(54) ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИНТЕГРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный электропривод | 1979 |
|
SU828352A1 |
| Моментный электропривод | 1978 |
|
SU739701A1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1121691A1 |
| Преобразователь угла поворота вала в напряжение | 1983 |
|
SU1124360A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1661925A1 |
| Моментный вентильный электродвигатель с устройством для его настройки | 1987 |
|
SU1661926A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2050673C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
t
Изобретение относится к электромеханическим устройствам автоматики и может быть использовано для автоматических систем управления подвижньвии объектами и для автоматизации производственных процессов.
Известен электромеханический интегратор, имеющий в своем составе электродвигатель ti3.
Одиако ввиду сложности и громоздкости использование этого устройства по вышеуказанному назначению малоэффективно. .
Известен также электромеханический интегратор, состоящий их электронного усилителя, исполнительного асинхронного микродвигателя, понижаницего редуктора н индуктивного датчика положения плунжер которого связан через редуктор с валом двигателя. Выходное напря жение и индуктивного датчика пропорционально перемещению плунжера, а значит и углу поворота 8 вала исполни тельного двигателя 2 .
Недостатком данного электромеханического интегратора является относительная сложность конструкции и ограни енность угла поворота датчика поло жения, что приводит к ограничению времени интегрирования, так как провесе интегрирования происходит только , до тех пор, пока датчик положения работает в линейной зоне.
Наиболее близким по технической сущности к изобретению является электромеханический интегратор, содержащий встроенные в герметичном корпусе моментный двигатель, датчик угла, редуктор и сильфон. Входной сигнал подается на управляющую обмотку моментного двигателя
Недостаток этого электромеханического интегратора-ограниченное время интегрирования.
Цель изобретения - увеличение времени интегрирования.
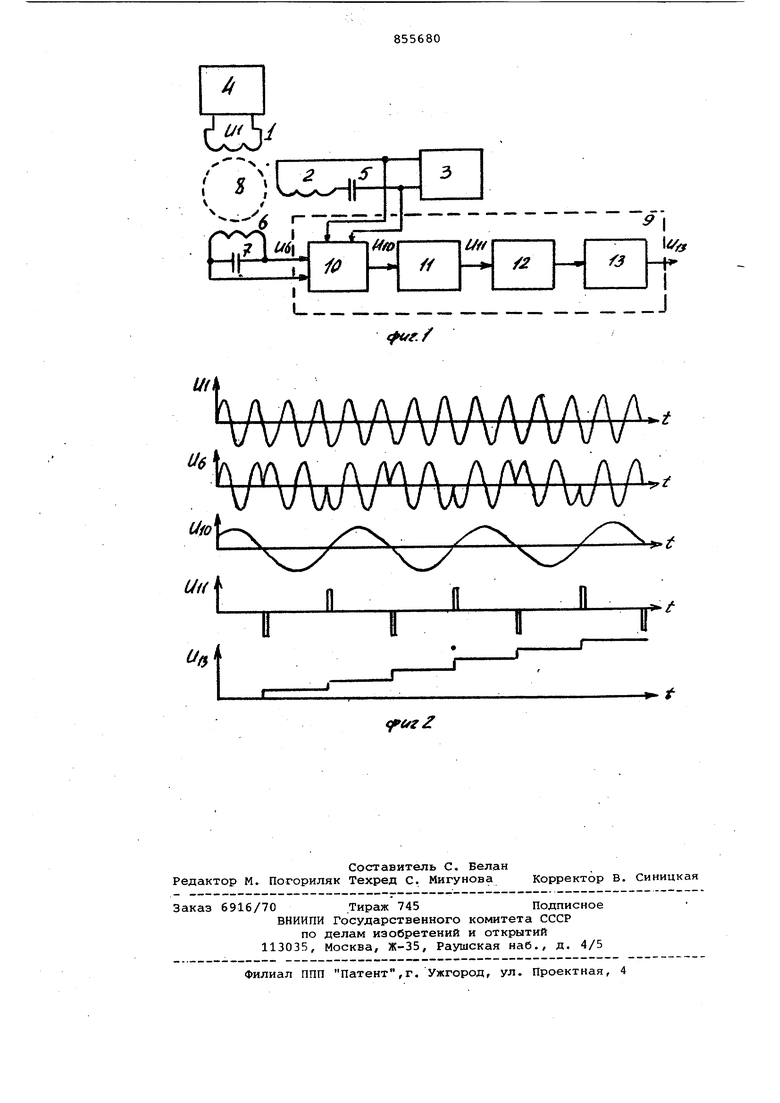
Поставленная цель достигается тем, что в электромеханический интегратор, содержащий электродвигатель индукторного типа, первичная обмотка которого соединена с источником питания через фазосдвигающий конденсатор, введены фазовый детектор, формирователь импульсов, счетчик и преобразователь код-напряжение, соединенные последовательно, причем управляющий вход фазового детектора подключен к вторичной обмотке электродвигателя индукторного типа, паргшлельно которой включен дополнительно введенный сглаживающий конденсатор, а выход источника питания подключен к входу опорного напряжения фазового детектора. На фиг. 1 представлена блок-схема электромеханического интегратора, на фиг. 2 - диаграммы, поясняющие работу интегратора. Предлагаемый электромеханический интегратор содержит первичные, например, двухфазные обмотки 1 и 2 (фиг. 1) сдвинуты относительно друг друга на 90 и подсоединены к источнику 3 питания и источнику 4 управля щего напряжения. Фазосдвигающий конденсатор 5 служит для сдвига фазы напряжения возбуждения на 90 электри ческих градусов. Вторичная обмотка 6 двигателя замкнута на сглаживающий конденсатор 7, подобранный из услови резонанса. Зубчатый ротор 8 двигателя обмоток не имеет и служит для модуляции магнитного поля. Вторичная обмотка б, несущая информацию об угл поворота ротора, соединена с усилительно-преобразовательным устройством 9. в усилительно-преобразователь ное устройство 9 входит фазовый детектор 10, опорный вход кЬторого сое динен с источником 3 питания, а выхо соединен