Изобретение относится к машиностроению, а именно к манипуляторам, предназначенным для механизации основных и вспомогательных операций, может быть использовано для загрузочно-разгрузочных работ в различных отраслях промышленности.
Известен захват манипулятора, содержащий неподвижный корпус, расположенный в нем, шток на котором установлены ползун и коромысло, причем ползун связан шарнирно с зажимными рычагами непосредственно, а коромысло - через серьги, при этом ползун подпружинен относительно корпуса и на ползуне шарнирно установлены собачки, имеющие возможность располагаться в пазах, выполненных на захватных рычагах, а на концах захватных рычагов смонтированы ролики, имеющие возможность взаимодействовать с базовой поверхностью (см. авторское свидетельство N 1511117, 4 B 25 J 15/00, бюл. N 36, 1989 г.).
Признаки, совпадающие, - наличие корпуса с расположенным в нем штоком привода, зажимные рычаги и серьгу.
Причины, препятствующие достижению технического результата, - большое количество шарнирных соединений, нет возможности эффективно использовать рабочую среду.
Известен схват, содержащий корпус и шарнирно установленные на нем рычаги с клиновидными захватными площадками, снабженные средством их поворота относительно корпуса, снабжен шарнирно установленным на корпусе двуплечими рычагами и закрепленными на корпусе электромагнитами с сердечниками, при этом каждый двуплечий рычаг подпружинен относительно корпуса, выполнен с возможностью ограниченного поворота и одним своим плечом кинематически связан с сердечником соответствующего электромагнита, а другое его плечо выполнено в виде четырехугольной рамы с направляющими пазами, в которых с возможностью ограниченного поступательного перемещения установлена введенная плоская рама, подпружиненная относительно соответствующей четырехугольной рамы, причем захватные рычаги закреплены на соответствующих плоских рамах. (см. авторское свидетельство N 1699765, 5 B 25 J 15/00, бюл. N 47, 1991 г.).
Признаки, совпадающие, - наличие подпружиненных относительно корпуса шарнирно установленных рычагов, одним своим плечом связанных с приводом, другим с захватами губками, перемещение их с возможностью поворота.
Причины, препятствующие достижению технического результата, - сложность конструкции из-за большого количества кинематических звеньев, нет возможности развивать значительные усилия и эффективно использовать рабочую среду, что снижает надежность работы и эксплуатационные возможности.
За прототип принято известное захватное устройство, содержащее корпус, в котором на параллельных осях установлены три двуплечих рычага, первое плечо каждого из которых снабжено зажимной губкой, а второе предназначено для связи с приводом, при этом двуплечие рычаги попарно соединены между собой посредством трех дополнительно введенных тяг, при этом каждая тяга шарнирно установлена на первом плече одного из рычагов и на втором плече другого рычага, кроме того, привод установлен на основании с возможностью взаимодействия с плечом одного из двуплечих рычагов (см. авторское свидетельство N 1609648, 5 B 25 J 15/00, бюл. N 44, 1990 г.).
Признаки, совпадающие, - наличие привода, корпуса, рычагов, снабженных зажимными губками, и соединены со стороны противоположной губкам со штоком привода.
Причины, препятствующие достижению технического результата, - сложность конструкции из-за большого количества шарнирных соединений, нет возможности эффективно использовать рабочую среду, что снижает надежность работы и эксплуатационные возможности.
Задачей предложенного изобретения является повышение надежности работы и эксплуатационных возможностей путем эффективного использования рабочей среды.
Сущность изобретения заключается в том, что в захвате, содержащем привод, корпус с установленными рычагами, каждый из которых снабжен зажимной губкой и соединен со стороны, противоположной губкам со штоком привода, при этом он содержит три рычага, которые выполнены подпружиненными, равносходимыми, S-образной формы с пересекаемыми в одной точке их геометрическими осями, которые шарнирно соединены со штоком привода посредством жестко закрепленной с ним серьги, и на них в средней части смонтированы ролики, перемещаемые по профильным направляющим корпуса. Это обеспечивает при сравнительно малом ходе достаточное перемещение рычагов, это позволяет повысить эффективность использования рабочей среды, а исполнение рычагов губок S-образной формы и соединения их со штоком привода посредством жестко закрепленной с ним серьги, дополнительно обеспечивает усилие за счет увеличения плеча рычага по мере выдвижения штока привода, в свою очередь повышает эксплуатационные возможности и исключает возможность заклинивания, все это повышает надежность работы.
Предлагаемый захват представлен на фиг. 1, где изображен общий вид захвата в разрезе; на фиг. 2 - разрез А-А на фиг. 1.
