной формы, на наружных поверхностях обоймы 13 имеются наклонные пазы 15 и наклонные отверстия 16, оси симметрии пазов и отверстий совпадают. В пазах 15 расположена тяга 17,,ниж ние концы сторон которых соединены, причем противоположные стороны тяги
17 связаны жестко прикрепленным штифтом 18. таким образом, что штифт
18 расположен внутри отверстия 16 обоймы 13о На тяге 17 жестко .прикреп
894904
лены рукоять 19 для удобства перемещения тяги 17 со штифтом 18 вдоль пазов 15 и отверстий 16 обоймы 13С.
с Для предохранения от деформации и случайного перемещения рукояти 19: имеется защитный корпус 20„ Внутри обоймы 13 в прямоугольном проеме 1 расположен шток 21 также прямоуголь40 него сечения, последний имеет наклонные скругленные пазы 22, оси которых параллельны между собой с осями пазов 15 относительно продольной оси обоймы 13.
15 На противоположной стороне от скобы 3 на штоке 21 имеется ограничительный заплечик 23 и рукояти 24 для удобства вытягивания штока 21 относительно обоймы 13 о
0
5
0
5
0
Грузозахватное устройство работает следующим образом,
В зависимости от диаметра захватываемого груза 4 скобы 3 перенастраивают на необходимое расстояние между ними о
Для этого на каждой обойме 13 за рукоятки 19 перемещают штифт 18 в отверстии 16 с помощью тяги 17 по направляющим паза 15« Одновременно за рукояти 24 перемещают шток 21 в проеме 14 обоймы 13о При одновременном взаимном перемещении штока 21 и . штифта 18 происходит расфиксация штока 21 „ ..: -.
Перенастройка грузозахватного устройства на другой диаметр цилиндрического груза происходит следующим образом. За рукояти 2k перемещают шток 21 в проеме 14 до совпадения с Далее с помощью ру- заводят штифт 18
нужным пазом 22, кояти 19 тяги 17 в паз 220
45 Формула изобретения
0
5
Грузозахватное устройство, содержащее несущий элемент, шарнирно закрепленные на нем двуплечие рычаги, нижние плечи которых выполнены с прорезями, расположенные в них подвижно зажимные губки, шарнирные тяги, нижние концы которых закреплены на верхних плечах двуплечих рычагов, верхние связаны с подвеской для крюка грузоподъемной машины, четырехтактный ме ханизм фиксации положения двуплечих рычагов, включающий вертикальную направляющую, жестко закрепленную на
5 . 1
несущем элементе, расположенный в ней ползун, на верхней части которо- го закреплена упомянутая подвеска, отличающееся тем, что с целью повышения надежности, прорезь и зажимные губки выполнены прямоугольного поперечного сечения, боковые стороны нижних плеч двупле- чих рычагов, образующие прорезь, выполнены с наклонными от вертикальной оси симметрии несущего элемента пазами, губки выполнены на верхних плоскостях с поперечными сквозными угВ9 (9Г6
лублениями, наклонными к вертикальной оси симметрии несущего элемента, при этом устройство снабжено тягами, с расположенными с боковых сторон нижних плеч двуплечих рычагов и соединенными между собой нижними концами, пальцами, расположенными в прорезях нижних плеч двуплечих рычагов и на- Ю клонных их пазах, и жестко закрепленными на внутренних по отношению к продольным осям зажимных губок плоскостях тяг с возможностью расположения в углублениях зажимных губок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для группы грузов | 1988 |
|
SU1546406A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1992 |
|
RU2009981C1 |
| Грузозахватное устройство | 1990 |
|
SU1744036A1 |
| Грузозахватное устройство | 1987 |
|
SU1497147A1 |
| Грузозахватное устройство | 1987 |
|
SU1491799A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| Клещевая головка ковочного манипулятора | 1982 |
|
SU1055583A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
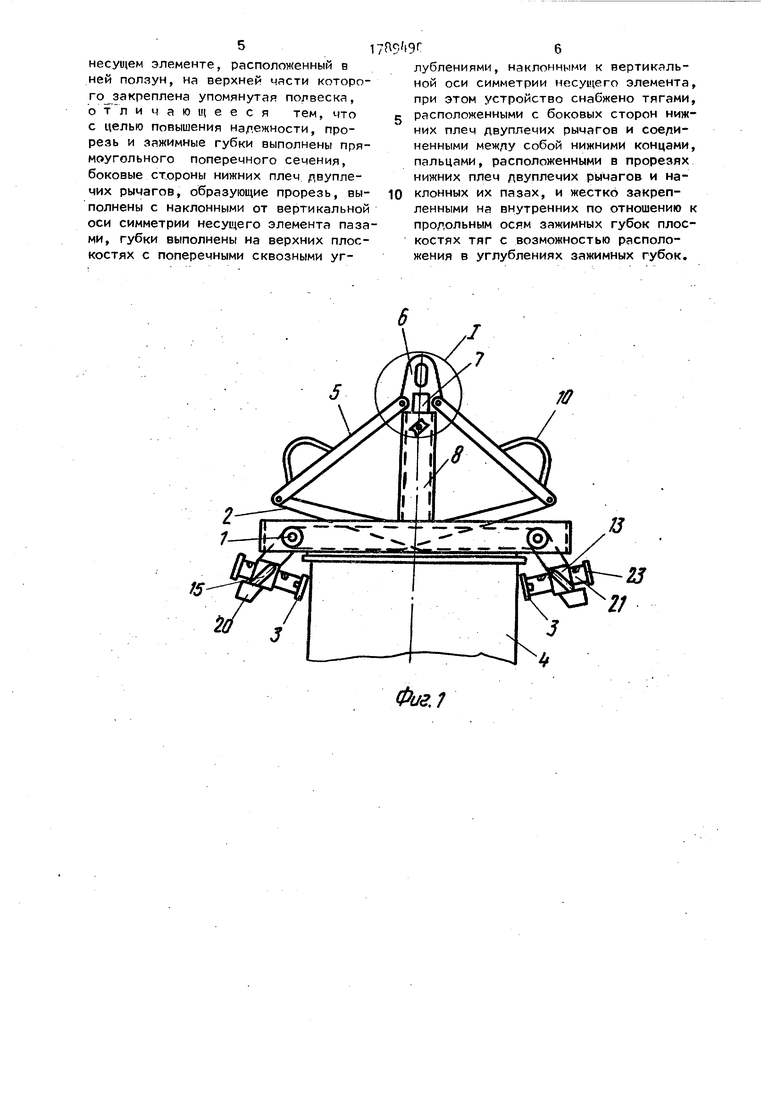
Использование - захват и транспортировка грузов Грузозахватное устройство, содержащее двуплечие ры чаги, нижние плечи которых выполнены с прорезями прямоугольного поперечного сечения и наклоййымй п азамй для расположения палЦев;, койць которых жестко закреплены на тягах При этом в зажимных губках выполнены поперечные сквоз иые наклонные уг- лубления для фиксирования зажимных губок пальцами 7 ил.
Фиг.1
я
-8
11 П
Фие.З
Ј
QbtfUil
Вид 5
| Авторское свидетельство СССР , кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