с входом формирователя 11 импульсов. Выход формирователя 11 импульсов соединен со входом счетчик 12, выход которого соединен со входо преобразователя 13 код-напряжение. Работа электромеханического интегр тора осуществляется следующим образо При подаче на обмотку 1 управляющего напряжения от источника 4, а на обмотку 2 - напряжения питания от источника 3, сдвинутого на 90 электрических градусов относительно управля ющего напряжения, появляется вращающий момент, приложенный к ротору 8 двигателя. Ротор 8 вращается,вследствие чего начинает изменяться фаза напряжения вторичной обмотки б относительно напряжения питания. Периодичность изменения фазы определяется зубцовым делением ротора 8. На выходе фазового детектора 10 появляется напряжение с периодом, определяемым зубцовым делением ротора. Из этого напряжения при помощи формирователя 11 импульсов формируются импульсы положительной и отрицательной полярности. Эти импульсы подсчитываются реверсивным счетчиком Преобразователь 13 код-напряжение преобразует код, записанный в счетчике 12 в напряжение, пропорциональное числу пришедших импульсов. При изменении знака управляющего напряжения на обмотке 1 двигателя, двигатель вращается в противоположную сторону, что вызывает изменение порядка чередования положительных и отрицательных импульсов формирователя 11.при этом меняется знак напряжения на выходе преобразователя 13 код-напряжение. Максимальное время интегрирования предлагаемого электромеханического интегратора определяется емкостью счетчика 12 и оно может быть сделано достаточно большой величины. Такое выполнение электромеханического интегратора позволяет обойтись без самостоятельного датчика угла или положения, так как выходной сигнал, пропорциональный углу по-, ворота ротора, снимается непосредственно со вторичной обмотки моментного двигателя. Это дает возможность упростить конструкцию, уменьшить вес и габариты прибора. Редукция угла поворота в предлагаемом электромеханическом интеграторе достигается за счет свойств индукторного двигателя, использующего в качестве рабочего магнитного поля одну из высших пространственных гармоник магнитного поля. Это позволяет использовать для понижения скорости и угла поворота электромагнитную редукцию и отказаться от механического редуктора, тем самым упростив электромеханический интегратор и уменьшив его вес и габариты. Замена электромеханического датчика угла с ограниченным углом поворота на датчик, образуемый одной из обмоток (вторичной) моментного двигателя и дополнительным электронным блоком позволяет устранить другой присущий известному недостаток в ограниченности времени интегрирования, так как в предлагаемом устройстве время интегри рования ограничено только емкостью счетчика импульсов, и оно может быть сделано достаточно большим. Формула изобретения Электромеханический интегратор, содержащий электродвигатель индукторного типа, первичная обмотка которого соединена с источником питания через . Фазосдвигающий конденсатор, отличающийся тем, что, с целью увеличения времени, в него введены фазовый детектор,формирователь импульсов, счётчик и преобразователь коднапряжение, соединенные последовательно, причем управляющий вход фазового детектора подключен к вторичной обмотке электродвигателя индукторного типа, параллельно которой включен дополнительно введенный сглаживающий конденсатор, а выход источника питания подключен к входу опор-, ного напряжения фазового детектора. Источники информации, принятые во внимание при экспертизе 1.Патент США 3201669, кл.318-30,. опублик. 1965. 2.Армейский Е.В. и др. Электрические микромашины,М.,Высшая школа,1975, 3.Авторское свидетельство СССР 179019, кл. G Об G 7/188, 1966 (прототип).
.f
f(tz2 t
