Изобретение относится к электротехнике, в частности к асинхронным электроприводам с частотно-токовым управлением, и может быть использовано в промышленных, транспортных и приборных электромеханических системах.
Наиболее близким к заявляемому изобретению по технической сущности является моментный асинхронный электропривод, выбранный в качестве прототипа, см. патент RU №2192705, МПК7 Н02Р 5/28, опубл. 10.11.2002.
Известный моментный асинхронный электропривод содержит асинхронный двигатель с двумя фазами на статоре и с короткозамкнутым ротором, датчик частоты вращения, первый - второй сумматоры, первый - второй функциональные преобразователи, первый - третий перемножители, интегратор, идентификатор знака, корнеизвлекающее устройство, первый - второй усилители тока. Ротор двигателя механически связан с ротором датчика частоты вращения. Его выход подключен к первому входу первого сумматора, к инвертирующему, второму входу второго сумматора и к входу второго функционального преобразователя, выход которого подключен к первому входу третьего перемножителя. Его второй вход подключен к выходу идентификатора знака, а выход подключен ко второму входу первого сумматора, выход которого подключен к входу интегратора. Его выход подключен к первому входу второго сумматора, выход которого подключен к входу первого функционального преобразователя, косинусный и синусный выходы которого подключены к первым входам соответственно первого, второго перемножителей. Их вторые входы подключены к выходу корнеизвлекающего устройства, а их выходы подключены к входам соответственно первого, второго усилителей тока. К их выходам подключены соответственно первая, вторая фазы двигателя. Входом электропривода являются входы идентификатора знака, корнеизвлекающего устройства и третий вход первого сумматора. Первый функциональный преобразователь формирует на выходах сигналы, пропорциональные косинусу и синусу входного сигнала, а второй функциональный преобразователь формирует сигнал, пропорциональный модулю оптимальной частоты скольжения согласно приведенному в описании алгоритму.
Недостатком данного электропривода является отсутствие учета насыщения магнитопровода и потерь в стали статора и ротора, что оказывает существенное влияние на результаты решения задачи оптимального управления токами асинхронного двигателя.
Технической задачей изобретения является учет насыщения магнитопровода и потерь в стали асинхронного двигателя, повышение энергоэффективности работы моментного асинхронного электропривода.
Поставленная задача решается тем, что в моментном асинхронном электроприводе, содержащем асинхронный двигатель с короткозамкнутым ротором, датчик частоты вращения, сумматор, первый функциональный преобразователь, перемножители, интегратор, усилители тока, при этом ротор асинхронного двигателя механически связан с ротором датчика частоты вращения, выход которого подключен к инвертирующему второму входу сумматора, к первому входу которого подключен выход интегратора, выход сумматора подключен к входу первого функционального преобразователя, его выходы подключены к первым входам перемножителей, их выходы подключены к входам усилителей тока, к их выходам подключены обмотки статора асинхронного двигателя, причем первый функциональный преобразователь формирует на выходах сигналы, пропорциональные синусу угла поворота магнитного поля статора с учетом угла сдвига фаз, согласно изобретению в него введены второй функциональный преобразователь, первый вход которого подключен к входу электропривода, второй вход подключен к выходу датчика частоты вращения, а выход подключен к входу интегратора, и третий функциональный преобразователь, его первый вход подключен к входу электропривода, его второй вход подключен к выходу датчика частоты вращения, а выход подключен ко вторым входам перемножителей, причем второй функциональный преобразователь формирует на выходе сигнал, равный скорости поворота магнитного поля статора без учета форсировки по частоте вращения ротора, а третий функциональный преобразователь формирует на выходе сигнал, равный амплитудному значению системы фазных токов статора.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении энергоэффективности работы электропривода за счет учета насыщения магнитопровода и потерь в стали статора и ротора асинхронного двигателя.
