Известные электромеханические интеграторы обладают зоной нечувствительности, которая в основном определяется моментом сухого трения оси ротора двигателя в опорах качения.
В нредлол енном устройстве для повышения чувствительности и точности работы полый ротор асинхронного двигателя выполнен в виде неплавка, а вместо подшипников качения иснользованы твердые подшинники скольжения.
Прибор помещен п герметический корпус, заполненный жидкостью. Это позволяет использовать опоры ТОЛЬКО ДЛЯ центровки, так как ротор находится во взвешенном состоянии.
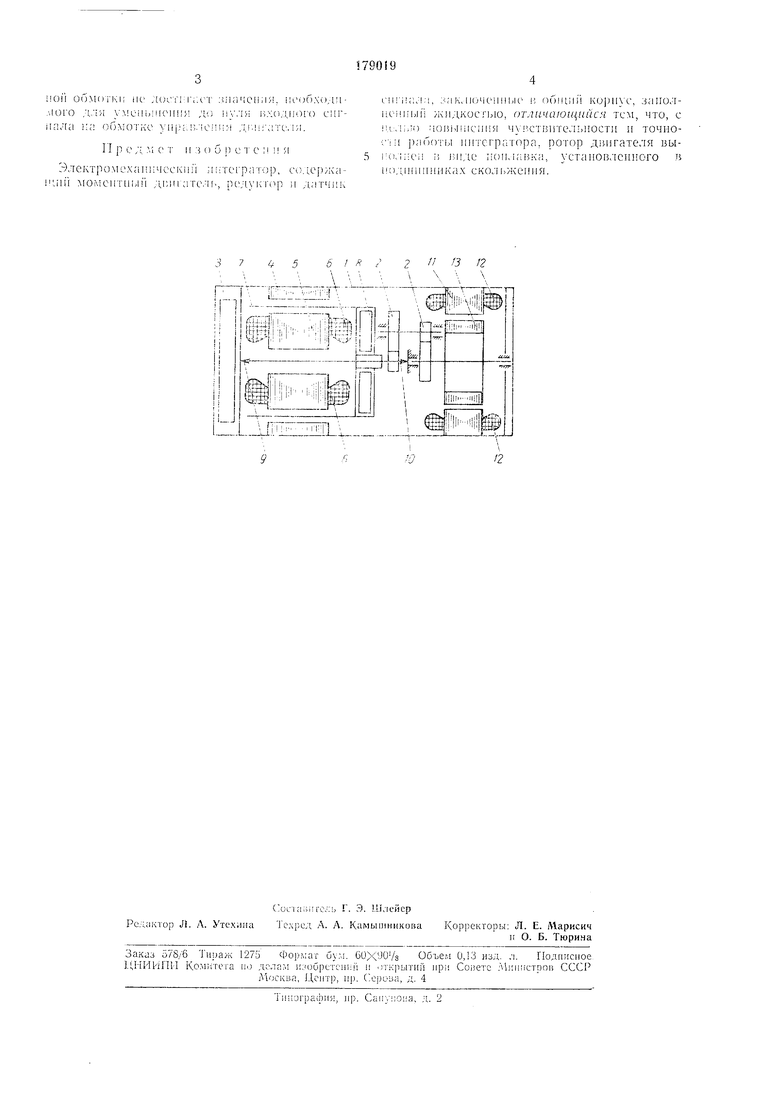
На чертеже дана конструктивная схема электромеханического интегратора.
В герметическом корпусе 1, залитом демпфируюш,ей жидкостью, встроены двигатель, датчик сигнала, редуктор 2 и сильфон 3.
Двухфазный, управляемый, асинхронный двигатель работает в пусковом режиме. Он состоит из наружного пакета 4 статора, внутреннего пакета 5 статора с двухфазной обмоткой 6 (обмоткой возбуждения и обмоткой управления) и ротора 7.
ка 8. Она утолн ена н имеет герметическую ПОЛОСТЬ, заполненную атмосферным воздухом. Благодаря такой конструкции, ротор 7 на.ходится во взвешенном состояннн и не оказывает давлення на опоры.
В качестве опор нспользованы нодшипникн 9 и 10 из твердого материала, например агата, статический момент которых не зависит от температуры и положения ротора, так как
ротор ие оказывает давления на подшипники и поэтому последние служат, в осиовном, для центрирования ротора.
В качестве датчика сигнала использован кольцевой датчик ограниченного вращения.
Датчик сигнала состоит из статора П с двумя обмотками 12 (обмотка возбуждеиия датчика и сигнальная) н зубчатого ротора /5 из магнитного материала. Между моментным двигателем н датчиком
сигнала установлен редуктор 2, ведуший элемент которого соединен с валом моментиого двигателя, а вы.ходной - с валом датчика сигнала.
Когда на обмотке управления двигателя иоявляется ианряжение, большее чем напряжение трогания, ротор двигателя начинает врашаться, и это вращение через редуктор нередается на ротор датчика. Вращение замедляется демпфирующей жидкостью и продолri p СЛ, M 0 т II 3 о 5 p с т e :i я
Злектромохапически niireipniop, соде)к;1lUiiii момеиппл ;i,i;in ;rrc.i., pcvtyiiii p и дптчш
С11гп;;., .N())i( i; oouuiii KOjMixc, заполiicinibiii жидкоеПЛО, отличающийся тем, что, с iuvii;;) aoiibiiiiciiiisi чупствитедьности и точио( paooTiji интегратора, ротор дингателя выi4-i,;:;ei 1;пде иопд.шка, уетановдспиого п If од ill пи инках скольжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ МНОГОКОНТАКТНОЕ РТУТНОЕУСТРОЙСТВО | 1970 |
|
SU277050A1 |
| Электромеханический интегратор | 1980 |
|
SU855680A1 |
| УСТРОЙСТВО ГРУППОВОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ НА ШИНАХ ЭЛЕКТРОСТАНЦИИВСЕСОЮЗНАЯ | 1971 |
|
SU316170A1 |
| Устройство для уравновешивания изделий | 1978 |
|
SU763711A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2465715C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА СЕЛЬСКОХОЗЯЙСТВЕННОГО МЕХАНИЗМА ОТ РАБОТЫ В АВАРИЙНЫХ РЕЖИМАХ | 1994 |
|
RU2074471C1 |
| СУДОВОЕ АВТОМАТИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО | 1966 |
|
SU180974A1 |
| РОТОРНАЯ УПРАВЛЯЕМАЯ СИСТЕМА С ЭЛЕКТРОПРИВОДОМ ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДОЛОТА | 2017 |
|
RU2690238C1 |
| Ротационный электровискозиметр | 1982 |
|
SU1055995A1 |
ьг
2 // /3 /г
