Изобретение относится к подъемно- транспортной технике, в частности к захватам для группы грузов.
Цель изобретения - расширение эксплуатационных возможностей путем обеспечения одновременного захвата группы цилиндрических изделий разного диаметра.
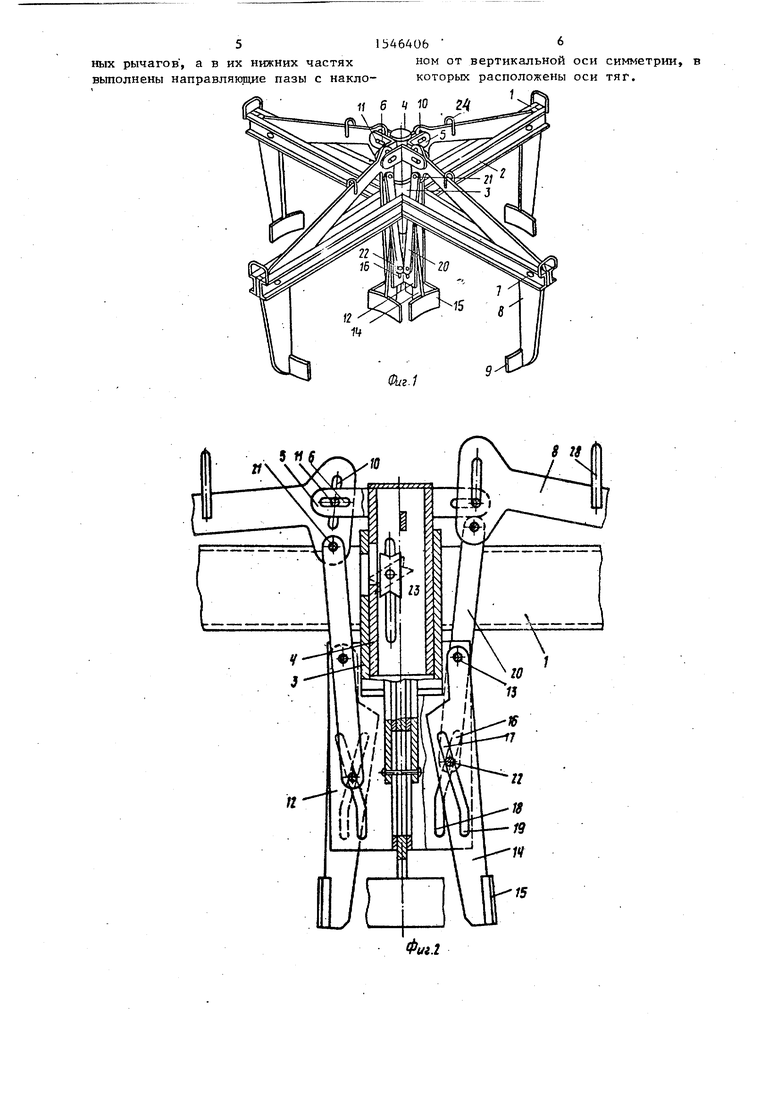
На фиг. 1 показан захват для группы грузов, общий вид;, на фиг. 2 - то же, продольный разрез центральной части.
Захват для группы грузов состоит из крестообразной траверсы 1, образованной из сходящихся в центре металлических балок 2, с вертикальным отверстием 3 в центральной части, в котором подвижно установлен шток 4 с верхней крестообразной траверсой 5, имеющей продольные прорези 6. На концах верхней крестообразной траверсы 1 посредством осей 7 шарнирно закреплены двуплечие захватные рычаги 8 с зажимными губками 9. На концах верхних плеч этих рычагов 8 имеются поперечные прорези 10, эти концы рычагов расположены между балками верхней крестообразной траверсы 5 и в прорезях 6 и 10 установлены плавающие горизонтальные оси 11.
К центральной части верхней крестообразной траверсы / прикреплены парные вертикально расположенные кронштейны 12, между которыми на осях 13 подвешены дополнительно захватные рычаги 14 с зажимными губками 15. В кронштейнах 12 дополнительных захватных рычагов 14 образованы наклонные пазы 16 и 17 с противоположным наклоном, нижние части 18 и 19 этих прорезей имеют одинаковое вертикальное направление, которое соответствует нерабочему ходу при переключении фиксатора. Тяги 20 соединены
СП
Јь
%
О
о
верхними концами с помощью осей 21 с концами верхних плеч захватных рычагов 8, а нижними концами с помощью горизонтальных осей 22 с дополнительными захватными рычагами 14, при этом оси 22 проходят через пазы 16 и 17 кронштейнов 12 дополнительных захватных рычагов 14,
В полости штока 4 расположен меха низм фиксации 23 положений двуплечих захватных рычагов 8.
Захват для группы грузов используют следующим образом.