Изобретение поясняется следующими чертежами:
на фиг.1 представлена функциональная схема моментного асинхронного электропривода;
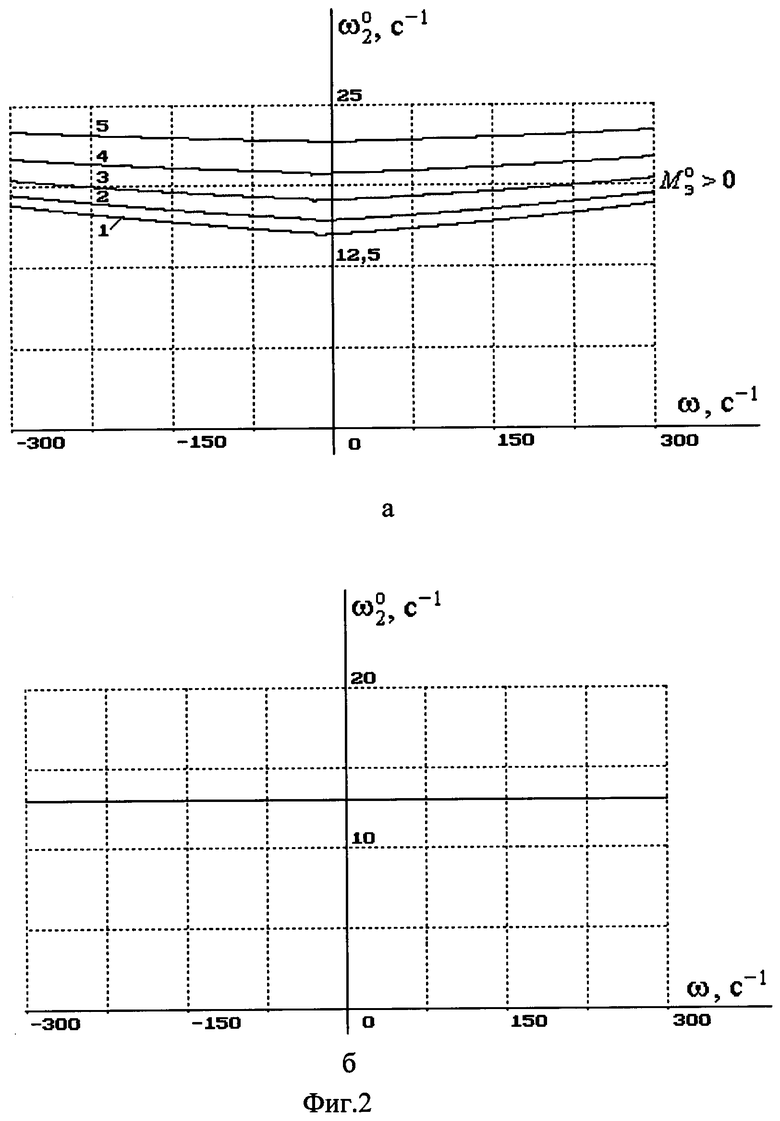
на фиг.2 показаны графики зависимостей оптимальной частоты скольжения от частоты вращения ротора при различных значениях требуемого электромагнитного момента для изобретения (а) и для прототипа (б);
