Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов.
Известен схват промышленного робота, содержащий ползун, установленный в пазу корпуса, серьги, связанные посредством осей с рычагами, соединенные с губками и приводом.
Недостатком этого схвата является невозможность адаптации положения губок до положения детали, поэтому необходимо, чтобы продольная ось схвата точно совпадала с осью симметрии детали, так как в противном случае конструкция схвата испытывает дополнительные нагрузки, ведущие к износу или поломке схвата.
Близким техническим решением, принятым за прототип, является схват, содержащий ползун, установленный в пазу корпуса, серьги, связанные посредством осей с рычагами, несущую губку, сухарь и привод, снабженный плоской пружиной, жестко соединенной с приводом траверсой, связанной с ползуном, в котором выполнен паз, причем сухарь и фиксатор располагают в этом пазу, а плоскую пружину располагают между фиксатором траверсой.
Недостатком данного технического решения является ничтожно малое допустимое смещение детали относительно оси симметрии, так как конструкция обеспечивает лишь ограниченную возможность перемещения подпружиненного сухаря.
Цель изобретения - расширение технологических возможностей.
Это достигается тем, что устройство, содержащее корпус, силовой цилиндр со штоком, поперечную трубчатую штангу с прорезями, в которых установлены подпружиненные упругим элементом, размещенным в трубчатой штанге, зажимные губки, соединенные тросом со штоком через ролики, снабжено смонтированной на конце штока плоской пластинчатой двухканальной пружиной, на которой закреплены ролики, при этом упругий элемент выполнен в виде цилиндрической пружины растяжения.
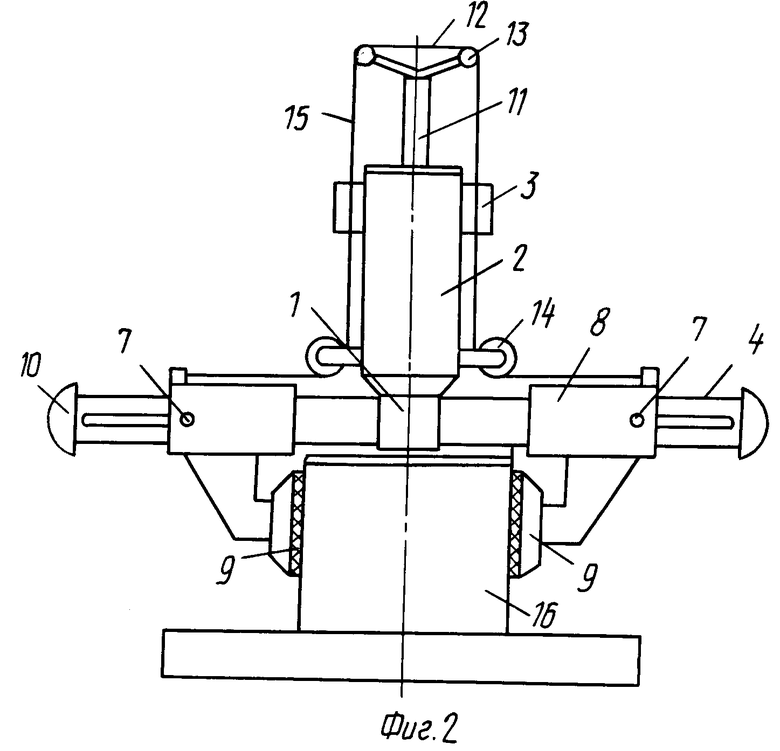
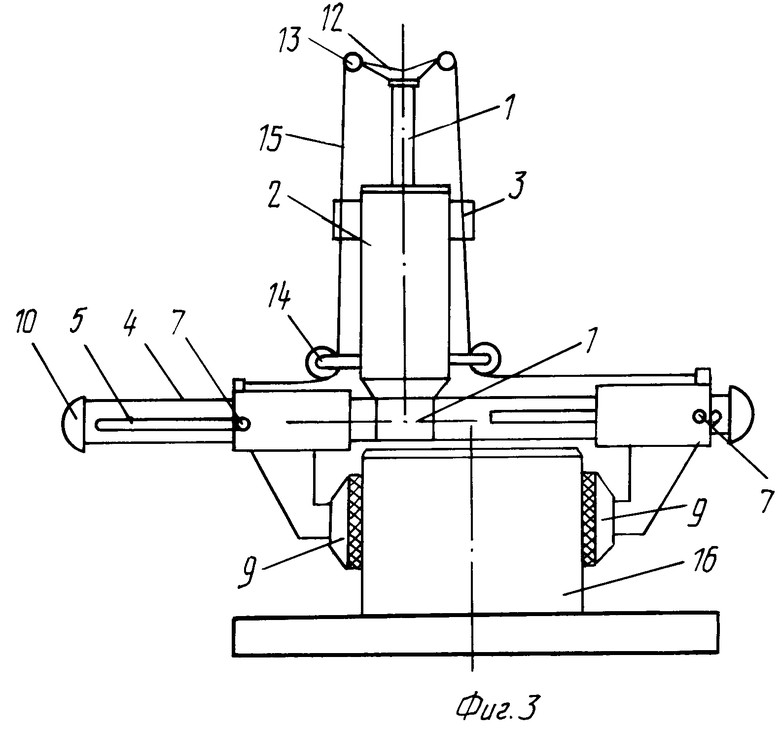
На фиг. 1 показано захватное устройство, общий вид; на фиг. 2 - захват детали, расположенной симметрично относительно корпуса; на фиг.3 - то же, несимметрично относительно корпуса.