Захват, содержащий привод (1), корпус (2) с установленными рычагами (3), каждый из которых снабжен зажимной губкой (4) и соединен со стороны, противоположной губкам (4) со штоком (5) привода (1), при этом три рычага (3), которые выполнены подпружиненными пружинами (6), равносходимыми, S-образной формы с пересекаемыми в одной точке их геометрическими осями, и шарнирно соединены со штоком (5) привода (1) посредством жестко закрепленной с ним серьги (8), и на которых в средней части смонтированы ролики (7), перемещаемые по профильным направляющим корпуса (2).
Работает предлагаемый захват следующим образом - от привода (1) (например, пневматического), смонтированного в корпусе (2), посредством перемещения штока (5), который при подаче рабочей среды, перемещается вправо, воздействуя посредством жестко закрепленной с ним серьги (8) на три, подпружиненные пружинами (6), равносходимые рычага (3) губок, выполненных S-образной формы, при этом рычаги (3) с закрепленными на них в средней части роликами (7) перемещаются по профильным направляющим корпуса (2), соответственно тоже вправо и разворачиваются, происходит размыкание губок (4), с нарастающим усилием, при обратном ходе штока (5) рычаги губок S-образной формы (3) отводятся, и перемещаясь по направляющим корпуса (2) разворачиваются в обратном направлении, происходит смыкание губок (4). При размыкании губок (4) производится захват по внутренней поверхности детали (типа втулки) при смыкании по наружной (типа вала).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОСЕКАТОР | 1999 |
|
RU2150817C1 |
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1639846A1 |
| Устройство для подачи заготовок в рабочую зону | 1976 |
|
SU571330A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Перекладыватель заготовок к прессу | 1979 |
|
SU863427A1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |

Изобретение относится к машиностроению, а именно к манипуляторам, предназначенным для механизации основных и вспомогательных операций. Захват содержит привод, корпус и установленные в нем три рычага. Каждый рычаг снабжен зажимной губкой и соединен со стороны, противоположной губкам, со штоком привода. Рычаги выполнены подпружиненными, равносходимыми, S-образной формы с пересекаемыми в одной точке их геометрическими осями. Они шарнирно соединены со штоком привода посредством жестко закрепленной с ним серьги и в средней их части смонтированы ролики, перемещаемые по профильным направляющим корпуса. Изобретение позволит повысить эффективность использования рабочей среды, исключить возможность заклинивания. 2 ил.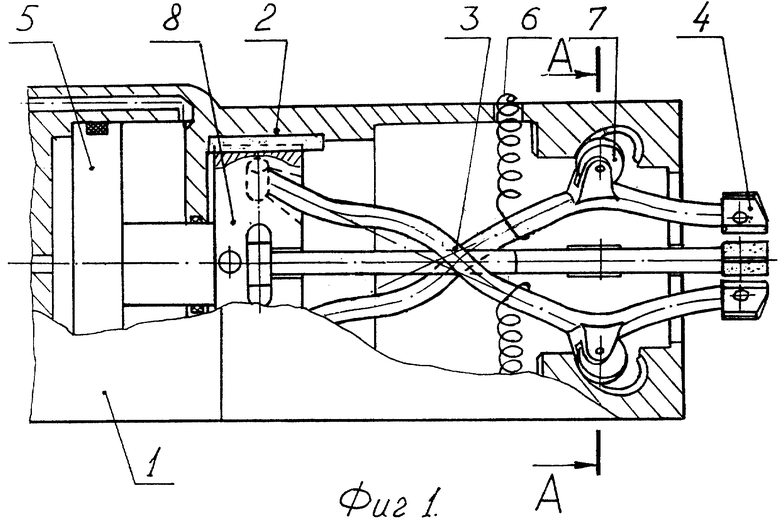
Захват, содержащий привод, корпус с установленными рычагами, каждый из которых снабжен зажимной губкой и соединен со стороны, противоположной губкам, со штоком привода, отличающийся тем, что он содержит три рычага, которые выполнены подпружиненными, равносходимыми, S-образной формы с пересекаемыми в одной точке их геометрическими осями, и шарнирно соединены со штоком привода посредством жестко закрепленной с ним серьги, и на которых в средней части смонтированы ролики, перемещаемые по профильным направляющим корпуса.
| Схват регулируемый | 1988 |
|
SU1609648A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| RU 2005062, 30.12.1993 | |||
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| DE 4029631 A1, 26.03.1992 | |||
| УСТРОЙСТВО ДЛЯ ВНУТРИПОЧВЕННОГО ИЗМЕРЕНИЯ АГРОТЕХНОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ПАХОТНОГО СЛОЯ ПОЧВЫ В ДВИЖЕНИИ | 2013 |
|
RU2537908C2 |