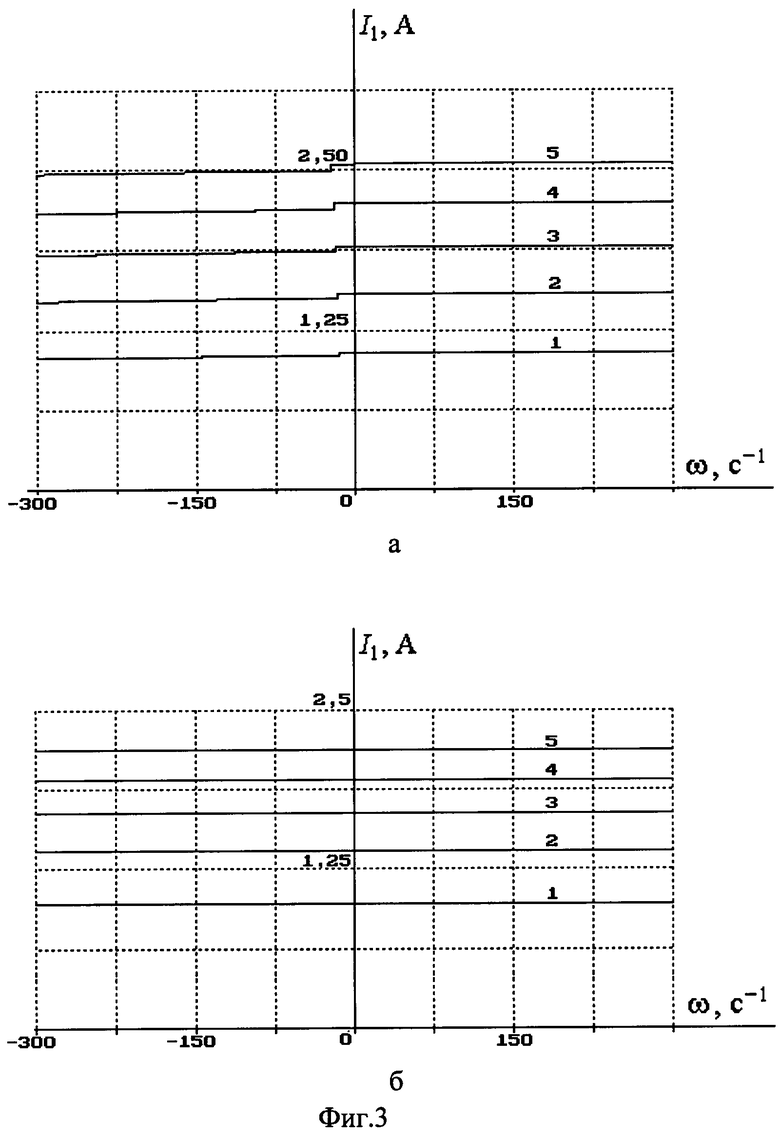
на фиг.3 показаны графики зависимостей действующего значения тока статора от частоты вращения ротора при различных значениях требуемого электромагнитного момента для изобретения (а) и для прототипа (б);
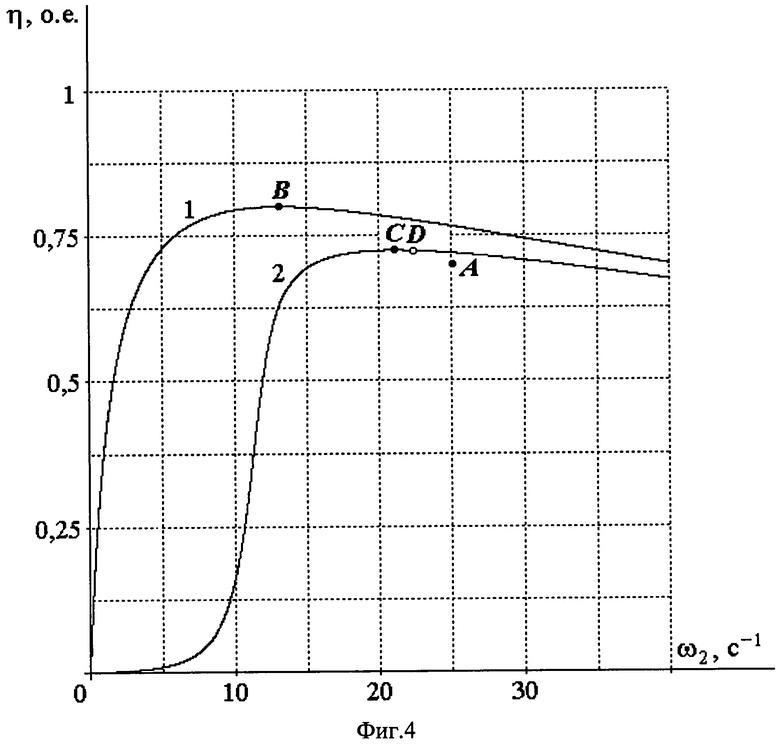
на фиг.4 приведены графики зависимостей коэффициента полезного действия (КПД) от угловой скорости скольжения.