Захватное устройство содержит корпус 1 с силовым цилиндром 2, смонтированным на механической руке 3. На корпусе установлена поперечная трубчатая штанга 4 с продольными прорезями 5 и размещенной внутри пружиной 6, опирающимися на штифты 7 скользящими втулками 8 с присоединенными к ним зажимными губками 9. На концах поперечной трубчатой штанги установлены заглушки 10, а на штоке 11 на плоской пластинчатой двухконсольной пружине 12 закреплены ролики 13. Через эти ролики и опорные ролики 14, закрепленные у основания гидроцилиндра, осуществлена гибкая связь тросом 15 втулок 8, зажимных губок 9 со штоком 11 силового гидроцилиндра 2. Между зажимными губками 9 размещена захватываемая деталь 16.
Захватное устройство работает следующим образом.
Захватное устройство устанавливается над деталью 16 и после перемещения штока 11 вниз происходит ослабление троса 15 гибкой связи. В результате этого под действием пружины 6 втулок 8 зажимные губки 9 перемещаются в стороны заглушек 10. Затем механическая рука 3 со всем оборудованием опускается на величину возможности захвата зажимными губками 9 детали 16. После этого подачей рабочей жидкости в поршневую полость силового гидроцилиндра 2 осуществляется выдвижение штока 11 вверх. Через трос 15 гибкой связи зажимные губки 9 перемещаются навстречу друг другу по направлению к детали 16 и зажимают ее. В связи с тем, что ролики 13, установленные на конце штока 11, подпружинены, осуществляется упругий захват детали.
При захвате несимметрично размещенной детали 16, например, вправо (фиг. 3) гибкая связь между штоком 11 силового гидроцилиндра 2 и зажимными губками 9 допускает такой же надежный захват и удержание детали, как и при симметричном ее размещении. При захвате детали, смещенной вправо зажимная губка 9 правая, соприкоснувшись с деталью, останавливается, а шток 11, продолжая перемещаться вверх, подтягивает к детали левую зажимную губку 9. После соприкосновения обеих зажимных губок 9 с деталью и соответствующим дальнейшим перемещением штока 11 осуществляется захват и удержание детали с необходимой силой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022779C1 |
| Захватное устройство робота | 1986 |
|
SU1400877A1 |
| Захватное устройство | 1984 |
|
SU1255425A1 |
| Адаптивное захватное устройство | 1986 |
|
SU1399114A1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| Адаптивное захватное устройство | 1986 |
|
SU1454689A1 |
| Захватное устройство манипулятора | 1990 |
|
SU1756146A1 |
Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов. Цель изобретения - повышение технологических возможностей путем адаптации положения зажимных губок. Захватное устройство содержит корпус 1 с гидроцилиндром 2, смонтированным на руке 3. На корпусе установлена поперечная полая штанга 4 с продольными прорезями 5 и размещенной внутри пружиной 6, соединенной с зажимными губками 9, которые связаны со штоком 11 через ролики 14 и гибкую связь 15. 3 ил.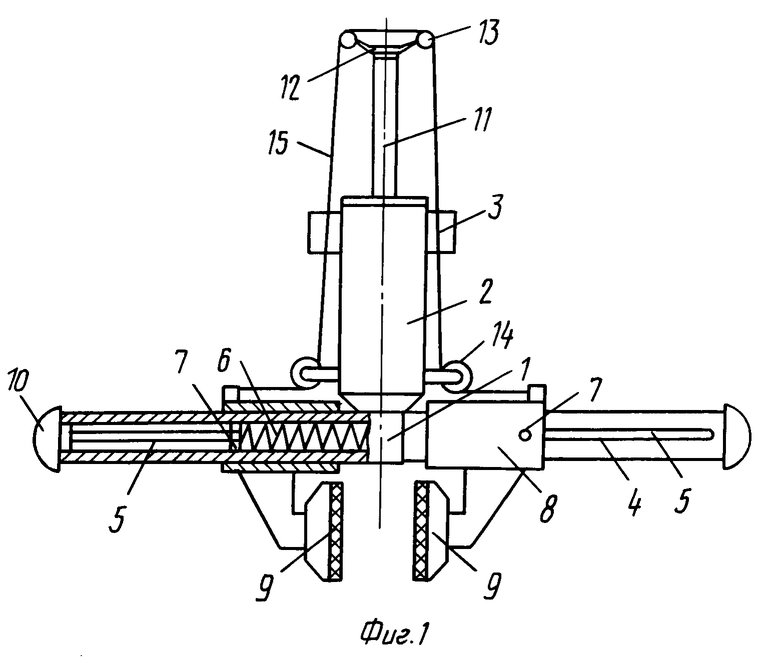
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус, силовой цилиндр со штоком, поперечную трубчатую штангу с прорезями, в которых установлены подпружиненные упругим элементом, размещенным в трубчатой штанге, зажимные губки, соединенные тросом со штоком через ролики, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено смонтированной на конце штока плоской пластинчатой двухконсольной пружиной, на которой закреплены ролики, при этом упругий элемент выполнен в виде цилиндрической пружины растяжения.
| Захватное устройство | 1986 |
|
SU1373567A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