Грузовой строп подъемную машину соединяют со скобами 24 и механизм фиксации 23 положений захватных рычагов 8 устанавливают в исходное положение с фиксацией раскрытых захватных рычагов 8-и 14„ После этого захват поднимают, наводят на группу цилиндрических грузов и опускают до опира- ния на них нижней крестообразной траверсы 1 и перемещения вниз штока 4, который переключает механизм фиксации 23. При дальнейшем ослаблении стропа двуплечие захватные рычаги 8 будут.продолжать перемещение, которое ограничено перемещением вниз тяг 20 за счет опирания осей 22 в нижние концы совмещенных вертикальных частей 18 и 19 пазов 16 и 17 в кронштейнах 12 и дополнительных захватных рычагах 14,
При последующем перемещении вверх захвата двуплечие захватные рычаги 8 начинают поворот, дополнительные рычаги 14 остаются неподвижными до прохождения осей 22 вертикальных частей 18 и 19 пазов 16 и 17, что соответствует обратному ходу переключения механизма фиксации 23, после чего начинается поворот дополнительных захватных рычагов 14 за сч ет клинового эффекта, возникающего при перемещении осей 22 в наклонных частях пазов 16 и 17. При захвате цилиндрических грузов различного диаметра сначала происходит зажатие груза большего диаметра, при этом зажимающая его пара захватных рычагов 8 и 14 прекращает свободное перемещение. Остальные пары захватных рычагов 8 и 14 продолжают перемещение, увлекая за собой шток 4, перемещению которого не препятствует пара прекративших движение рычагов 8 и 14 за счет плавающих осей 6, расположенного в прорезях 6 и 10. Таким же образом происходит последова-
5
0
Q
5
0
5
0
5
0
5
тельное индивидуальное зажатие остальных цилиндрических грузов по мере уменьшения их диаметра.
Формула изобретения
Захват для группы грузов, содержащий крестообразную нижнюю траверсу с вертикальным отверстием в центральной части, шарнирно закрепленные на ее концах двуплечие захватные рычаги, на концах нижних плеч которых закреплены зажимные губки; а концы верхних плеч выполнены с прорезями, верхнюю крестообразную траверсу, связанную с верхними плечами двуплечих захватных рычагов посредством горизонтальных осей, расположенных в их прорезях, и связанную с нижней крестообразной траверсой механизмом фиксации положений двуплечих захватных рычагов, расположенным в ее вертикальном отверстии, связанные посредством горизонтальных с нижней крестообразной траверсой дополнительные захватные рычаги, выполненные с наклонными в вертикальной оси симметрии пазами в нижних плечах, тяги, связанные нижними концами с дополнительными захватными рычагами посредством осей, расположенных в их пазах, и подвесной орган для соединения с подъемной машиной, о т- личающийся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения одновременного захвата группы цилиндрических изделий разного диаметра, верхняя крестообразная траверса выполнена с продольными прорезями в ее бачках для свободного расположения в них горизонтальных осей соединения с верхней крестообразной траверсой верхних плеч двуплечих захватных рычагов, прорези в которых выполнены поперечно, верхние концы тяг шарнирно закреплены на концах верхних плеч двуплечих захватных рычагов, а орган соединения подъемной машиной выполнен в виде жестко закрепленных на верхних плечах двуплечих захватных рычагов скоб, при этом устройство снабжено вертикально расположенными кронштейнами, закрепленными в центральной нижней части нижней крестообразной траверсы- под ее балками, в верхних частях которых закреплены горизонтальные оси двуплечих захват51Ь46406 6
ных рычагов, а в их нижних частях ном от вертикальной оси симметрии, в выполнены направляющие пазы с накло- которых расположены оси тяг.
1.
Фиг 1

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1989 |
|
SU1615134A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Автоматический захват | 1983 |
|
SU1174366A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МЯГКИХ ГРУЗОВ | 1988 |
|
SU1563151A1 |
| Грузозахватное устройство | 1989 |
|
SU1712301A1 |
| Грузозахватное устройство | 1985 |
|
SU1382802A1 |
| Грузозахватное устройство | 1990 |
|
SU1740297A1 |
| Грузозахватное устройство | 1990 |
|
SU1776624A1 |
| Грузозахватное устройство | 1987 |
|
SU1493585A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - расширение эксплуатационных возможностей путем обеспечения одновременного захвата группы цилиндрических изделий разного диаметра. Захват для группы грузов содержит крестообразную траверсу 1, связанную с ней крестообразную траверсу 5 с продольными прорезями 6, двуплечие захватные рычаги 8 с поперечными прорезями 10. В прорезях 6 и 10 установлены плавающие горизонтальные оси 11 для соединения захватных рычагов с траверсой 5. 2 ил.
15
| Захват для группы грузов | 1987 |
|
SU1482877A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