Моментный асинхронный электропривод (фиг.1) содержит асинхронный двигатель 1 с трехфазной обмоткой статора 2-4 и короткозамкнутым ротором 5, датчик частоты вращения 6, первый - третий функциональные преобразователи 7-9, интегратор 10, сумматор 11, первый - третий перемножители 12-14, первый - третий усилители тока 15-17.
Ротор 5 механически связан с ротором датчика частоты вращения 6. Его выход подключен к инвертирующему, второму входу сумматора 11 и ко вторым входам второго и третьего функциональных преобразователей 8, 9. Выход второго функционального преобразователя 8 подключен к входу интегратора 10, выход которого подключен к первому входу сумматора 11. Его выход подключен к входу первого функционального преобразователя 7, выходы которого подключены к первым входам первого - третьего перемножителей 12-14. Их вторые входы подключены к выходу третьего функционального преобразователя 9, а их выходы подключены к входам соответственно первого - третьего усилителей тока 15-17. К их выходам подключены соответственно обмотки статора 2-4 асинхронного двигателя 1. Входом электропривода являются первые входы второго и третьего функциональных преобразователей 8, 9.
Моментный асинхронный электропривод работает следующим образом. Датчик частоты вращения 6 вырабатывает сигнал, пропорциональный частоте вращения ротора ω, который поступает на инвертирующий второй вход сумматора 11 с коэффициентом kфJΣ и на вторые входы второго и третьего функциональных преобразователей 8, 9. Входной сигнал, пропорциональный требуемому электромагнитному моменту  , поступает на первые входы второго и третьего функциональных преобразователей 8, 9.
, поступает на первые входы второго и третьего функциональных преобразователей 8, 9.
Частота вращения магнитного поля статора с форсированием процесса установления требуемого электромагнитного момента при инерционной нагрузке формируется согласно равенству:

где kф - коэффициент форсирования.
Сумма трех первых слагаемых данного равенства формируется на выходе второго функционального преобразователя 8 и подается на вход интегратора 10, выходной сигнал которого поступает на первый вход сумматора 11. На его выходе формируется сигнал, пропорциональный углу поворота магнитного поля 
поступающий на вход первого функционального преобразователя 7. На трех выходах первого функционального преобразователя 7 формируются сигналы: sin α1; 
поступающие на первые входы первого - третьего перемножителей 12-14 соответственно. На выходе третьего функционального преобразователя 9 формируется значение I1m, которое подается на первые входы первого - третьего перемножителей 12-14. На выходах первого - третьего перемножителей 12-14 получаются сигналы  ;
; 
Эти сигналы подаются на входы первого - третьего усилителей тока 15-17, питающих обмотки статора 2-4 токами i1A, i1B, i1C, близкими к оптимальным. В результате АД развивает электромагнитный момент MЭ, равный требуемому значению  , при минимальных суммарных потерях.
, при минимальных суммарных потерях.
Изобретение может быть также использовано в электроприводе с двухфазным асинхронным двигателем. При этом на выходе первого функционального преобразователя 7 необходимо формировать сигналы, пропорциональные синусу и косинусу угла поворота ротора, и использовать первый-второй перемножители 12, 13 и первый-второй усилители тока 15, 16.
При учете насыщения магнитопровода и потерь в стали статора и ротора зависимости оптимальной частоты скольжения и амплитуды вектора тока статора от частоты вращения ротора и требуемого электромагнитного момента  ,
,  не являются линейными функциями.
не являются линейными функциями.
Данные нелинейные зависимости реализуются во втором и третьем функциональных преобразователях 8, 9 соответственно.
Если реальное угловое ускорение отличается от требуемого, то частота вращения магнитного поля корректируется в ту или иную сторону, что форсирует процессы изменения токов в обмотке ротора и ускоряет получение требуемого момента.
Проведено компьютерное моделирование процессов в установившемся режиме работы электропривода на основе двигателя АИР80А6. Результаты компьютерного моделирования приводятся на фиг.2-4.
На фиг.2(а) показаны графики оптимальной частоты скольжения при значениях требуемого электромагнитного момента:  (кривая 1),
(кривая 1),  (кривая 2),
(кривая 2),  (кривая 3),
(кривая 3),  (кривая 4),
(кривая 4),  (кривая 5), где
(кривая 5), где  - номинальный момент. Как видно, с увеличением значения
- номинальный момент. Как видно, с увеличением значения  оптимальная частота скольжения возрастает, что обусловлено увеличением магнитного потока двигателя. Отличительной особенностью предлагаемого изобретения является формирование семейства кривых оптимальной частоты скольжения, реализуемых вторым функциональным преобразователем, в то время как в прототипе оптимальное значение частоты скольжения от требуемого значения электромагнитного момента не зависит, что можно наблюдать на фиг.2(б).
оптимальная частота скольжения возрастает, что обусловлено увеличением магнитного потока двигателя. Отличительной особенностью предлагаемого изобретения является формирование семейства кривых оптимальной частоты скольжения, реализуемых вторым функциональным преобразователем, в то время как в прототипе оптимальное значение частоты скольжения от требуемого значения электромагнитного момента не зависит, что можно наблюдать на фиг.2(б).
На фиг.3(а) показаны графики зависимостей действующего значения тока статора от частоты вращения ротора при различных значениях требуемого электромагнитного момента:  (кривая 1),
(кривая 1),  (кривая 2),
(кривая 2),  (кривая 3),
(кривая 3),  (кривая 4),
(кривая 4),  (кривая 5), где
(кривая 5), где  - номинальный момент. Эти зависимости носят нелинейный характер и реализуются в третьем функциональном преобразователе, в то время как в прототипе действующее значение тока статора при
- номинальный момент. Эти зависимости носят нелинейный характер и реализуются в третьем функциональном преобразователе, в то время как в прототипе действующее значение тока статора при  от частоты вращения ротора не зависит, что можно увидеть на фиг.3(б).
от частоты вращения ротора не зависит, что можно увидеть на фиг.3(б).
На фиг.4 приводятся графики зависимости КПД от угловой скорости скольжения. При этом цифрой 1 отмечена зависимость, полученная без учета насыщения магнитопровода и потерь в стали, а цифрой 2 - с учетом насыщения магнитопровода и потерь в стали. Зависимости 1, 2 получены при номинальном значении частоты вращения ротора ω=289 эл.рад/с. Согласно паспортным данным двигателя АИР80А6 в номинальном режиме КПД составляет 70% при ω2=25,13 эл.рад/с (точка А). При моделировании с использованием прототипа КПД двигателя получается равным 79,9% при  эл.рад/с (точка В, кривая 1). Это значение оказывается существенно завышенным по сравнению с паспортными данными асинхронного двигателя, что свидетельствует о недостаточной точности моделирования, вследствие отсутствия в прототипе учета влияния насыщения магнитопровода и потерь в стали. При моделировании с использованием изобретения КПД двигателя получается равным 72,4% при
эл.рад/с (точка В, кривая 1). Это значение оказывается существенно завышенным по сравнению с паспортными данными асинхронного двигателя, что свидетельствует о недостаточной точности моделирования, вследствие отсутствия в прототипе учета влияния насыщения магнитопровода и потерь в стали. При моделировании с использованием изобретения КПД двигателя получается равным 72,4% при  эл.рад/с (точка С, кривая 2). Оптимальное частотно-токовое управление асинхронным электроприводом с двигателем АИР80А6, учитывающее насыщение магнитопровода и потери в стали, в ходе эксперимента позволило получить КПД двигателя, равное 72% при
эл.рад/с (точка С, кривая 2). Оптимальное частотно-токовое управление асинхронным электроприводом с двигателем АИР80А6, учитывающее насыщение магнитопровода и потери в стали, в ходе эксперимента позволило получить КПД двигателя, равное 72% при  эл.рад/с (точка D). Очевидно, что за счет оптимального частотно-токового управления, учитывающего насыщение магнитопровода и потери в стали, удалось повысить КПД двигателя при номинальной нагрузке на 2,0%.
эл.рад/с (точка D). Очевидно, что за счет оптимального частотно-токового управления, учитывающего насыщение магнитопровода и потери в стали, удалось повысить КПД двигателя при номинальной нагрузке на 2,0%.
Таким образом, предлагаемый моментный асинхронный электропривод позволяет реализовать частотно-токовое управление асинхронным двигателем с учетом насыщения магнитопровода и потерь в стали, в результате чего повышается энергоэффективность работы электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2163414C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1642558A1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2426219C1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Следящий моментный электропривод | 1991 |
|
SU1815787A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
Изобретение относится к области электротехники и может быть использовано в промышленных, транспортных и приборных электромеханических системах. Технический результат заключается в повышении энергоэффективности работы электропривода за счет учета насыщения магнитопровода и потерь в стали статора и ротора асинхронного двигателя. Моментный асинхронный электропривод содержит асинхронный двигатель (1) с трехфазной обмоткой статора (2-4) и короткозамкнутым ротором (5), датчик частоты вращения (6), первый - третий функциональные преобразователи (7-9), интегратор (10), сумматор (11), первый - третий перемножители (12-14), первый - третий усилители тока (15-17). Входом электропривода являются первые входы второго и третьего функциональных преобразователей (8), (9). 6 ил.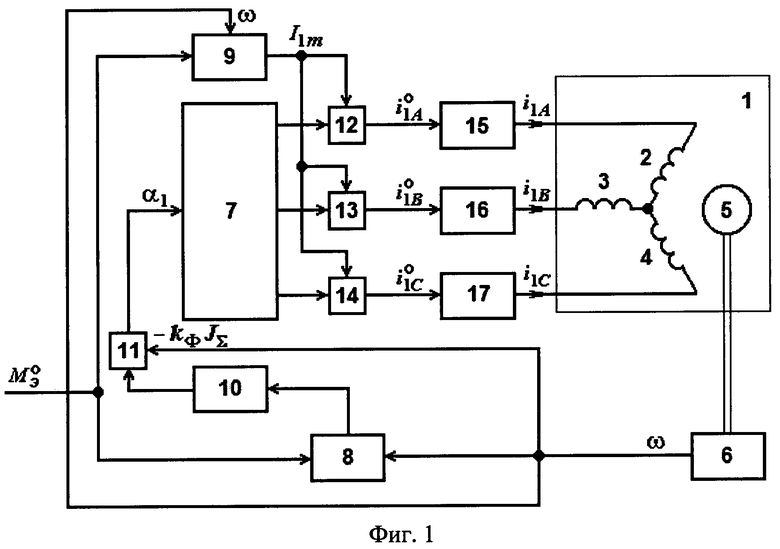
Моментный асинхронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, датчик частоты вращения, сумматор, первый функциональный преобразователь, перемножители, интегратор, усилители тока, при этом ротор асинхронного двигателя механически связан с ротором датчика частоты вращения, выход которого подключен к инвертирующему второму входу сумматора, к первому входу которого подключен выход интегратора, выход сумматора подключен к входу первого функционального преобразователя, его выходы подключены к первым входам перемножителей, их выходы подключены к входам усилителей тока, к их выходам подключены обмотки статора асинхронного двигателя, причем первый функциональный преобразователь формирует на выходах сигналы, пропорциональные синусу угла поворота магнитного поля статора с учетом угла сдвига фаз, отличающийся тем, что в него введены второй функциональный преобразователь, первый вход которого подключен к входу электропривода, второй вход подключен к выходу датчика частоты вращения, а выход подключен к входу интегратора, и третий функциональный преобразователь, первый вход которого подключен к входу электропривода, его второй вход подключен к выходу датчика частоты вращения, а выход подключен ко вторым входам перемножителей, причем второй функциональный преобразователь формирует на выходе сигнал, равный скорости поворота магнитного поля статора без учета форсировки по частоте вращения ротора, а третий функциональный преобразователь формирует на выходе сигнал, равный амплитудному значению системы фазных токов статора.
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2163414C1 |
| RU 2000127638 A, 27.10.2002 | |||
| US 4006391 A, 01.02.1997 | |||
| DE 1935130 A1, 15.01.1970 | |||
| Устройство для формирования остатков по модулю | 1986 |
|
SU1444774A1 |

